当前位置:网站首页>I.MX6U-ALPHA开发板(C语言版本LED驱动实验)
I.MX6U-ALPHA开发板(C语言版本LED驱动实验)
2022-07-04 03:52:00 【*﹏ℳ๓无情*】
一、C语言运行环境测试
.global _start /* 全局标号 */
_start:
/* 进入SVC模式 */
mrs r0, cpsr
bic r0, r0, #0x1f /* 将r0寄存器中的低5位清零,也就是cpsr的M0~M4*/
orr r0, r0, #0x13 /* r0或上0x13,表示使用SVC模式*/
msr cpsr, r0 /* 将r0 的数据写入到cpsr_c中*/
ldr sp, =0X80200000 /* 设置栈指针*/
b main /* 跳转到main函数 */
一、设置处理器模式
设置6ULL处于SVC模式 下。设置CPSR寄存器的bit4-0,也就是M[4:0]为10011=0X13。读写状态寄存器需要用到MRS和MSR指令。MRS将CPSR寄存器数据读出到通用寄存器里面,MSR指令将通用寄存器的值写入到CPSR寄存器里面去。
二、设置sp指针
Sp可以指向内部RAM,也可以指向DDR,我们将其指向DDR。Sp设置到哪里?512MB的范围0x80000000~0x9FFFFFFF。栈大小,0x200000=2MB。处理器栈增长方式,对于A7而言是向下增长的。设置sp指向0x80200000。
三、跳转到C语言
使用b指令,跳转到C语言函数,比如main函数。
二、软件编写
#ifndef __MAIN_H
#define __MAIN_H
/* * CCM相关寄存器地址 */
#define CCM_CCGR0 *((volatile unsigned int *)0X020C4068)
#define CCM_CCGR1 *((volatile unsigned int *)0X020C406C)
#define CCM_CCGR2 *((volatile unsigned int *)0X020C4070)
#define CCM_CCGR3 *((volatile unsigned int *)0X020C4074)
#define CCM_CCGR4 *((volatile unsigned int *)0X020C4078)
#define CCM_CCGR5 *((volatile unsigned int *)0X020C407C)
#define CCM_CCGR6 *((volatile unsigned int *)0X020C4080)
/* * IOMUX相关寄存器地址 */
#define SW_MUX_GPIO1_IO03 *((volatile unsigned int *)0X020E0068)
#define SW_PAD_GPIO1_IO03 *((volatile unsigned int *)0X020E02F4)
/* * GPIO1相关寄存器地址 */
#define GPIO1_DR *((volatile unsigned int *)0X0209C000)
#define GPIO1_GDIR *((volatile unsigned int *)0X0209C004)
#define GPIO1_PSR *((volatile unsigned int *)0X0209C008)
#define GPIO1_ICR1 *((volatile unsigned int *)0X0209C00C)
#define GPIO1_ICR2 *((volatile unsigned int *)0X0209C010)
#define GPIO1_IMR *((volatile unsigned int *)0X0209C014)
#define GPIO1_ISR *((volatile unsigned int *)0X0209C018)
#define GPIO1_EDGE_SEL *((volatile unsigned int *)0X0209C01C)
#endif
#include "main.h"
/*使能外设时钟*/
void clk_enable(void)
{
CCM_CCGR1 = 0xFFFFFFFF;
CCM_CCGR2 = 0xFFFFFFFF;
CCM_CCGR3 = 0xFFFFFFFF;
CCM_CCGR4 = 0xFFFFFFFF;
CCM_CCGR5 = 0xFFFFFFFF;
CCM_CCGR6 = 0xFFFFFFFF;
}
/*初始化LED*/
void led_init(void)
{
SW_PAD_GPIO1_IO03 = 0x5;/*复用为GPIO1-IO03*/
SW_PAD_GPIO1_IO03 = 0x10B0;/*设置GPIO1——IO03电气属性*/
/*GPIO初始化*/
GPIO1_GDIR = 0x8;/*设置为输出*/
GPIO1_DR = 0x0;/*打开LED灯*/
}
/*短延时*/
void delay_short(volatile unsigned int n)
{
while(n--){
}
}
void delay(volatile unsigned int n)
{
while(n--)
{
delay_short(0x77f); //1毫秒(396MHZ)
}
}
void led_on(void)
{
GPIO1_DR &= ~(1<<3);
}
void led_off(void)
{
GPIO1_DR |= (1<<3);
}
int main(void)
{
clk_enable();
led_init();
while(1)
{
led_on();
delay(500);
led_off();
delay(500);
}
return 0;
}
三、链接脚本
链接脚本描述了要连接的文件,以及链接顺序,和链接首地址
链接脚本的语法很简单,就是编写一系列的命令,这些命令组成了链接脚本,每个命令是一个带有参数的关键字或者一个对符号的赋值,可以使用分号分隔命令。像文件名之类的字符串可以直接键入,也可以使用通配符“*”。最简单的链接脚本可以只包含一个命令“SECTIONS”,我们可以在这一个“SECTIONS”里面来描述输出文件的内存布局。我们一般编译出来的代码都包含在 text、data、bss 和 rodata 这四个段内,
我们本试验的链接脚本要求如下:
①、链接起始地址为 0X87800000
②、start.o 要被链接到最开始的地方,因为 start.o 里面包含这第一个要执行的命令
根据要求,在 Makefile 同目录下新建一个名为“imx6ul.lds”的文件,然后在此文件里面输入如下所示代码:
SECTIONS{
. = 0X87800000;
.text :
{
start.o
main.o
*(.text)
}
.rodata ALIGN(4) : {*(.rodata*)}
.data ALIGN(4) : { *(.data) }
__bss_start = .;
.bss ALIGN(4) : { *(.bss) *(COMMON) }
__bss_end = .;
}
第 1 行我们先写了一个关键字“SECTIONS”,后面跟了一个大括号,这个大括号和第14行的大括号是一对,这是必须的。看起来就跟 C 语言里面的函数一样。
第 2 行对一个特殊符号“.”进行赋值,“.”在链接脚本里面叫做定位计数器,默认的定位计数器为 0。我们要求代码链接到以 0X87800000为起始地址的地方,因此这一行给“.”赋值0X87800000,表示以0X87800000开始,后面的文件或者段都会以0X87800000为起始地址开始链接。
第 3 行的“.text”是段名,后面的冒号是语法要求,冒号后面的大括号里面可以填上要链接到“.text”这个段里面的所有文件,“(.text)”中的“”是通配符,表示所有输入文件的.text段都放到“.text”中。
第5行设置链接到开始位置的文件为start.o,因为 start.o 里面包含着第一个要执行的指令,所以一定要链接到最开始的地方。第 6 行是 main.o这个文件,其实可以不用写出来,因为 main.o 的位置就无所谓了,可以由编译器自行决定链接位置。
第10行定义了一个名为“.data”的段,然后所有文件的“.data”段都放到这里面。ALIGN(4)是用来对“.data”这个段的起
始地址做字节对齐的,ALIGN(4)表示 4 字节对齐。也就是说段“.data”的起始地址要能被 4 整除,一般常见的都是 ALIGN(4)或者 ALIGN(8),也就是 4 字节或者 8 字节对齐。
在第 11、13 行的__bss_start和__bss_end是符号,第 11、13 这两行其实就是对这两个符号进行赋值,其值为定位符“.”,这两个符号用来保存.bss 段的起始地址和结束地址。.bss 段是定义了但是没有被初始化的变量,我们需要手动对.bss 段的变量清零的,因此我们需要知道.bss 段的起始和结束地址,这样我们直接对这段内存赋 0 即可完成清零。通过第 11、13 行代码,.bss 段的起始地址和结束地址就保存在了__bss_start和__bss_end中,我们就可以直接在汇编或者C 文件里面使用这两个符号。
执行后LED闪动
边栏推荐
- UnicodeDecodeError: ‘gbk‘ codec can‘t decode byte 0x98 in position 1093: illegal multibyte sequence
- Three years of graduation, half a year of distance | community essay solicitation
- RHCSA 04 - 进程管理
- 仿《游戏鸟》源码 手游发号评测开服开测合集专区游戏下载网站模板
- Perf simple process for multithreaded profile
- [Logitech] m720
- 01 QEMU starts the compiled image vfs: unable to mount root FS on unknown block (0,0)
- Exercises in quantum mechanics
- 透过JVM-SANDBOX源码,了解字节码增强技术原理
- Understand the principle of bytecode enhancement technology through the jvm-sandbox source code
猜你喜欢
架构训练毕业设计+总结

leetcode刷题:二叉树04(二叉树的层序遍历)

2021 RSC | Drug–target affinity prediction using graph neural network and contact maps
User defined path and file name of Baidu editor in laravel admin
Parameterization of controls in katalon

Flink学习6:编程模型
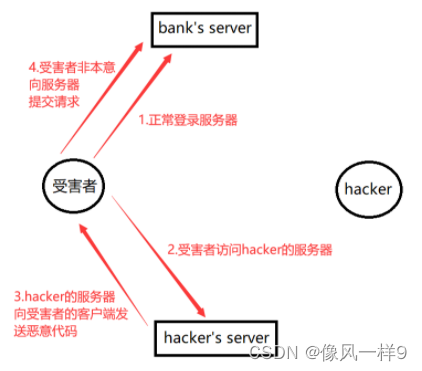
【CSRF-01】跨站请求伪造漏洞基础原理及攻防
普源DS1000Z系列数字示波器在通信原理实验中的应用方案
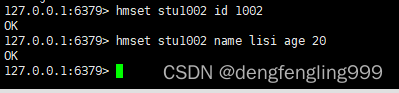
Redis:哈希hash类型数据操作命令

Redis:有序集合zset类型数据操作命令
随机推荐
【微服务|openfeign】feign的两种降级方式|Fallback|FallbackFactory
Interpretation of leveldb source code skiplist
Pointer array and array pointer
微信公众号无限回调授权系统源码
RHCSA 04 - 进程管理
还原窗口位置的微妙之处
02 specific implementation of LS command
Redis cluster view the slots of each node
统计遗传学:第三章,群体遗传
Msgraphmailbag - search only driveitems of file types
[microservice openfeign] use openfeign to remotely call the file upload interface
Leetcode skimming: binary tree 08 (maximum depth of n-ary tree)
JS实现文字滚动 跑马灯效果
ROS2中CMake编译选项的设置
量子力学习题
Unity draws the trajectory of pinball and billiards
2020 Bioinformatics | TransformerCPI
线程常用的方法
How was my life in 2021
2020 Bioinformatics | TransformerCPI