当前位置:网站首页>基于PyTorch的flappy bird游戏
基于PyTorch的flappy bird游戏
2022-08-02 07:25:00 【 星云 】
运行效果
我手动最多打出10分,模型能打30多……
问题分析
- 时间不连续,最小单位为“帧”
- 状态status是连续的浮点数值
- 动作action只有2种,即“升”和“不升”,无论采取什么动作,都作用于玩家加速度而非直接改变位置
- 除了刚刚通过门时采取的动作外,动作的结果全是必然没有随机性
与玩家决策相关的量很多比如门(腔缝)的高度和宽度,飞机本身尺寸等等,具体要什么不要什么:
- 玩家左侧与门右侧水平距离占当前两门间距的比例
- 玩家中点与门中点垂直距离占总高度的比例
- 玩家y向速度与“最大速度”的比例
玩家中点与屏幕水平中线的距离占屏幕高度的一半的比例
我们最后用这3个量作为模型入参,所以模型输入3通道但输出只有2通道。只要玩家存活就得到正奖励。
环境搭建
- 安装CUDA
- CUDA版本:
nvcc --versionnvcc: NVIDIA (R) Cuda compiler driver Copyright (c) 2005-2021 NVIDIA Corporation Built on Sun_Feb_14_21:12:58_PST_2021 Cuda compilation tools, release 11.2, V11.2.152 Build cuda_11.2.r11.2/compiler.29618528_0 - Python版本:
python --versionPython 3.9.12 - 系统版本:
cat /proc/versionLinux version 5.4.0-109-generic ([email protected]) (gcc version 9.4.0 (Ubuntu 9.4.0-1ubuntu1~20.04.1)) #123-Ubuntu SMP Fri Apr 8 09:10:54 UTC 2022 - 安装依赖
pip install pygame autopep8 numpy pip install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu113
目录结构
- assets
- textures
- door.gif
- player_age0.gif
- player_age1.gif
- textures
- main.py
- game.py
- util.py
代码
main.py
# -*- coding: utf-8 -*-
"""训练和预测。 """
import random
import sys
from collections import OrderedDict
import numpy as np
import pygame
import torch
from torch import nn, optim
from game import Game
from util import print_bar
class Model(nn.Module):
"""Dueling DQN结构。 """
def __init__(self):
super(Model, self).__init__()
self.layers = nn.ModuleDict({
'c': nn.Sequential(nn.Linear(3, 12, device=CUDA), nn.Sigmoid()),
'a': nn.Linear(12, 2, device=CUDA),
'v': nn.Linear(12, 1, device=CUDA),
'o': nn.ReLU(),
})
def forward(self, arg: torch.Tensor) -> torch.Tensor:
"""模型前向传播。 Parameters ---------- x : torch.Tensor 样本输入模型 Returns ------- torch.Tensor 预测值。 """
output = arg
output = self.layers['c'](output)
adv = self.layers['a'](output)
val = self.layers['v'](output)
output = self.layers['o'](adv+val)
return output
def load_params(self, model: 'Model', rate: float = 1):
"""模型参数软更新。 Parameters ---------- model : Model 将这个模型的参数复制到当前模型 rate : float, optional `1`表示将模型参数完全复制到当前模型, by default 1 """
for key, value in self.layers.items():
if rate >= 1.:
forign = model.layers[key].state_dict()
value.load_state_dict(forign)
else:
local = value.state_dict()
forign = model.layers[key].state_dict()
mix = OrderedDict()
for key in local.keys():
mix[key] = local.get(key)*(1-rate) + forign.get(key)*rate
value.load_state_dict(mix)
def simulate(model: Model, batch_size: int, epslion: float = .1, eval_step: int = None, env_args: dict = None) -> 'tuple[list,float,int]':
"""模拟游戏过程并收集数据。 Parameters ---------- model : Model 决策用 batch_size : int 收集数据总条数 epslion : float, optional 尝试比例, by default .1 eval_step : int, optional 模型将控制游戏的最大步数,参与模型评估, by default `batch_size` env_args : dict, optional 环境初始化参数, by default None Returns ------- tuple[list,float,int] 采集的数据, 平均存活时长, 无探索情况下生存时间 """
cache = []
env = Game(**env_args, without_screen=True)
livetimes = []
livetime = 0
for _ in range(batch_size):
state = env.shot()
if random.random() <= epslion:
action_index = random.randint(0, len(ACTIONS)-1)
else:
values = model(torch.tensor(state, device=CUDA))
action_index = values.argmax(-1)
jump = ACTIONS[action_index]
env.step(jump)
next_state = env.shot()
reward = float(env.playing)
cache.append((state, action_index, next_state, reward))
if not env.playing:
env = Game(**env_args, without_screen=True)
livetimes.append(livetime)
else:
livetime += 1
env = Game(**env_args, without_screen=True)
max_step = eval_step or batch_size
livetime = 0
for _ in range(max_step): # 看模型在不进行随机探索条件下能维持多少帧不摔机,这是评估标准
state = env.shot()
values = model(torch.tensor(state, device=CUDA))
action_index = values.argmax(-1)
jump = ACTIONS[action_index]
env.step(jump)
if not env.playing:
break
livetime += 1
return cache, sum(livetimes)/max(1, len(livetimes))/batch_size, livetime
def train(policy_net: Model, opt: optim.Optimizer, loss_func: 'nn._Loss', epochs: int, batch_size: int, cache_size: int, epslion: float = .1, gamma: float = .5, update_ratio: float = .5, eval_step: int = None, target_accuracy=.99, env_args: dict = None) -> 'tuple[Model,list[float],list[float],list[int]]':
"""训练模型。 Parameters ---------- policy_net : Model 决策网络对象 opt : optim.Optimizer 优化器 loss_func : nn._Loss 损失函数 epochs : int 迭代轮数 batch_size : int 批量 epslion : float, optional 探索动作比例, by default .1 gamma : float, optional 未来奖励权重,`0`表示仅考虑当前奖励, by default .5 update_ratio : float, optional 软更新比例, by default .5 target_accuracy : float, optional 模型决策目标得分, by default .99 env_args : dict, optional 环境初始化参数, by default None Returns ------- tuple[Model,list[float],list[float],list[int]] 目标网络, 损失, 存活时间 """
target_net = Model()
target_net.load_params(policy_net)
policy_net.train(mode=True)
target_net.train(mode=False)
loss_vals, accuracies, livetimes, cache = [], [], [], []
for epoch in range(epochs):
target_net.load_params(policy_net, update_ratio)
# 获取数据
batch, accuracy, livetime = simulate(model=target_net, batch_size=batch_size, epslion=epslion, eval_step=eval_step, env_args=env_args)
accuracies.append(accuracy)
livetimes.append(livetime)
if livetime/(eval_step or batch_size) >= target_accuracy:
# 模型的决策已经达标不需要再训练了
break
# 装入经验池
cache.extend(batch)
cache = cache[-cache_size:]
# 经验池抽样并转换成tensor
states, actions, nexts, rewards = [], [], [], []
for state, action, next_state, reward in random.sample(cache, batch_size):
states.append(state)
actions.append(action)
rewards.append(reward)
nexts.append(next_state)
states = torch.tensor(states, device=CUDA)
actions = torch.tensor(actions, device=CUDA).unsqueeze(-1)
rewards = torch.tensor(rewards, device=CUDA)
nexts = torch.tensor(nexts, device=CUDA)
# 计算输出与损失,批量梯度下降
v_target = target_net.forward(nexts).detach()
y_target = v_target.max(dim=-1).values * gamma
y_target += rewards * (1-gamma)
v_eval = policy_net.forward(states)
y_eval = v_eval.gather(index=actions, dim=-1)
loss = loss_func(y_eval, y_target)
opt.zero_grad()
loss.backward()
opt.step()
loss = loss.item()
loss_vals.append(loss)
print_bar(epoch+1, epochs, ("%.10f" % loss, '%.10f' % accuracy, livetime))
return target_net, loss_vals, accuracies, livetimes
np.set_printoptions(suppress=True)
CUDA = torch.device("cuda")
MODEL = Model()
OPT = optim.Adam(MODEL.parameters(), lr=.01)
LOSS_FUNCTION = nn.MSELoss()
ACTIONS = (True, False)
SCREEN_SIZE = (800, 600)
FPS = 20
GAME_CONFIG = {
'screen_size': SCREEN_SIZE,
'door_size': (80, 180),
'speed': 10,
'jump_force': 3,
'g': 2,
'door_distance': 60,
}
if __name__ == "__main__":
pygame.init() # 初始化
model, loss_vals, accuracies, livetimes = train(
policy_net=MODEL,
opt=OPT,
loss_func=LOSS_FUNCTION,
epochs=20000,
batch_size=192,
cache_size=2000,
epslion=.3,
gamma=.9,
update_ratio=.1,
target_accuracy=.95,
env_args=GAME_CONFIG,
eval_step=1200,
)
# 使用模型决策并观看结果
print('\n\n')
model = model.to('cpu')
model.train(mode=False)
SCREEN = pygame.display.set_mode(SCREEN_SIZE)
fcclock = pygame.time.Clock()
game = Game(**GAME_CONFIG)
while True:
# 循环,直到接收到窗口关闭事件
for event in pygame.event.get():
# 处理事件
if event.type == pygame.QUIT:
# 接收到窗口关闭事件
pygame.quit()
sys.exit()
keys = pygame.key.get_pressed()
if keys[pygame.K_ESCAPE]:
pygame.quit()
sys.exit()
else:
state = torch.tensor(game.shot())
values = model.forward(state)
action_index = values.argmax(-1)
jump = ACTIONS[action_index]
game.step(jump)
pygame.display.set_caption(f'SCORE: {
game.score}')
game.draw(SCREEN)
fcclock.tick(FPS)
pygame.display.update()
if not game.playing:
# 自动开局
game = Game(**GAME_CONFIG)
game.py
# -*- coding: utf-8 -*-
"""游戏环境相关。 """
import random
import sys
import pygame
class Box:
"""包含基础位置、尺寸、速度、加速度的盒子类。 """
__position = None
__size = None
__speed = None
__acceleration = None
def __init__(self, cx: int, cy: int, w: int, h: int, sx: int = 0, sy: int = 0, ax: int = 0, ay: int = 0):
self.__position = [cx, cy]
self.__size = [w, h]
self.__speed = [sx or 0, sy or 0]
self.__acceleration = [ax or 0, ay or 0]
@property
def width(self):
return self.__size[0]
@property
def height(self):
return self.__size[-1]
@property
def size(self):
return self.__size
@property
def x(self):
return self.__position[0]
@property
def y(self):
return self.__position[-1]
@property
def position(self):
return self.__position
@property
def speed_x(self):
return self.__speed[0]
@speed_x.setter
def speed_x(self, v):
self.__speed[0] = v
@property
def speed_y(self):
return self.__speed[-1]
@speed_y.setter
def speed_y(self, v):
self.__speed[-1] = v
@property
def speed(self):
return self.__speed
@speed.setter
def speed(self, v: 'tuple[int,int]'):
self.__speed[0] = v[0]
self.__speed[-1] = v[-1]
@property
def acceleration_x(self):
return self.__acceleration[0]
@acceleration_x.setter
def acceleration_x(self, v: int):
self.__acceleration[0] = v
@property
def acceleration_y(self):
return self.__acceleration[-1]
@acceleration_y.setter
def acceleration_y(self, v: int):
self.__acceleration[-1] = v
@property
def acceleration(self):
return self.__acceleration
@acceleration.setter
def acceleration(self, v: 'tuple[int,int]'):
self.__acceleration[0] = v[0]
self.__acceleration[-1] = v[-1]
@property
def left(self):
return self.x-self.width/2
@property
def right(self):
return self.x+self.width/2
@property
def top(self):
return self.y-self.height/2
@property
def bottom(self):
return self.y+self.height/2
def move(self, force_x: int = None, force_y: int = None):
"""为盒子施力使其移动。 Parameters ---------- force_x : int, optional 水平分量, by default None force_y : int, optional 垂直分量, by default None """
self.acceleration_x = force_x or 0
self.acceleration_y = force_y or 0
self.speed_x += self.acceleration_x
self.speed_y += self.acceleration_y
self.__position[0] += self.speed_x
self.__position[-1] += self.speed_y
def is_intersect(player: Box, door: Box) -> bool:
return (door.top > player.top or player.bottom > door.bottom) \
and not (player.left >= door.right or door.left >= player.right)
class GameObject(Box):
"""游戏基础对象。 """
def __init__(self, imgs: list, img_cd: int = 1, *args, **kwargs):
super(GameObject, self).__init__(*args, **kwargs)
self.__imgs = [item for item in imgs]
self.__img_cd = img_cd or -1
self.living = True
self.img_index = -1
def img_grow(self):
self.img_index = (self.img_index+1) % self.__img_cd
@property
def img(self):
return self.__imgs[self.img_index]
class Game:
door_size = None
player = None
jump_force = 0
g = 1
door_distance = 0
doors = None
time = 1
score = 0
def __init__(self, screen_size=(800, 600), player_size=(160, 80), door_size=(80, 160), speed=5, jump_force=1.3, g=0.4, door_distance=100, max_falling_speed: int = 100, without_screen=False, **_):
self.player = GameObject(
cx=screen_size[0]/4,
cy=screen_size[1]/2,
w=player_size[0],
h=player_size[1],
sx=0, sy=0,
ax=0, ay=g,
imgs=[None, ] if without_screen else[
pygame.image.load('./assets/textures/player_age0.gif').convert_alpha(),
pygame.image.load('./assets/textures/player_age1.gif').convert_alpha(),
],
img_cd=2
)
self.without_screen = without_screen
self.screen_size = screen_size
self.door_size = door_size
self.speed = speed
self.jump_force = jump_force
self.g = g
self.door_distance = door_distance
self.max_falling_speed = max_falling_speed
self.doors = [self.create_door()]
@property
def playing(self) -> bool:
"""描述玩家是否存活。 """
return self.player.living
@property
def door(self) -> 'GameObject|None':
"""距离玩家最近的且玩家未穿过的门。 """
for door in self.doors:
if door.right >= self.player.left:
return door
return None
def create_door(self) -> GameObject:
"""随机初始化门。 Returns ------- GameObject 屏幕右侧随机位置的门。 """
door = GameObject(
cx=self.screen_size[0]+self.door_size[0]/2,
cy=random.randint(self.door_size[1]/2, self.screen_size[1]-self.door_size[1]/2),
w=self.door_size[0],
h=self.door_size[1],
sx=-self.speed,
imgs=[None, ] if self.without_screen else [pygame.image.load('./assets/textures/door.gif').convert_alpha(),],
img_cd=2
)
return door
def draw(self, surface: 'pygame.Surface'):
"""绘制游戏帧。 Parameters ---------- surface : pygame.Surface pygame屏幕 """
if not self.player.living:
return
surface.fill([86, 92, 66])
self.player.img_grow()
surface.blit(pygame.transform.scale(self.player.img, (self.player.width, self.player.height)), (self.player.left, self.player.top))
for door in self.doors:
surface.blit(pygame.transform.scale(door.img, (door.width, door.top)), (door.left, 0))
surface.blit(pygame.transform.scale(door.img, (door.width, self.screen_size[1]-door.bottom)), (door.left, door.bottom))
@staticmethod
def __shot(door: Box, player: Box, screen_size: 'tuple[int,int]', speed_scale: int) -> 'list[float]':
return [(door.right-player.left)/screen_size[0], (player.y-door.y)/screen_size[-1], player.speed_y/speed_scale, ]
def shot(self) -> 'list[float]':
"""组装并返回当前游戏环境状态。 Returns ------- list[float] 模型所需的多元组。 """
return Game.__shot( self.door, self.player, [self.door_distance*self.speed, self.screen_size[-1]], self.max_falling_speed, )
def step(self, jump: 'bool|int|float' = False):
"""游戏步进。 Parameters ---------- jump : bool, optional 玩家是否跳跃, by default False """
# 玩家必须存活才能继续游戏
if not self.player.living:
return
if self.time % self.door_distance == 0 or not (self.doors and len(self.doors)):
# 时间间隔生成门,时间重置
self.doors.append(self.create_door())
self.time = 1
else:
# 时间正常递增直到时间间隔
self.time += 1
# 清除已经移除屏幕的门
while self.doors[0].right < 0:
del self.doors[0]
# 移动玩家和所有门
for door in self.doors:
door.move()
door = self.door
living = 0 < self.player.y < self.screen_size[1] and not is_intersect(self.player, door)
self.player.move(None, -self.jump_force if jump else self.g)
if jump:
self.player.speed_y = min(0, self.player.speed_y)
self.player.living = living
# 判断玩家和门存活
if door.living and self.player.left >= door.right:
door.living = False
self.score += 1
util.py
# -*- coding: utf-8 -*-
"""输出打印工具模块。 """
def print_bar(epoch, epochs, etc=None, bar_size=50):
"""打印进度条。 Parameters ---------- epoch : int 当前进度 epochs : int 总进度 etc : Any, optional 打印后缀, by default None bar_size : int, optional 进度条长度, by default 50 """
process = bar_size*epoch/epochs
process = int(process+(int(process) < process))
strs = [
f"Epoch {
epoch}/{
epochs}",
f" |\033[1;30;47m{
' ' * process}\033[0m{
' ' * (bar_size-process)}| ",
]
if etc is not None:
strs.append(str(etc))
if epoch:
strs.insert(0, "\033[A")
print("".join(strs)+" ")
door.gif

player_age0.gif

player_age1.gif

边栏推荐
猜你喜欢

停止精神内耗 每日分享
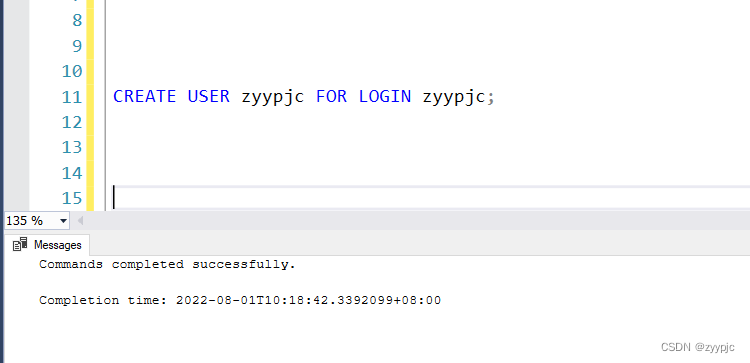
Azure Synapse Analytics上创建用户并赋予权限
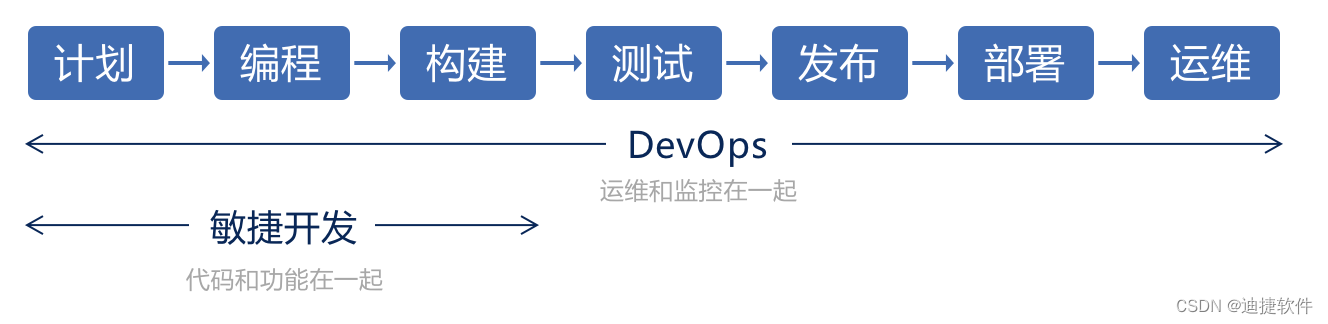
Agile, DevOps and Embedded Systems Testing

DeadLock的可视化分析

MySQL-基础
HCIP第三天

Understand the Chisel language. 30. Chisel advanced communication state machine (2) - FSMD: Take Popcount as an example
Comprehensive experiment of MPLS and BGP

研发创新编码器霍尔板,引领企业高质量发展

论文理解:“Cross-Scale Residual Network: A GeneralFramework for Image Super-Resolution,Denoising, and “
随机推荐
postgres groupby 合并字符串
Mysql error 2003 solution Can 't connect to Mysql server on' localhost '(10061).
Compact格式下MySQL的数据如何存储到磁盘
静态路由综合实验
Please tell me, how to write Flink SQL and JDBC sink into mysql library and want to create an auto-incrementing primary key
mysql操作入门(四)-----数据排序(升序、降序、多字段排序)
Chain Of Responsibility
flutter在导航栏处实现对两个列表的点击事件
Inverter insulation detection detection function and software implementation
Install Metasploitable2 on VMware
Ask a question, my Flinkcdc has run through, I can monitor the binlog of msql, and I can also send kafk
Conditional constructor ~wapper
数据中心的网络安全操作规范
HCIP 第十三天
HCIP第七天
研发过程中的文档管理与工具
Azure Synapse Analytics上创建用户并赋予权限
Inverter Phase Locking Principle and DSP Implementation
MySQL-数据库设计规范
pnpm install出现:ERR_PNPM_PEER_DEP_ISSUES Unmet peer dependencies