当前位置:网站首页>HAL库配置通用定时器TIM触发ADC采样,然后DMA搬运到内存空间。
HAL库配置通用定时器TIM触发ADC采样,然后DMA搬运到内存空间。
2022-07-07 07:48:00 【小李干净又卫生】
ADC+TIM+DMA
1.简介
HAL库配置通用定时器TIM触发ADC采样,然后DMA搬运到内存空间。
MCU为STM32F429
ADC的触发可以配置为外部触发转换
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tFktjPYf-1656982815084)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704210218702.png)]](/img/88/613fb106355edde696d3c1fb3ae885.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eVeuhPNf-1656982815085)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704210230784.png)]](/img/9e/450aebbe972059a64d6e00ebd2250c.png)
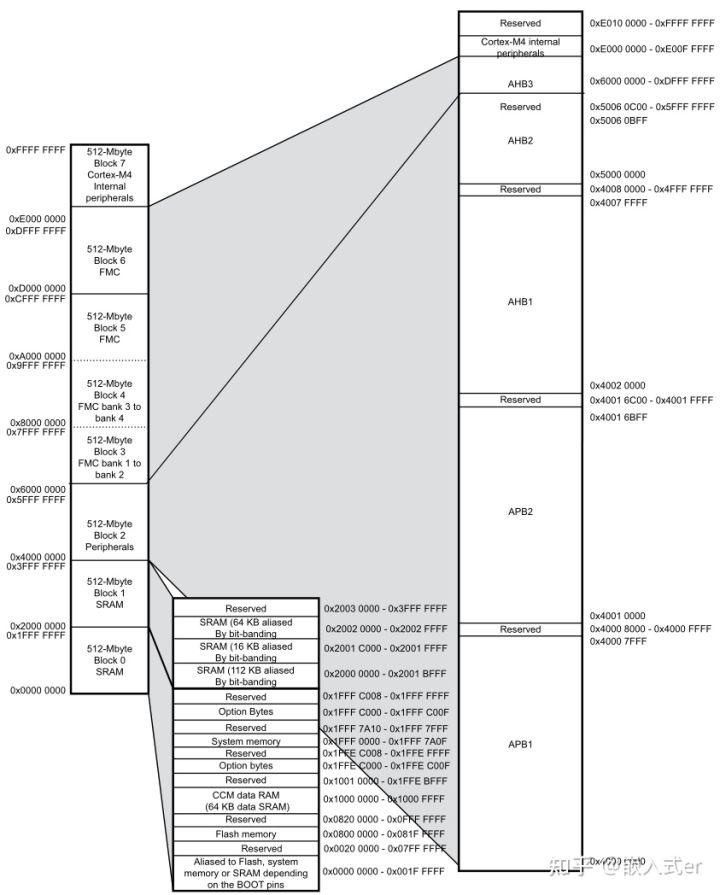
支持定时器作为触发源,
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FM9xrPPO-1656982815086)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704210425246.png)]](/img/0e/d41dfb7a02de203c56115e1b71cf6e.png)
定时器的输出也可以不配置GPIO引脚,专门选一个输出通道作为触发源来控制ADC的采样。
2.cubemx的配置以及代码
cubemx的版本为6.6.0
mdk的版本为5.34
ADC配置
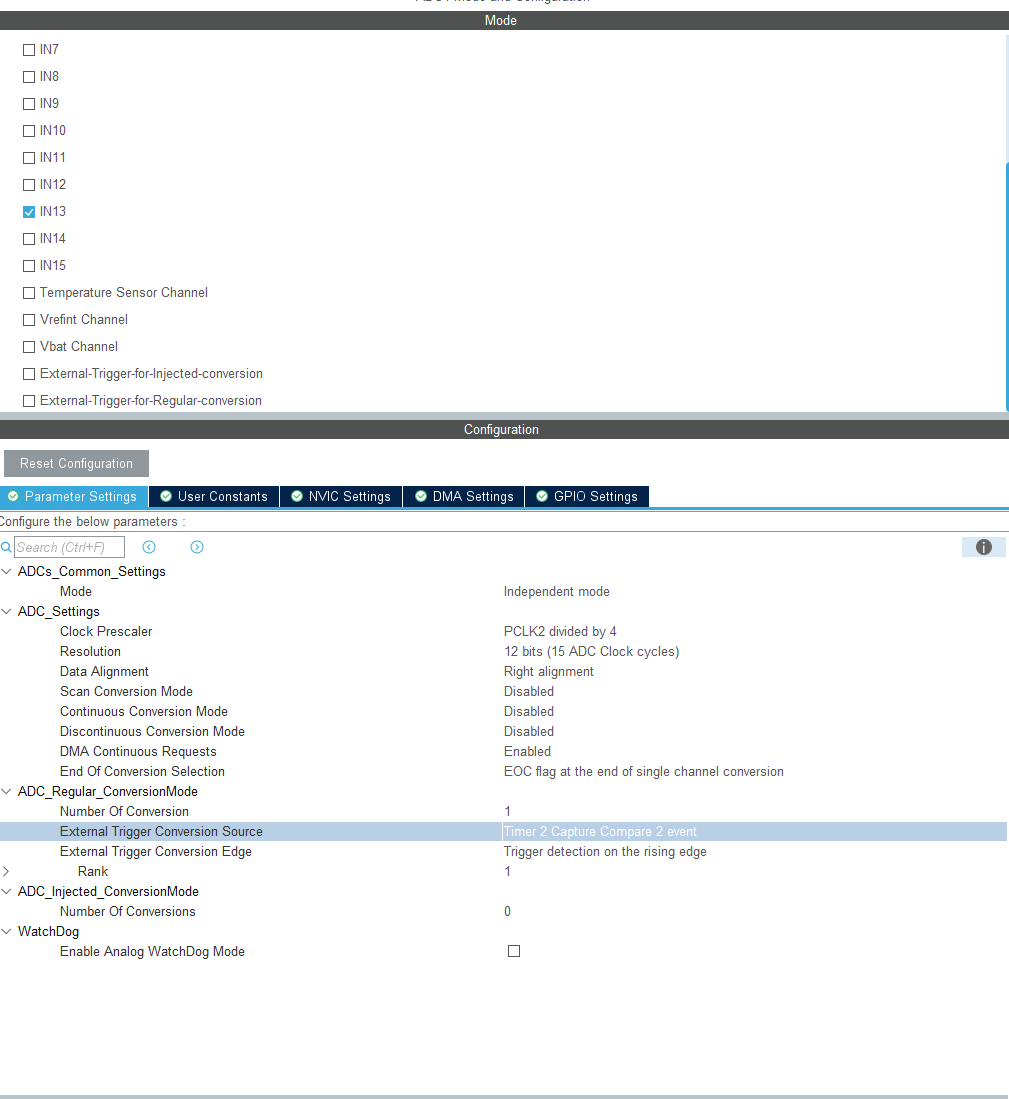
因为要使用TIM来触发ADC,所以要关闭连续模式,在下面的触发选项选择TIM2的通道2,触发边沿选择上升沿触发。
DMA配置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-EljW2Uqt-1656982815086)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704211910222.png)]](/img/cb/a4b18c6cd3971c51534bb57b584a06.png)
要选择循环模式,否则DMA只传输一次就结束了,达不到一直触发ADC一直搬运数据的结果。
定时器的配置。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iDRLff1b-1656982815087)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704212059245.png)]](/img/1c/2b46f9c2647b202dd87ac8d26d70ec.png)
因为ADC是上升沿触发,可以使用定时器的PWM输出模式,可以方便的设计输出的频率,TIM2通道2设置为没有外部输出模式,用PSC将频率设置为1M,之后将频率设置为500ms,占空比设置为50%,其实占空比是没用的,因为只有上升沿才会触发采样。
/* USER CODE BEGIN Header */
/** ****************************************************************************** * @file adc.c * @brief This file provides code for the configuration * of the ADC instances. ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "adc.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
ADC_HandleTypeDef hadc1;
DMA_HandleTypeDef hdma_adc1;
/* ADC1 init function */
void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = {
0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion) */
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_RISING;
hadc1.Init.ExternalTrigConv = ADC_EXTERNALTRIGCONV_T2_CC2;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DMAContinuousRequests = ENABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time. */
sConfig.Channel = ADC_CHANNEL_13;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/* ADC1 clock enable */
__HAL_RCC_ADC1_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/**ADC1 GPIO Configuration PC3 ------> ADC1_IN13 */
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* ADC1 DMA Init */
/* ADC1 Init */
hdma_adc1.Instance = DMA2_Stream0;
hdma_adc1.Init.Channel = DMA_CHANNEL_0;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR;
hdma_adc1.Init.Priority = DMA_PRIORITY_LOW;
hdma_adc1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_adc1) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(adcHandle,DMA_Handle,hdma_adc1);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspDeInit 0 */
/* USER CODE END ADC1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC1_CLK_DISABLE();
/**ADC1 GPIO Configuration PC3 ------> ADC1_IN13 */
HAL_GPIO_DeInit(GPIOC, GPIO_PIN_3);
/* ADC1 DMA DeInit */
HAL_DMA_DeInit(adcHandle->DMA_Handle);
/* USER CODE BEGIN ADC1_MspDeInit 1 */
/* USER CODE END ADC1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/** ****************************************************************************** * @file dma.c * @brief This file provides code for the configuration * of all the requested memory to memory DMA transfers. ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "dma.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/*----------------------------------------------------------------------------*/
/* Configure DMA */
/*----------------------------------------------------------------------------*/
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/** * Enable DMA controller clock */
void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA2_CLK_ENABLE();
/* DMA interrupt init */
/* DMA2_Stream0_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream0_IRQn);
}
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* USER CODE BEGIN Header */
/** ****************************************************************************** * @file tim.c * @brief This file provides code for the configuration * of the TIM instances. ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim2;
/* TIM2 init function */
void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {
0};
TIM_MasterConfigTypeDef sMasterConfig = {
0};
TIM_OC_InitTypeDef sConfigOC = {
0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 45;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 500000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_OC2REF;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 250000-1;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspDeInit 0 */
/* USER CODE END TIM2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* USER CODE BEGIN TIM2_MspDeInit 1 */
/* USER CODE END TIM2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "dma.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
uint16_t adc_buffer[1] = {
0};
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/** * @brief The application entry point. * @retval int */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)&adc_buffer,1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
printf("\r\n-----------\r\n");
HAL_Delay(5000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/** * @brief System Clock Configuration * @retval None */
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
/** Configure the main internal regulator output voltage */
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 15;
RCC_OscInitStruct.PLL.PLLN = 216;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode */
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
printf("ADC %d \r\n",adc_buffer[0]);
}
/* USER CODE END 4 */
/** * @brief This function is executed in case of error occurrence. * @retval None */
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
DMA在传输结束或者传输一半的时候会产生中断,可以通过配置中断回调函数实现在传输完成之后自动通过串口打印出ADC采样的数据。HAL库实现DMA的中断服务函数的方式稍微有点复杂。
首先在stm32f4xx_it.c文件中可以找到DMA的中断服务函数
void DMA2_Stream0_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream0_IRQn 0 */
/* USER CODE END DMA2_Stream0_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_adc1);
/* USER CODE BEGIN DMA2_Stream0_IRQn 1 */
/* USER CODE END DMA2_Stream0_IRQn 1 */
}
在中断服务函数HAL_DMA_IRQHandler中可以看到有调用一些回调函数
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XzqAWBKb-1656982815087)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704213743233.png)]](/img/d9/451d4909236148fda3d5d822e46179.png)
DMA的回调函数有很多,不同的中断状态使用不同的回调函数,但是这些函数都是没有定义的,函数的定义不是在DMA的文件中负责的,因为不只是ADC可以使用DMA,比如串口等也可以使用DMA,大家都有传输状态的中断,DMA无法在自己的文件中全部实现好,因此要让使用DMA的这些外设去设置回调函数。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Z9EiKF4N-1656982815087)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704213846230.png)]](/img/01/1ee64ff840862794da82d364931b0c.png)
再看开启ADC_DMA的函数HAL_ADC_Start_DMA
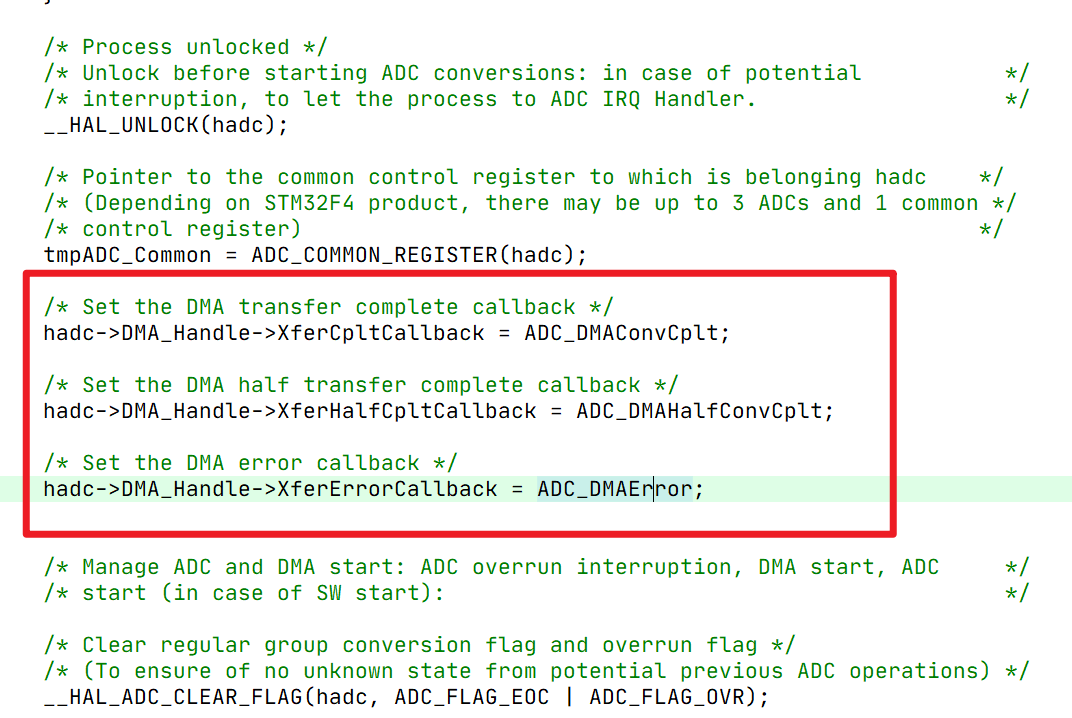
发现这个函数把一些ADC专有的函数赋给了DMA的这些空的回调函数,同样其他的外设应该也是使用这种方式把这个外设专有的函数赋到DMA的回调函数上面。
再来看ADC_DMAConvCplt,ADC数据传输完成的回调函数
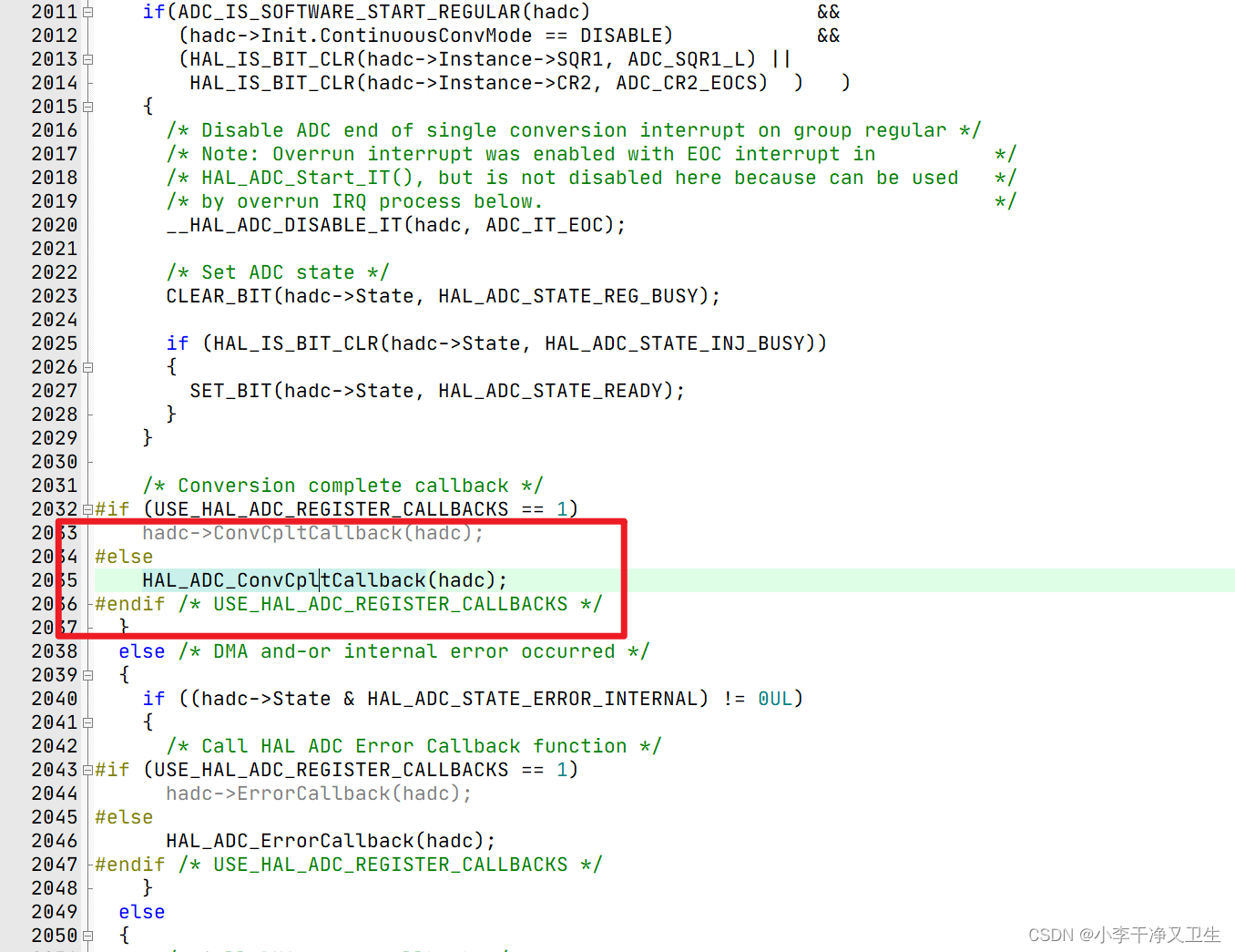
在这个函数中发现了真正需要自己编写的回调函数HAL_ADC_ConvCpltCallback(hadc);
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UWM9Upn7-1656982815088)(https://raw.githubusercontent.com/Master-4869/pictures/main/image-20220704214904184.png)]](/img/9b/9b4a0028aabe89e0bf62275f7a3a14.png)
这个函数是弱定义的,如果没有重新定义就会以弱定义为准,如果重新定义了就会以新定义的函数为准,可以重新定义此函数实现我们想要在中断中实现的功能。
比如,每次传输完成就串口将数据发送出去。
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
printf("ADC %d \r\n",adc_buffer[0]);
}
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XzctgpIx-1656982815088)(https://raw.githubusercontent.com/Master-4869/pictures/main/1111111.gif)]](https://img-blog.csdnimg.cn/6df69364bc1046a8aace18c11488184f.gif)
整体工程已上传
边栏推荐
猜你喜欢

![[untitled]](/img/5b/61efbaded29250bc8d921b0cf087c8.png)
随机推荐
Performance optimization record of the company's product "yunzhujia"
Hcip first day notes sorting
arcgis操作:dwg数据转为shp数据
Huffman encoded compressed file
Pit encountered by vs2015 under win7 (successful)
Flinkcdc failed to collect Oracle in the snapshot stage. How do you adjust this?
Before joining the chain home, I made a competitive product analysis for myself
Apprentissage avancé des fonctions en es6
Enterprise practice | construction of banking operation and maintenance index system under complex business relations
Wallys/IPQ6010 (IPQ6018 FAMILY) EMBEDDED BOARD WITH ON-BOARD WIFI DUAL BAND DUAL CONCURRENT
STM32产品介绍
MCU与MPU的区别
Luogu p2482 [sdoi2010] zhuguosha
高数_第1章空间解析几何与向量代数_向量的数量积
Programming features of ISP, IAP, ICP, JTAG and SWD
ES类和对象、原型
STM32 product introduction
China's first electronic audio category "Yamano electronic audio" digital collection is on sale!
Postman tutorial - scripting
ISP、IAP、ICP、JTAG、SWD的编程特点