当前位置:网站首页>复合非线性反馈控制(二)
复合非线性反馈控制(二)
2022-07-04 05:31:00 【neuer】
复合非线性反馈控制(二)
上一篇文章写了CNF的定点跟踪控制律的设计,接下来接着介绍CNF轨迹跟踪控制律的设计。其示意图如下图-1所示。相比于定点跟踪的CNF控制,轨迹跟踪的CNF控制多了一个信号发生器结构,因为如果直接将定点跟踪的方案应用于对曲线信号轨迹跟踪,会出现明显的相位滞后现象。

一、复合非线性反馈轨迹跟踪控制律设计
本文所针对如下描述的被控对象模型:
有几点常规的假设,是一般跟踪控制问题中的典型要求
(A,B)可镇定 (A,C)可检测 (A,B,C)在右半闭平面无不变零点 (A,E,C)在s=0处无不变零点 d是未知的有界常值(或分段常值)扰动
第一步:定义信号发生器,它可以生成期望的目标轨迹信号,及其对应的内部状态量:
其中输出rg与目标轨迹信号r(t)相匹配,设计辅助系统的线性控制率为ue,rs是一个外源信号,其中的状态量xe(xe1,xe2就是目标轨迹的位置信息和速度信息)和辅助系统的线性控制率为ue我们下面要用到。为什么这样设计,在例子中具体说明。
第二步:设计线性反馈控制律
定义 ,如下:
这里的反馈矩阵F同样也要满足A+BF是渐进稳定的,将equ(1)和euq(6)相减,并且将我们设计的线性控制律uL带入,我们可得到如下闭环系统
稳态时, 趋向于0, 趋向于常量,由此我们可以得到闭环系统状态向量的稳态值xs
值得注意的是这里的E可不是表示单位矩阵,这里要看扰动与x1有关还是与x2有关,可取值为E=[b;0]或者E=[0;b]。尽管存在干扰d等,跟踪误差仍应该趋向于0趋向于趋向于0,由此我们可以得到fd的表达式
综上,给定一个被控系统模型的A,B,C,D,我们可以首先从信号发生器中获得xe和ue信息,然后选择适当的F,从而得到扰动前馈增益fd,以及闭环系统的稳态值xs,从而我们可以表示出线性控制率
第三步:设计非线性控制率
非线性控制率同上面定点跟踪CNF中非线性控制率的设计相同
第四步:设计扩张状态观测器
扩张状态观测器也不需要改变,同定点跟踪中的设计相同
二、信号发生器的推导证明
下面说一下信号发生器为什么如上面那样设计。CNF的轨迹跟踪控制律的推导可以从一个简化的系统模型开始,假定一个系统模型如下
定义轨迹跟踪的误差信号为
,接下来求系统的误差动态方程, ,与此同时e2的导数也要推导成用e1和e2来表示定义 ,可以写出系统的误差动态方程如下
根据上文的方法,设计复合非线性控制率为
其中,F为状态反馈增益矩阵,使(A+BF)具有稳 定的特征值,且系统的输出响应较快;Fn为非线性反馈增益矩阵。同样可以推导出参数化的形式如下
从上面定义式我们可推出u的表达式,将降阶观测器观测的值带入,可得
fd是一个可调参数,取值范围是0至1之间。将推导出来的u的表达式与上文给出的轨迹跟踪的u的表达式相比较就能知道加入轨迹信号发生器首先是为了得到目标信号的状态量,其次是为了获取辅助控制信号u~e~ ,将他们嵌入到复合非线性反馈控制框架中,从而避免CNF轨迹跟踪的相位滞后问题。但是如果我们要跟踪的仅仅是一个光滑可导的正弦曲线的话,可以直接引出它的位置量和速度量,我们只需要选择合适的反馈增益矩阵Fe和外源信号rs来构造u~e~提供给控制器。
这里给出这两个参数的一般性求法,针对n阶可导得目标轨迹信号,选择Fe使得A+BFe的特征值都为0;外部信号,这里的N(s)是传递函数的分子多项式。正弦余弦目标信号的初值可以取[0,0]。
三、仿真实例
我们假设已知的系统为
转化成我们上述式(1)的状态空间形式,A=[0,1;-51000,-90];B=[0;16000];C=[1,0];假设E=[0,16000],针对形如
我们选择正弦信号 作为目标轨迹,进行simulink仿真其仿真框图如下,配置极点在

CNF控制器编程采用上述推导的参数化的形式,各参数取值如下,
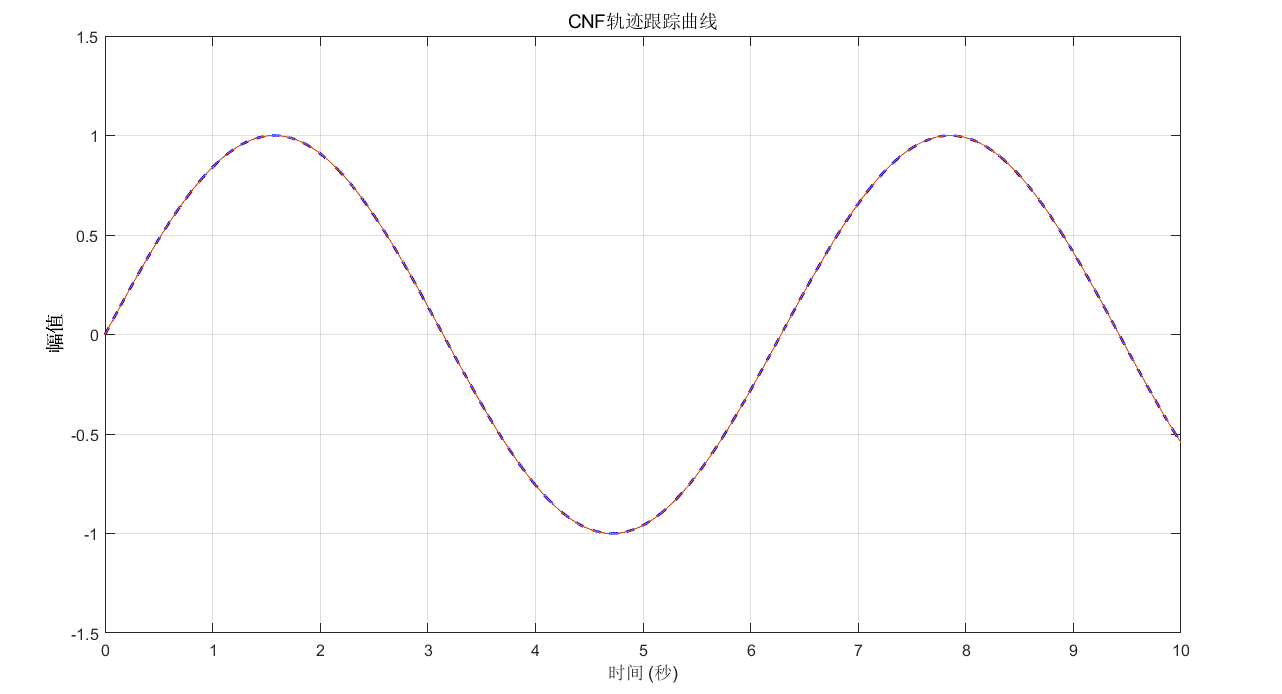
经过参数调整,轨迹跟踪误差在400nm左右,符合要求

四、总结
上述就是复合非线性反馈控制设计的所有内容,总结一下有以下几个特点 1.额外增加的非线性控制量uN不改变系统的稳定性 2.根据系统输出y和参考信号r之间的距离动态调节系统的阻尼 3.非线性控制量uN和线性控制量uL部分抵消 4.能够有效的消减系统的超调量
其中非线性控制量uN和线性控制量ul部分抵消可以从下图-5看出,线性输出和非线性输出一开始是同向的,后来反向。

[1],Improving_Transient_Performance_in_Tracking_General_References_Using_Composite_Nonlinear_Feedback_Control_and_Its_Application_to_High-Speed_XY-Table_Positioning_Mechanism
[2]石暕,程国扬.基于自适应摩擦补偿的复合非线性轨迹跟踪控制[J].电机与控制应用,2021,48(09):14-20.
边栏推荐
- Flask
- The end of the Internet is rural revitalization
- 冲击继电器JC-7/11/DC110V
- BUU-Crypto-Cipher
- Build an Internet of things infrared temperature measuring punch in machine with esp32 / rush to work after the Spring Festival? Baa, no matter how hard you work, you must take your temperature first
- Halcon image calibration enables subsequent image processing to become the same as the template image
- Just do it with your hands 7 - * project construction details 2 - hook configuration
- 2022 R2 mobile pressure vessel filling retraining question bank and answers
- Descriptive analysis of data distribution characteristics (data exploration)
- win10清除快速访问-不留下痕迹
猜你喜欢

2022 question bank and answers for safety management personnel of hazardous chemical business units

Upper computer software development - log information is stored in the database based on log4net

Analysis of classical pointer and array written test questions in C language

BUU-Pwn-test_ your_ nc

ping端口神器psping

基于单片机的太阳能杀虫系统

企业级日志分析系统ELK(如果事与愿违那一定另有安排)

SQL injection - injection based on MSSQL (SQL Server)
【微服务】Nacos集群搭建以及加载文件配置
Kubernets first meeting
随机推荐
Nodejs learning document
检漏继电器JY82-2P
Kubernets first meeting
【QT】制作MyComboBox点击事件
VB. Net calls ffmpeg to simply process video (class Library-6)
C语言简易学生管理系统(含源码)
Wechat applet +php realizes authorized login
BUU-Crypto-[HDCTF2019]basic rsa
BUU-Crypto-Cipher
19.Frambuffer应用编程
VB.net 简单的处理图片,黑白(类库——7)
Introduction to AMBA
JS扁平化数形结构的数组
ETCD数据库源码分析——初始化总览
Zhanrui tankbang | jointly build, cooperate and win-win zhanrui core ecology
Appearance of LabVIEW error dialog box
JS string splicing enhancement
Canoe panel learning video
724. Find the central subscript of the array
Halcon图片标定,使得后续图片处理过后变成与模板图片一样