当前位置:网站首页>STM32 GPIO LED和蜂鸣器实现【第四天】
STM32 GPIO LED和蜂鸣器实现【第四天】
2022-08-03 15:45:00 【红客白帽】
STM32 GPIO LED实现
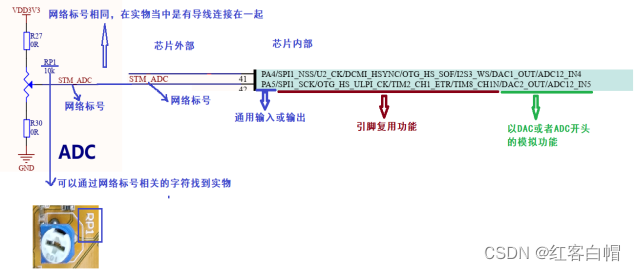
原理图
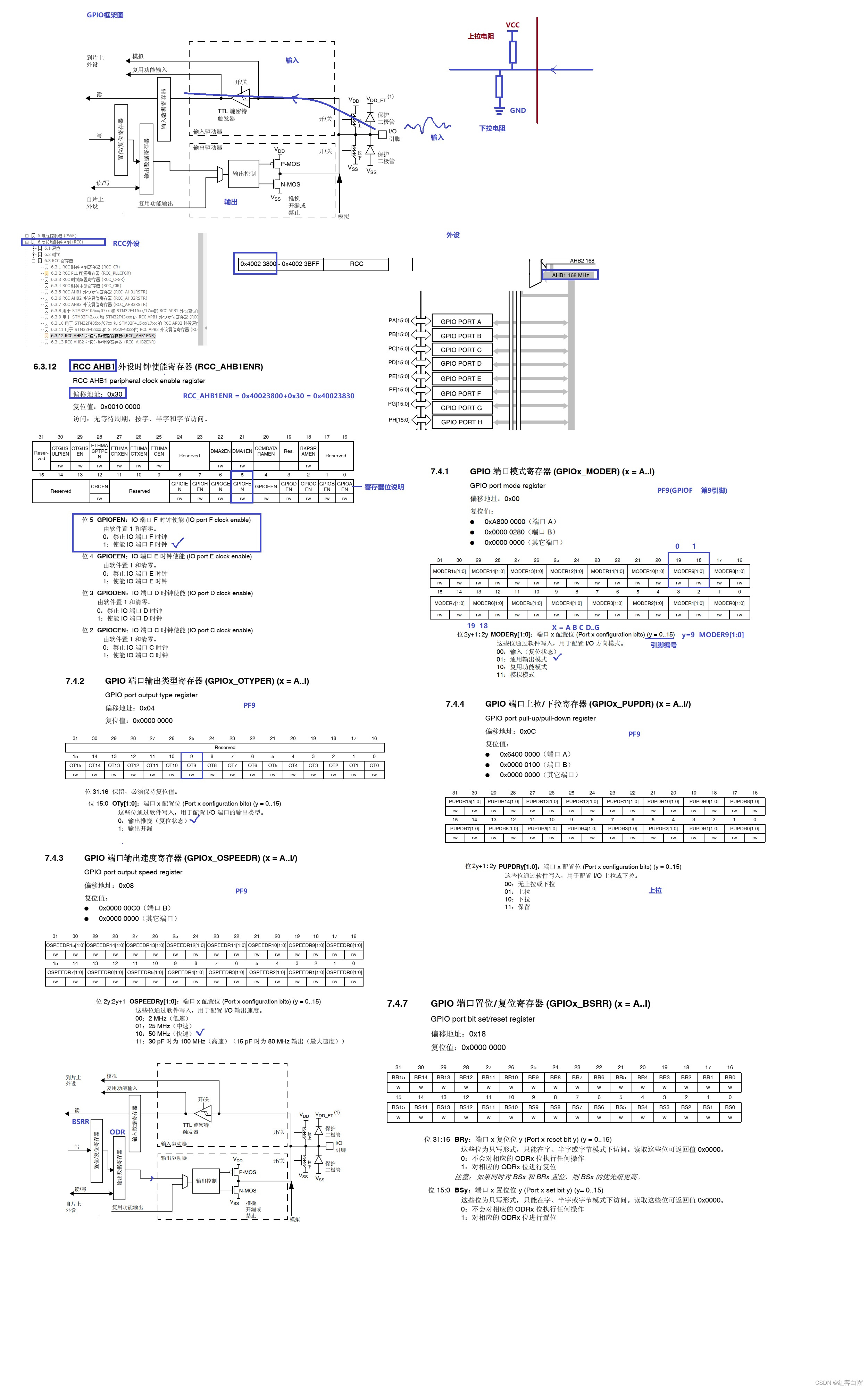
寄存器总图
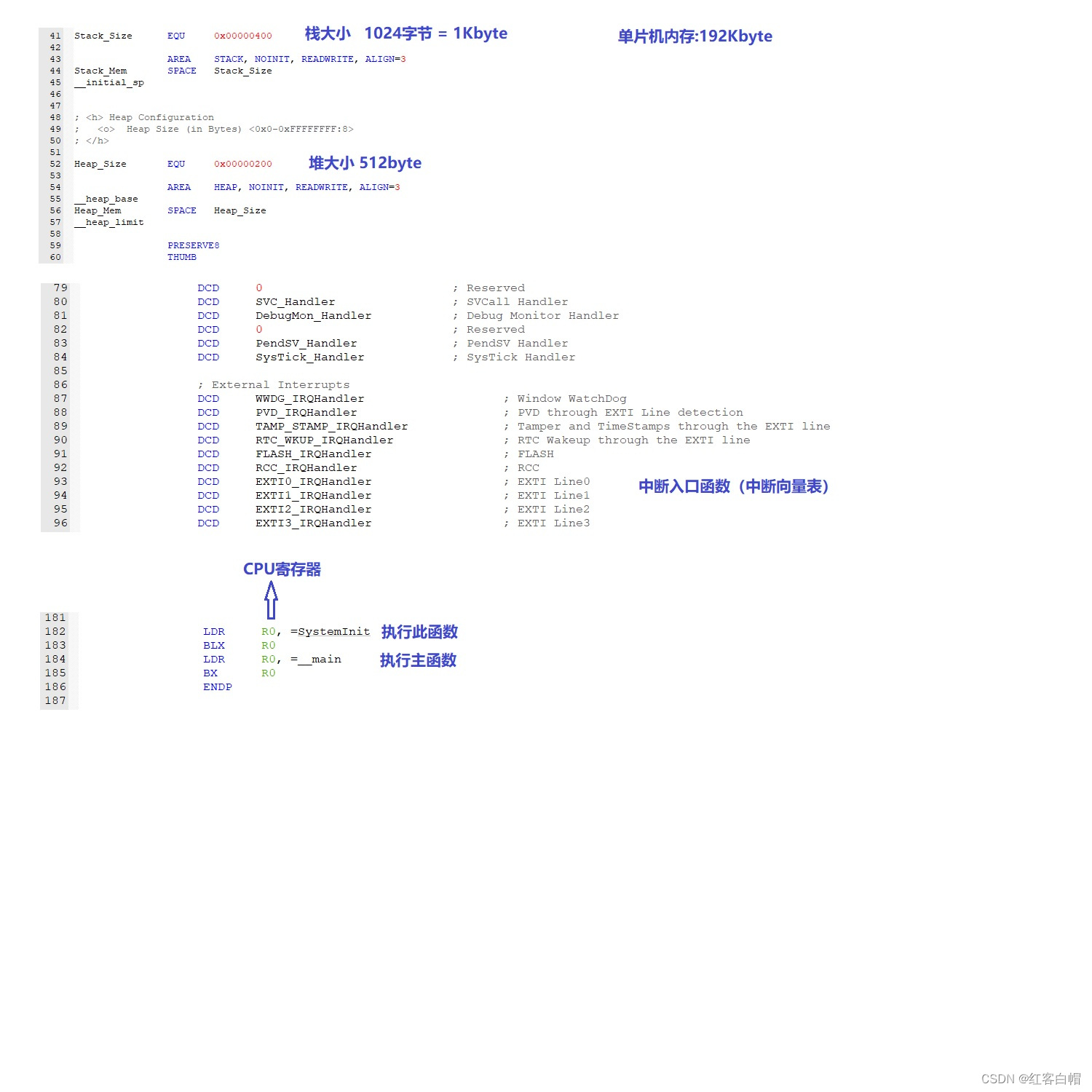
启动 汇编
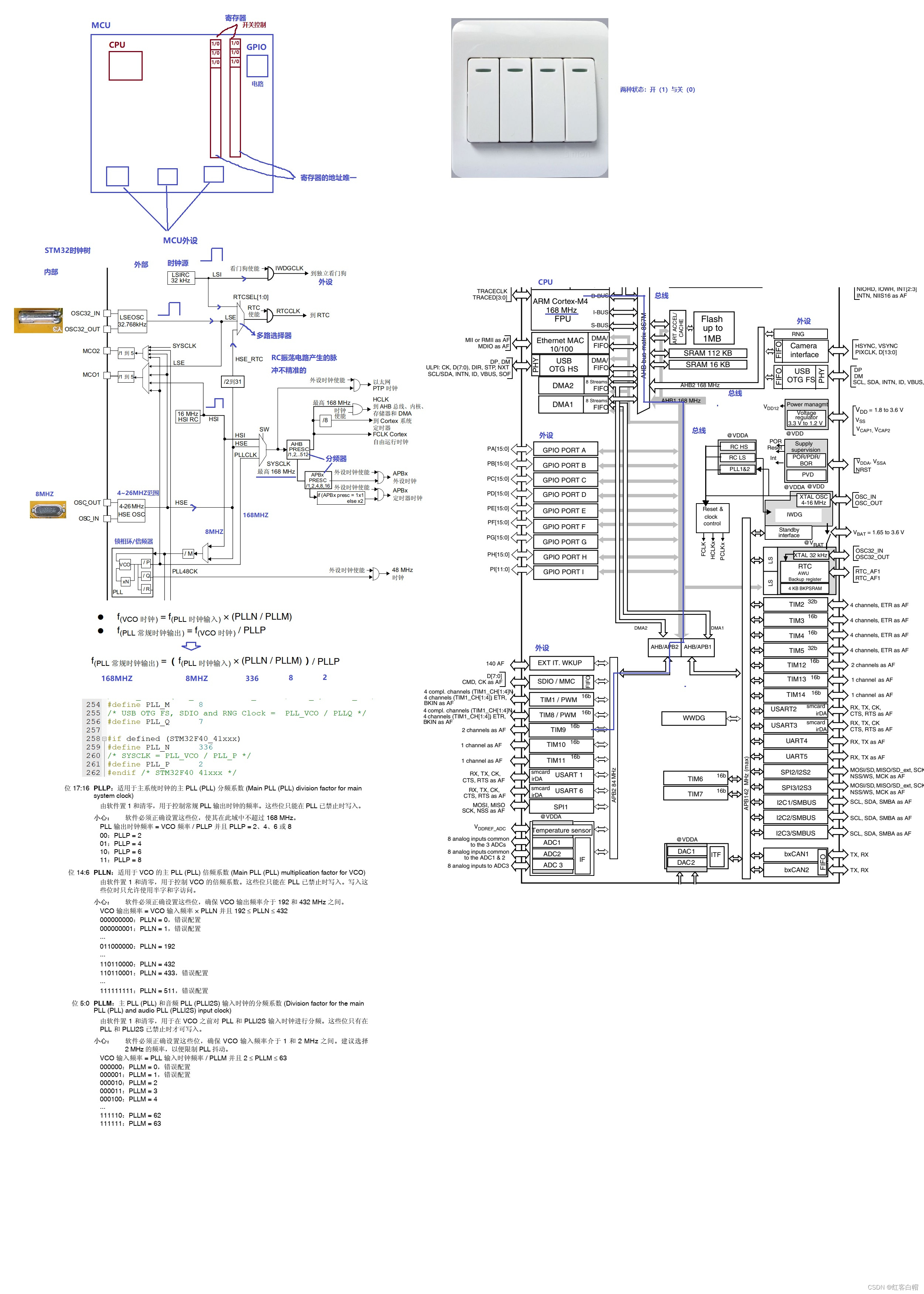
时钟树
一 、STM32大小说明
栈大小:1024Kbyte
堆大小:512byte
单片机内存:192Kbyte CPU -> 寄存器->R0 =systemInit :初始化函数(配置) ->main执行主函数
二、STM32时钟分析
寄存器:寄存器的功能是存储二进制代码,它是由具有存储功能的触发器组合起来构成的。一个触发器可以存储1位二进制代码,故存放n位二进制代码的寄存器,需用n个触发器来构成 在计算机领域,寄存器是CPU内部的元件,包括通用寄存器、专用寄存器和控制寄存器。寄存器拥有非常高的读写速度,所以在寄存器之间的数据传送非常快。
MCU: 微控制单元(MCU) ,又称单片微型计算机或者单片机,是把中央处理器(CPU)的频率与规格做适当缩减,并将
内存(memory)、计数器(Timer)、 USB、A/D转换、UART(通用异步收发传输器)、PLC(可编程逻辑控制器)、 DMA(直接内存访问)等周边接口,甚至LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。
控制寄存器:相当一排可通过0/1进行设置外设功能的开关,程序中通过地址查找到对应的寄存器,所以说控制寄存器的地址是唯一。
芯片时钟:芯片工作时,是需要脉冲,脉冲相当于给芯片起振,可保证芯片的正常工作,类似于人,心脏正常跳动,人体生命特征才能正常。
1HZ:一秒产生1个脉冲
频率换算单位:
1GHZ = 1000MHZ = 1000 000KHZ = 1000 000 000HZ
STM32时钟源: 时钟源是可以产生器件。
LSIRC 32KHZ 32 kHz 低速内部 RC (LSIRC)
LSEOSC 32.168KHZ 32.768 kHz 低速外部晶振( LSE 晶振)
HSIRC 16MHZ 16MHZ 高速内部 RC (LSIRC)
HSEOSC 4-26MHZ 4-26MHZ高速外部晶振(HSE 晶振)
粤嵌开发板外部晶振为8MHZ
STM32主要总线时钟频率
SYSCLK 168MHZ
HCLK 168MHZ
AHB1/AHB2 168MHZ
APB1 42MHZ
APB2 84MHZ
三、GPIO分析
GPIO: GPIO(英语:General-purpose input/output),通用型之输入输出) GPIO分组
STM32F407ZET6(芯片型号)
- 一共有7组IO口(PA PB PC PD PE PF PG)
- 每组IO口有16个IO引脚
- 一共16X7=112个IO引脚
外加2个PH0和PH1
一共114个IO口引脚(I:input O:output) IO引脚口:114
每组(PA PB PC PD PE PF PG)通用 I/O 端口包括:
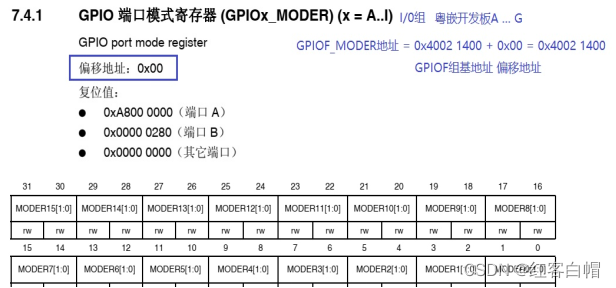
•4 个 32 位配置寄存器(GPIOx_MODER、GPIOx_OTYPER、GPIOx_OSPEEDR 和 GPIOx_PUPDR)。
•2 个 32 位数据寄存器(GPIOx_IDR 和 GPIOx_ODR)。
•1 个 32 位置位/复位寄存器 (GPIOx_BSRR)、
•1 个 32 位锁定寄存器(GPIOx_LCKR)
•2 个 32 位复用功能选择寄存器(GPIOx_AFRH 和 GPIOx_AFRL)。(高 低)
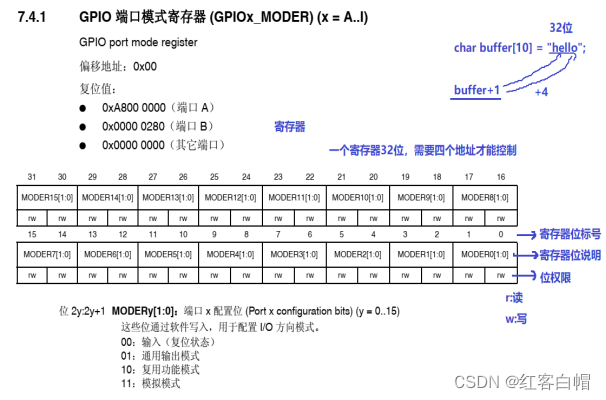
GPIO工作方式(寄存器设置GPIO工作方式)
4种输入模式
`浮空输入(没有上下拉电阻) 上拉输入(有上拉电阻) 下拉输入(有下拉电阻) 模拟输入`
4种输出模式
`开漏输出(带上拉或者下拉) 开漏复用功能(带上拉或者下拉) 推挽式输出(带上拉或者下拉) 推挽是复用功能(带上拉或者下拉)`
4种最大输出速度
`2MHZ 25MHZ 50MHZ 100MHZ`
1.注意点
开漏输出只能输出0(低电平),若想出输出1(高电平),需要外部接上拉电阻(类似到51单片机P0组)。
推挽式输出可输出0(低电平)或者1(高电平),这是常用模式
四、寄存器地址查找
寄存器地址 = 寄存组基地址+偏移地址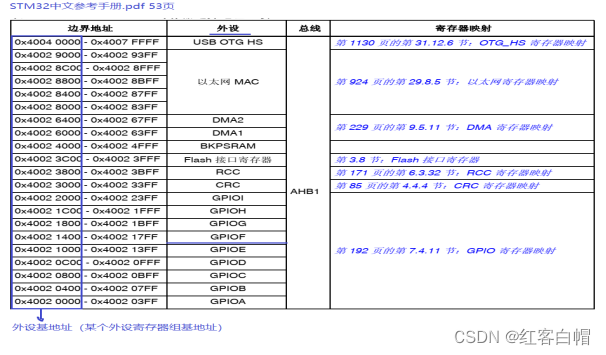
1、写出GPIOF外设的所有寄存器地址
GPIOF_MODER = 0x42001400 + 0x00 = 0x40021400
GPIOF_OTYPER = 0x42001400 + 0x04 = 0x40021404
GPIOF_OSPEEDR = 0x42001400 + 0x08 = 0x40021408
GPIOF_PUPDR = 0x42001400 + 0x0C = 0x4002140C
GPIOF_IDR = 0x42001400 + 0x10 = 0x40021410
GPIOF_ODR = 0x42001400 + 0x14 = 0x40021414
GPIOF_BSRR = 0x42001400 + 0x18 = 0x40021418
GPIOF_LCKR = 0x42001400 + 0x1C = 0x4002141C
GPIOF_AFRL = 0x42001400 + 0x20 = 0x40021420
GPIOF_AFRH = 0x42001400 + 0x24 = 0x4002142C
五、LED灯开发
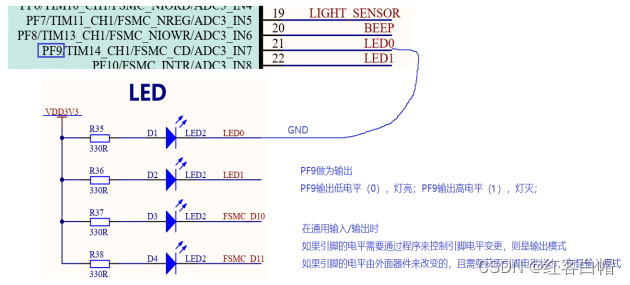
1、理解led灯原理图
LED0连接在PF9
PF9输出低电平(0), 灯亮;
PF9输出高电平(1),灯灭;
2、打开GPIOF组时钟
//将第5位置1 使能GPIOF组时钟 RCC_AHB1ENR |= (0x01<<5);
设置PF9灯为输出模式 输出推挽上拉速度(50MHZ)
4、通过GPIOF_BSRR控制LED灯亮与灭
举例:
① 寄存器实现函数lcd.h RCC_AHB1ENR
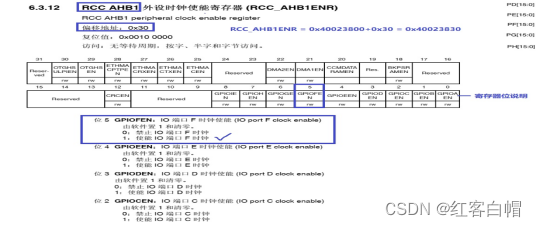
5.设置时钟
#define RCC_AHB1ENR (*((unsigned int *)(0x40023800+0x30)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
设置端口模式 2y+1:2y y=寄存器的PFy
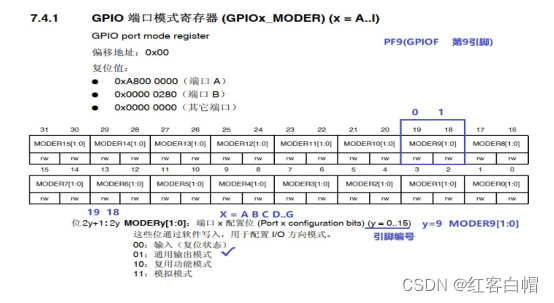
#define GPIOF_MODER (*((unsigned int *)(0x40021400+0x00)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值 //板子灯:D1 D2
#define GPIOE_MODER (*((unsigned int *)(0x40021000+0x00)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值 //板子灯:D3 D4
6.设置输出类型
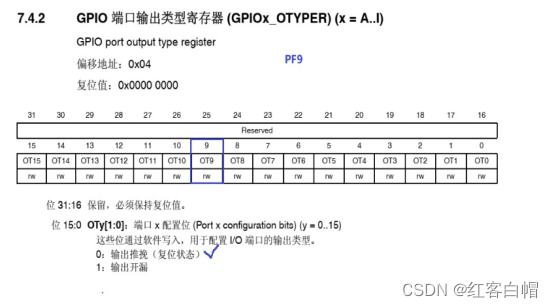
#define GPIOF_OTYPER (*((unsigned int *)(0x40021400+0x04)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OTYPER (*((unsigned int *)(0x40021000+0x04)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
设置端口速度 2y:2y+1 y=要配置的操作位
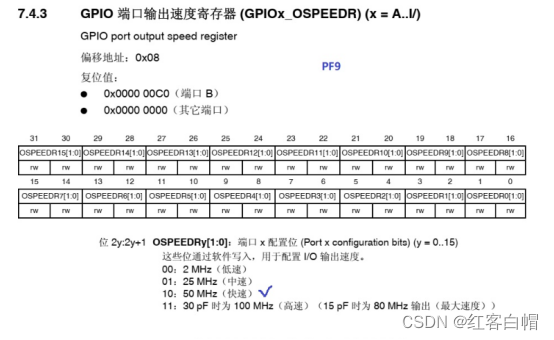
#define GPIOF_OSPEEDR (*((unsigned int *)(0x40021400+0x08)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OSPEEDR (*((unsigned int *)(0x40021000+0x08)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
7.设置上拉电阻
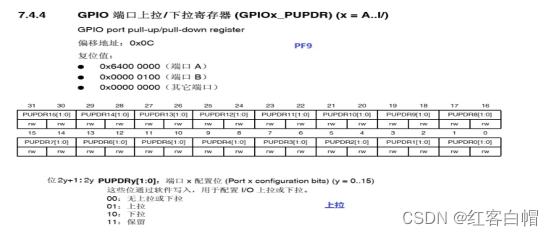
#define GPIOF_PUPDR (*((unsigned int *)(0x40021400+0x0C)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_PUPDR (*((unsigned int *)(0x40021000+0x0C)))
//值强制类型转为地址,通过地址解引用,访问地址空间的值
GPIOF_BSRR设置输出控制
#define GPIOF_ODR (*((unsigned int *)(0x40021400+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_ODR (*((unsigned int *)(0x40021000+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
GPIOF_BSRR设置控制位 灯亮和蜂鸣器
#define GPIOF_BSRR (*((unsigned int *)(0x40021400+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_BSRR (*((unsigned int *)(0x40021000+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
举例
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx.h"
//设置时钟
#define RCC_AHB1ENR (*((unsigned int *)(0x40023800+0x30))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_MODER (*((unsigned int *)(0x40021400+0x00))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_OTYPER (*((unsigned int *)(0x40021400+0x04))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_OSPEEDR (*((unsigned int *)(0x40021400+0x08))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_PUPDR (*((unsigned int *)(0x40021400+0x0C))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_ODR (*((unsigned int *)(0x40021400+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_BSRR (*((unsigned int *)(0x40021400+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_MODER (*((unsigned int *)(0x40021000+0x00))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OTYPER (*((unsigned int *)(0x40021000+0x04))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OSPEEDR (*((unsigned int *)(0x40021000+0x08))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_PUPDR (*((unsigned int *)(0x40021000+0x0C))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_ODR (*((unsigned int *)(0x40021000+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_BSRR (*((unsigned int *)(0x40021000+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
void Led_Init(void);
//分别初始化各个D1 -- D4的灯函数
void Led0(void);
void Led1(void);
void Led2(void);
void Led3(void);
void Beep(void); //蜂鸣器
#endif
② 寄存器实现函数lcd.c
void Led0() //针对D1 D2灯 GPIOF_XXXX形式
{
//设置GPIOF9为输出模式
GPIOF_MODER &= ~(0x01<<19); //19位清0
GPIOF_MODER |= (0x01<<18); //18位置1
//设置GPIOF9为输出推挽
GPIOF_OTYPER &= ~(0x01<<9); //9位清0
//设置GPIOF9为上拉
GPIOF_PUPDR &= ~(0x01<<19); //19位清0
GPIOF_PUPDR |= (0x01<<18); //18位置1
//设置GPIOF9输出速度50MHZ
GPIOF_OSPEEDR |= (0x01<<19); //19位置1
GPIOF_OSPEEDR &= ~(0x01<<18); //18位清0
}
//***************************************************************************************
void Led2() //针对D1 D2灯 GPIOE_XXXX形式
{
//设置GPIOF13为输出模式
GPIOE_MODER &= ~(0x01<<27); //27位清0
GPIOE_MODER |= (0x01<<26); //26位置1
//设置GPIOE输出速度为50MHZ
GPIOE_OSPEEDR |= (0x01<<26); //26位置1
GPIOE_OSPEEDR &= ~(0x01<<27); //27为清0
//设置GPIOE为上拉
GPIOE_PUPDR &= ~(0x01<<27); //27位清0
GPIOE_PUPDR |= (0x01<<26); //26位置1
//设置GPIOE为输出推挽
GPIOE_OTYPER &= ~(0x01<<13); //13位清0
}
解释:模式 速度 上拉 操作的对应位
D1(19 - 18位) D2 (21 -20):设置相关参数
D3(27 - 26位) D4 (29 -28):设置相关参数
解释:推挽 GPIOF_OTYPER 操作的对应位0
D1(9位清0) D2 (10位清0)
D3(13位清0) D4 (14位清0)
③ 寄存器实现函数main.c GPIOX_BSRR->ODR
板子:D1 --D2灯 GPIOF_BSRR
` BSRR 25位置1 ODR输出0 Led0灯亮 D1亮 BSRR 9位置1 ODR输出1 Led0灯灭 D1灭 BSRR 26位置1 ODR输出0 Led1灯亮 D2亮 BSRR 10位置1 ODR输出1 Led1灯灭 D2灭 `
板子:D3 --D4灯 GPIOE_BSRR
` BSRR 29位置1 ODR输出0 Led2灯亮 D3亮 BSRR 13位置1 ODR输出1 Led2灯灭 D3灭 BSRR 30位置1 ODR输出0 Led3灯亮 D4亮 BSRR 14位置1 ODR输出1 Led3灯灭 D4灭 `
六、蜂鸣器
蜂鸣器位的控制 复位和置位BSRR
` //BSRR 24位置1 ODR输出0 蜂鸣器关 GPIOE_BSRR |= (0x01<<24); //BSRR 8位置1 ODR输出1 蜂鸣器开 GPIOE_BSRR |= (0x01<<8); `
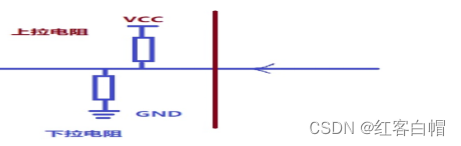
七、问题上、下拉电阻作用
> 1、请解释上、下拉电阻作用
上拉就是将不确定的信号通过一个电阻钳位在高电平,电阻同时起限流作用。【灌电流】
1、当TTL电路驱动CMOS电路时,如果电路输出的高电平低于CMOS电路的最低高电平(一般为3.5V),
这时就需要在TTL的输出端接上拉电阻,以提高输出高电平的值。U=IR 2、OC门电路必须使用上拉电阻,以提高输出的高电平值。
3、为增强输出引脚的驱动能力,有的单片机管脚上也常使用上拉电阻。
4、在CMOS芯片上,为了防止静电造成损坏,不用的管脚不能悬空,一般接上拉电阻以降低输入阻抗, 提供泄荷通路。
5、芯片的管脚加上拉电阻来提高输出电平,从而提高芯片输入信号的噪声容限,增强抗干扰能力。
6、提高总线的抗电磁干扰能力,管脚悬空就比较容易接受外界的电磁干扰。
7、长线传输中电阻不匹配容易引起反射波干扰,加上、下拉电阻是电阻匹配,有效的抑制反射波干扰。
下拉电阻是直接接到地上,接二极管的时候电阻末端是低电平。【拉电流】
1、提高电压准位 同时管脚悬空就比较容易接受外界的电磁干扰。
2、电阻匹配,抑制反射波干扰:长线传输中电阻不匹配容易引起反射波干扰,加上下拉电阻是电阻匹配,有效的抑制反射波干扰。
3、预设空间状态/缺省电位:在一些 CMOS 输入端接上或下拉电阻是为了预设缺省电位。 当你不用这些引脚的时候, 这些输入端下拉接 0
或上拉接 1。在I2C总线等总线上,空闲时的状态是由上下拉电阻获得
4、提高芯片输入信号的噪声容限:输入端如果是高阻状态,或者高阻抗输入端处于悬空状态,此时需要加上拉或下拉,以免收到随机电平而影响电路工作。
七、流水灯代码
MAIN.C
#include "stm32f4xx.h"
#include "led.h"
void delay(int n)
{
int i,j;
for(i=0; i<n; i++)
for(j=0; j<30000; j++);
}
int main(void)
{
Led_Init(); //初始化led
while(1)
{
//BSRR 25位置1 ODR输出0 Led0灯亮
GPIOF_BSRR |= (0x01<<25);
delay(1000);
//BSRR 9位置1 ODR输出1 灯灭
GPIOF_BSRR |= (0x01<<9);
//delay(1000);
//BSRR 26位置1 ODR输出0 Led1灯亮
GPIOF_BSRR |= (0x01<<26);
delay(1000);
//BSRR 10位置1 ODR输出1 灯灭
GPIOF_BSRR |= (0x01<<10);
//delay(1000);
//BSRR 29位置1 ODR输出0 Led2灯亮
GPIOE_BSRR |= (0x01<<29);
delay(1000);
//BSRR 13位置1 ODR输出1 灯灭
GPIOE_BSRR |= (0x01<<13);
//delay(1000);
//BSRR 30位置1 ODR输出0 Led3灯亮
GPIOE_BSRR |= (0x01<<30);
delay(1000);
//BSRR 14位置1 ODR输出1 灯灭
GPIOE_BSRR |= (0x01<<14);
delay(1000);
}
return 0;
}
LED.H
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx.h"
//设置时钟
#define RCC_AHB1ENR (*((unsigned int *)(0x40023800+0x30))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_MODER (*((unsigned int *)(0x40021400+0x00))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_OTYPER (*((unsigned int *)(0x40021400+0x04))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_OSPEEDR (*((unsigned int *)(0x40021400+0x08))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_PUPDR (*((unsigned int *)(0x40021400+0x0C))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_ODR (*((unsigned int *)(0x40021400+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_BSRR (*((unsigned int *)(0x40021400+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_MODER (*((unsigned int *)(0x40021000+0x00))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OTYPER (*((unsigned int *)(0x40021000+0x04))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OSPEEDR (*((unsigned int *)(0x40021000+0x08))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_PUPDR (*((unsigned int *)(0x40021000+0x0C))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_ODR (*((unsigned int *)(0x40021000+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_BSRR (*((unsigned int *)(0x40021000+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
void Led_Init(void);
//分别初始化各个D1 -- D4的灯函数
void Led0(void);
void Led1(void);
void Led2(void);
void Led3(void);
//void Beep(void);
#endif
LED.C
#include "led.h"
void Led_Init(void)
{
//将第5位置1 使能GPIOF组时钟
RCC_AHB1ENR |= (0x01<<5);
//将第4位置1 使能GPIOE组时钟
RCC_AHB1ENR |= (0x01<<4);
Led0();
Led1();
Led2();
Led3();
}
/********************************* 引脚说明: LED0 -- PF9 **********************************/
void Led0()
{
//设置GPIOF9为输出模式
GPIOF_MODER &= ~(0x01<<19); //19位清0
GPIOF_MODER |= (0x01<<18); //18位置1
//设置GPIOF9为输出推挽
GPIOF_OTYPER &= ~(0x01<<9); //9位清0
//设置GPIOF9为上拉
GPIOF_PUPDR &= ~(0x01<<19); //19位清0
GPIOF_PUPDR |= (0x01<<18); //18位置1
//设置GPIOF9输出速度50MHZ
GPIOF_OSPEEDR |= (0x01<<19); //19位置1
GPIOF_OSPEEDR &= ~(0x01<<18); //18位清0
}
/********************************* 引脚说明: LED1 -- PF10 **********************************/
void Led1()
{
//设置GPIOF10为输出模式
GPIOF_MODER &= ~(0x01<<21); //21位清0
GPIOF_MODER |= (0x01<<20); //20位置1
//设置GPIOF9为输出推挽
GPIOF_OTYPER &= ~(0x01<<10); //10位清0
//设置GPIOF9为上拉
GPIOF_PUPDR &= ~(0x01<<21); //21位清0
GPIOF_PUPDR |= (0x01<<20); //20位置1
//设置GPIOF9输出速度50MHZ
GPIOF_OSPEEDR |= (0x01<<21); //21位置1
GPIOF_OSPEEDR &= ~(0x01<<20); //20位清0
}
/********************************* 引脚说明: LED2 -- PE13 **********************************/
void Led2()
{
//将第4位置1 使能GPIOE组时钟
//RCC_AHB1ENR |= (0x01<<4);
//设置GPIOF13为输出模式
GPIOE_MODER &= ~(0x01<<27); //27位清0
GPIOE_MODER |= (0x01<<26); //26位置1
//设置GPIOE输出速度为50MHZ
GPIOE_OSPEEDR |= (0x01<<26); //26位置1
GPIOE_OSPEEDR &= ~(0x01<<27); //27为清0
//设置GPIOE为上拉
GPIOE_PUPDR &= ~(0x01<<27); //27位清0
GPIOE_PUPDR |= (0x01<<26); //26位置1
//设置GPIOE为输出推挽
GPIOE_OTYPER &= ~(0x01<<13); //13位清0
}
/********************************* 引脚说明: LED3 -- PE14 **********************************/
void Led3()
{
//设置GPIOE14为输出模式
GPIOE_MODER &= ~(0x01<<29); //29位清0
GPIOE_MODER |= (0x01<<28); //28位置1
//设置GPIOE输出速度为50MHZ
GPIOE_OSPEEDR |= (0x01<<28); //28位置1
GPIOE_OSPEEDR &= ~(0x01<<29); //29为清0
//设置GPIOE为上拉
GPIOE_PUPDR &= ~(0x01<<29); //29位清0
GPIOE_PUPDR |= (0x01<<28); //28位置1
//设置GPIOE为输出推挽
GPIOE_OTYPER &= ~(0x01<<14); //14位清0
}
八、蜂鸣器代码
main.c
#include "stm32f4xx.h"
#include "led.h"
void delay(int n)
{
int i,j;
for(i=0; i<n; i++)
for(j=0; j<30000; j++);
}
int main(void)
{
Led_Init();
while(1)
{
GPIOF_BSRR |= (0x01<<8); //开
delay(3000);
GPIOF_BSRR |= (0x01<<24); //关
}
return 0;
}
Led.c
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx.h"
//设置时钟
#define RCC_AHB1ENR (*((unsigned int *)(0x40023800+0x30))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_MODER (*((unsigned int *)(0x40021400+0x00))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_OTYPER (*((unsigned int *)(0x40021400+0x04))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_OSPEEDR (*((unsigned int *)(0x40021400+0x08))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_PUPDR (*((unsigned int *)(0x40021400+0x0C))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_ODR (*((unsigned int *)(0x40021400+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOF_BSRR (*((unsigned int *)(0x40021400+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_MODER (*((unsigned int *)(0x40021000+0x00))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OTYPER (*((unsigned int *)(0x40021000+0x04))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_OSPEEDR (*((unsigned int *)(0x40021000+0x08))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_PUPDR (*((unsigned int *)(0x40021000+0x0C))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_ODR (*((unsigned int *)(0x40021000+0x14))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
#define GPIOE_BSRR (*((unsigned int *)(0x40021000+0x18))) //值强制类型转为地址,通过地址解引用,访问地址空间的值
void Led_Init(void);
//分别初始化各个D1 -- D4的灯函数
void Led0(void);
void Led1(void);
void Led2(void);
void Led3(void);
void Beep(void);
#endif
led.c
#include "led.h"
void Led_Init(void)
{
//将第5位置1 使能GPIOF组时钟
RCC_AHB1ENR |= (0x01<<5);
//将第4位置1 使能GPIOE组时钟
RCC_AHB1ENR |= (0x01<<4);
Led0();
Led1();
Led2();
Led3();
Beep();
}
/********************************* 引脚说明: LED0 -- PF9 **********************************/
void Led0()
{
//设置GPIOF9为输出模式
GPIOF_MODER &= ~(0x01<<19); //19位清0
GPIOF_MODER |= (0x01<<18); //18位置1
//设置GPIOF9为输出推挽
GPIOF_OTYPER &= ~(0x01<<9); //9位清0
//设置GPIOF9为上拉
GPIOF_PUPDR &= ~(0x01<<19); //19位清0
GPIOF_PUPDR |= (0x01<<18); //18位置1
//设置GPIOF9输出速度50MHZ
GPIOF_OSPEEDR |= (0x01<<19); //19位置1
GPIOF_OSPEEDR &= ~(0x01<<18); //18位清0
}
/********************************* 引脚说明: LED1 -- PF10 **********************************/
void Led1()
{
//设置GPIOF10为输出模式
GPIOF_MODER &= ~(0x01<<21); //21位清0
GPIOF_MODER |= (0x01<<20); //20位置1
//设置GPIOF9为输出推挽
GPIOF_OTYPER &= ~(0x01<<10); //10位清0
//设置GPIOF9为上拉
GPIOF_PUPDR &= ~(0x01<<21); //21位清0
GPIOF_PUPDR |= (0x01<<20); //20位置1
//设置GPIOF9输出速度50MHZ
GPIOF_OSPEEDR |= (0x01<<21); //21位置1
GPIOF_OSPEEDR &= ~(0x01<<20); //20位清0
}
/********************************* 引脚说明: LED2 -- PE13 **********************************/
void Led2()
{
//将第4位置1 使能GPIOE组时钟
//RCC_AHB1ENR |= (0x01<<4);
//设置GPIOF13为输出模式
GPIOE_MODER &= ~(0x01<<27); //27位清0
GPIOE_MODER |= (0x01<<26); //26位置1
//设置GPIOE输出速度为50MHZ
GPIOE_OSPEEDR |= (0x01<<26); //26位置1
GPIOE_OSPEEDR &= ~(0x01<<27); //27为清0
//设置GPIOE为上拉
GPIOE_PUPDR &= ~(0x01<<27); //27位清0
GPIOE_PUPDR |= (0x01<<26); //26位置1
//设置GPIOE为输出推挽
GPIOE_OTYPER &= ~(0x01<<13); //13位清0
}
/********************************* 引脚说明: LED3 -- PE14 **********************************/
void Led3()
{
//设置GPIOE14为输出模式
GPIOE_MODER &= ~(0x01<<29); //29位清0
GPIOE_MODER |= (0x01<<28); //28位置1
//设置GPIOE输出速度为50MHZ 2y:2y 2*14:2*14+1 28:29
GPIOE_OSPEEDR |= (0x01<<28); //28位置1
GPIOE_OSPEEDR &= ~(0x01<<29); //29为清0
//设置GPIOE为上拉
GPIOE_PUPDR &= ~(0x01<<29); //29位清0
GPIOE_PUPDR |= (0x01<<28); //28位置1
//设置GPIOE为输出推挽
GPIOE_OTYPER &= ~(0x01<<14); //14位清0
}
//设置蜂鸣器
void Beep(void)
{
//设置GPIOE8为01 输出模式
GPIOF_MODER &= ~(0x01<<17); //0
GPIOF_MODER |= (0x01<<16); //1
//设置GPIOE输出速度为50MHZ
GPIOF_OSPEEDR |= (0x01<<17); //1
GPIOF_OSPEEDR &= ~(0x01<<16); //0
//设置GPIOE为上拉
GPIOF_PUPDR &= ~(0x01<<17); //0
GPIOF_PUPDR |= (0x01<<16); //1
//设置GPIOE为输出推挽
GPIOF_OTYPER &= ~(0x01<<24); //0
}
边栏推荐
猜你喜欢





随机推荐
0 code 4 steps to experience IoT devices on the cloud
不安装运行时运行.NET程序
【网络结构】VGG
深度学习GPU最全对比,到底谁才是性价比之王?
语音识别新一轮竞争打响,自然对话会是下一个制高点吗?
Phaser(二):小恐龙跑酷游戏
After the cnpm installation is successful, the prompt is not an internal and external command, nor is it a runnable command solution
泰山OFFICE技术讲座:段落边框的绘制难点在哪里?
49 万奖金等你来拿!第四届实时计算 Flink 挑战赛启动,Beyond Stream Processing!
问题7:功能测试花瓶用例
cmd 关闭端口
劲爆!协程终于来了!线程即将是过去式
如何选择合适的损失函数,请看......
Yii2安装遇到Loading composer repositories with package information
【周报】2022年7月24日
方舟生存进化开服需要多少钱
上亿数据怎么玩深度分页?兼容MySQL + ES + MongoDB
基于牛顿方法在直流微电网潮流研究(Matlab代码实现)
sql注入之报错注入(精简详细)
新版本的 MaxCompute 中,SQL支持的 LIMIT OFFSET 的语法是什么功能?