当前位置:网站首页>机械臂运动学解析
机械臂运动学解析
2022-08-02 03:33:00 【风华同学】
之前做比赛的时候需要通过机械臂进行抓取指定的物体,由于执行指定的机械臂的动作组不够灵活,而且不能很好地满足实际的需求,因此采取机械臂的运动学解析,实现机械臂的抓取。
源代码如下:
import math
""" python程序运动学的机械臂解析 输入的参数:三个连杆的长度、X,Y,Z的坐标点 输出的参数:四个舵机旋转的角度(j0,j1,j2,j3) 注:j4、j5的角度是通过视觉进行角度的确定 """
RAD2ANG = 3.1415926535898 / 180.0
# 三个连杆的长度
L1 = 10.5
L2 = 9.5
L3 = 17
""" 机械臂文档说明 注:接下来是以机械臂的角度进行一个说明:1代表着45° 0号舵机-->-90°~90°(向左为正) 0°为正中心 1号舵机-->-90°~90°(向下为正) 0°为正上方 2号舵机-->-90°~90°(向后为正) 0°为正上方 3号舵机-->-90°~90°(向后为正) 0°为正上方 4号舵机-->-90°~90°(逆时针为正) 0°为横爪 5号舵机-->0°~45°(向右为正) 0°为闭合爪子 """
def and2Rad(N):
return (N) * (180.0 / 3.1415926535898)
def angleToJoint(angle):
return angle * (1 / 45)
def jointToAngle(joint):
return joint * 45
def nowAngle():
# 获取的是当前各个舵机转动的角度对应的joint值
print("now joint:")
i = 0
for joint in arm.GetJointState():
print("joint" + str(i) + ":" + str(jointToAngle(joint)))
i += 1
def inverseKinematics(x, y, z, L1, L2, L3):
""" 运动学逆解:通过传入的X,Y,Z以及三轴机械臂的长度得到每个舵机转动的角度(注意只是求出了前四个的角度,后两个的角度需要根据目标的姿态进行一个调整) 注意:这里的0,1,2,3表示的为j1,j2,j3,j4 """
global final_j2, final_j3, final_j1, final_j0
i = 0
nearest_j3 = 1000
j0 = math.atan2(y, x)
a = x / math.cos(j0)
if (x == 0):
a = y
b = z
for j1 in range(-90, 90):
j1 *= RAD2ANG
try:
j3 = math.acos((pow(a, 2) + pow(b, 2) + pow(L1, 2) - pow(L2, 2) - pow(L3, 2) - 2 * a * L1 * math.sin(
j1) - 2 * b * L1 * math.cos(j1)) / (2 * L2 * L3))
m = L2 * math.sin(j1) + L3 * math.sin(j1) * math.cos(j3) + L3 * math.cos(j1) * math.sin(j3)
n = L2 * math.cos(j1) + L3 * math.cos(j1) * math.cos(j3) - L3 * math.sin(j1) * math.sin(j3)
t = a - L1 * math.sin(j1)
p = math.pow(math.pow(n, 2) + math.pow(m, 2), 0.5)
q = math.asin(m / p)
j2 = math.asin(t / p) - q
x1 = (L1 * math.sin(j1) + L2 * math.sin(j1 + j2) + L3 * math.sin(j1 + j2 + j3)) * math.cos(j0)
y1 = (L1 * math.sin(j1) + L2 * math.sin(j1 + j2) + L3 * math.sin(j1 + j2 + j3)) * math.sin(j0)
z1 = L1 * math.cos(j1) + L2 * math.cos(j1 + j2) + L3 * math.cos(j1 + j2 + j3)
j1 = and2Rad(j1)
j2 = and2Rad(j2)
j3 = and2Rad(j3)
# 逆解与正解的误差在(-0.1,0.1)之间认为完成了运动学的解析
if (x + 0.1) > x1 > (x - 0.1) and (y + 0.1) > y1 > (y - 0.1) and (z + 0.1) > z1 > (z - 0.1):
if -90 < j1 < 90 and 0 < j2 < 180 and -90 < j3 < 180:
# 选取的是j3最接近90°的机械臂的坐标变化,即机械臂最接近垂直向下的角度
if abs(j3 - 90) < nearest_j3:
nearest_j3 = abs(j3 - 90)
# print("j0:%f,j1:%f,j2:%f,j3:%f,x:%f,y:%f,z:%f\r\n" %(and2Rad(j0), j1, j2, j3, x1, y1, z1))
final_j0 = and2Rad(j0)
final_j1 = j1
final_j2 = j2
final_j3 = j3
i = 1
except:
# print("值出现Nan")
pass
for j1 in range(-90, 90):
j1 *= RAD2ANG
try:
j3 = math.acos((math.pow(a, 2) + math.pow(b, 2) + math.pow(L1, 2) - math.pow(L2, 2) - math.pow(L3,
2) - 2 * a * L1 * math.sin(
j1) - 2 * b * L1 * math.cos(j1)) / (2 * L2 * L3))
m = L2 * math.sin(j1) + L3 * math.sin(j1) * math.cos(j3) + L3 * math.cos(j1) * math.sin(j3)
n = L2 * math.cos(j1) + L3 * math.cos(j1) * math.cos(j3) - L3 * math.sin(j1) * math.sin(j3)
t = a - L1 * math.sin(j1)
p = math.pow(math.pow(n, 2) + math.pow(m, 2), 0.5)
q = math.asin(m / p)
j2 = -(math.asin(t / p) - q)
x1 = (L1 * math.sin(j1) + L2 * math.sin(j1 + j2) + L3 * math.sin(j1 + j2 + j3)) * math.cos(j0)
y1 = (L1 * math.sin(j1) + L2 * math.sin(j1 + j2) + L3 * math.sin(j1 + j2 + j3)) * math.sin(j0)
z1 = L1 * math.cos(j1) + L2 * math.cos(j1 + j2) + L3 * math.cos(j1 + j2 + j3)
j1 = and2Rad(j1)
j2 = and2Rad(j2)
j3 = and2Rad(j3)
if (x + 0.1) > x1 > (x - 0.1) and (y + 0.1) > y1 > (y - 0.1) and (z + 0.1) > z1 > (z - 0.1):
if -90 < j1 < 90 and 0 < j2 < 180 and -90 < j3 < 180:
if abs(j3 - 90) < nearest_j3:
nearest_j3 = abs(j3 - 90)
# print("j0:%f,j1:%f,j2:%f,j3:%f,x:%f,y:%f,z:%f\r\n" %(and2Rad(j0), j1, j2, j3, x1, y1, z1))
final_j0 = and2Rad(j0)
final_j1 = j1
final_j2 = j2
final_j3 = j3
i = 1
except:
# print("值出现Nan")
pass
if i == 0:
print("无解")
return None
else:
return final_j0, final_j1, final_j2, final_j3
if __name__ == '__main__':
# 给定的坐标
x = 15
y = 0
z = -13.5
# 坐标转换为角度
if inverseKinematics(x, y, z, L1, L2, L3) is None:
print("无解")
else:
j0, j1, j2, j3 = inverseKinematics(x, y, z, L1, L2, L3)
print("j0=%f,j1=%f,j2=%f,j3=%f\n" % (j0, j1, j2, j3))
边栏推荐
- Comparison between Boda Industrial Cloud and Alibaba Cloud
- Anaconda(Jupyter)里发现不能识别自己的GPU该怎么办?
- 将ORCAD原理图导入allegro中进行PCB设计
- 【nRF24L01 connects with Arduino to realize wireless communication】
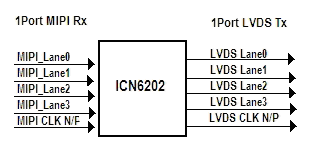
- MIPI解决方案 ICN6202:MIPI DSI转LVDS转换芯片
- 蛮力法求解凸包问题
- 实现动态库(DLL)之间内存统一管理
- GM8775C MIPI转LVDS调试心得分享
- Comparative analysis of mobile cloud IoT pre-research and Alibaba Cloud development
- IDEA2021.2安装与配置(持续更新)
猜你喜欢






随机推荐
Comparative analysis of OneNET Studio and IoT Studio
【Popular Science Post】Detailed explanation of MDIO interface
GM7150 CVBS转BT656视频解码芯片详细内容及设计要求
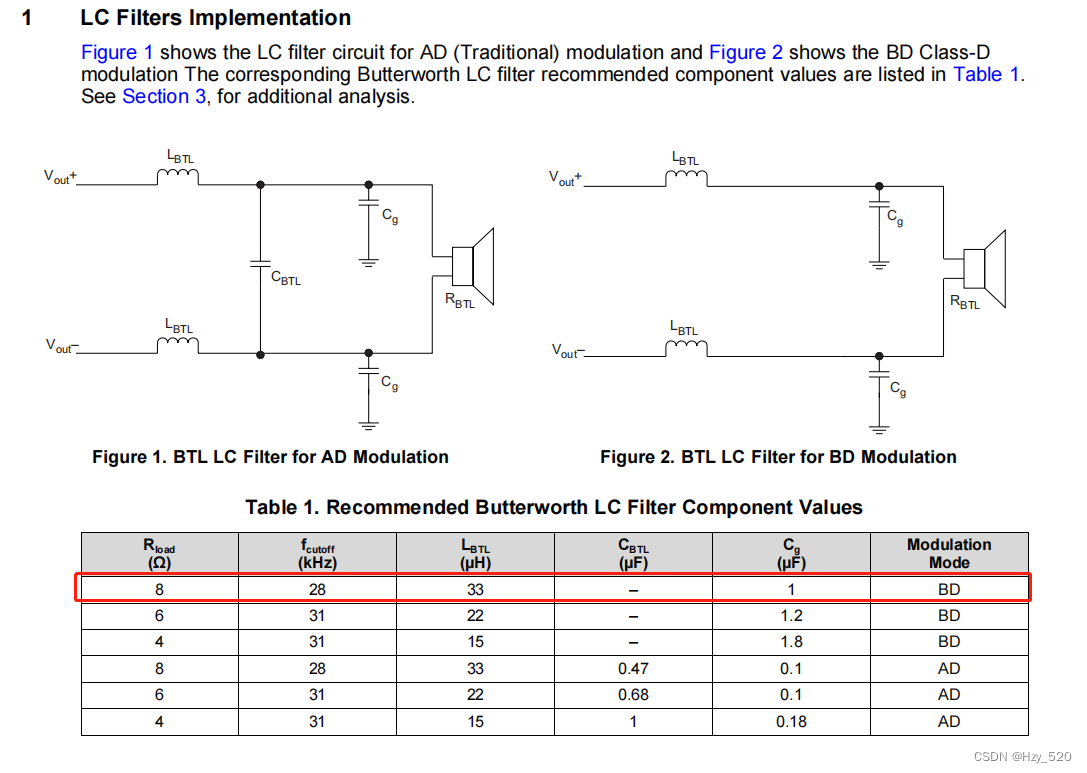
为什么D类音频功放可以免输出滤波器
[Arduino connected to GPS module (NEO-6M) to read positioning data]
单火线开关设计详解
Website development plan research
408-二叉树-先序中序后序层次遍历
开源日志库 [log4c] 使用
I2C无法访问ATEC508A加密芯片问题
Modify hosts file using batch script
idea中创建jsp项目详细步骤
移动云物联网预研及阿里云开发对比分析
【多线程】线程安全保护机制
使用Vercel托管自己的网站
Application of electronic flow on business trip
写博客的原因。
Personal image bed construction based on Alibaba Cloud OSS+PicGo
工业边缘网关究竟强大在哪里?
PCIE电路设计