当前位置:网站首页>Article 8: Design of multi-functional intelligent trunk following control system | undergraduate graduation project - [reply and Q & a record of design completion]
Article 8: Design of multi-functional intelligent trunk following control system | undergraduate graduation project - [reply and Q & a record of design completion]
2022-06-12 01:01:00 【COOL_ DREAM_】
ask 1: Multifunctional intelligent following luggage compartment , What if the battery runs out ? What are the countermeasures ?
answer : The smart luggage has been designed with no electricity at the beginning . The main design point is the design of the power wheel , The power wheel is designed to be liftable , In auto follow mode, the power wheel descends , Drive the trunk to travel ; If the luggage compartment is dead , The power wheel will rise automatically , The suitcase is like an ordinary trolley case , Walking with the box .
ask 2: What is the process of creating the mathematical model of the luggage compartment following the movement ?
answer : The motion model of the luggage compartment is actually a two-dimensional plane coordinate system , Take a point in the plane of the luggage compartment O Origin , Set up a rectangular coordinate system O-xy, With a The position of the suitcase at two adjacent times with a short time interval is the research object . Trunk rotation The bending radius is set to R, The center distance between the two driving wheels of the luggage compartment is set to L,υL and υR They are the left side of the trunk 、 Speed of the right drive wheel ,θ1 It is the turning angle of the trunk at two adjacent moments ,θ2 It is the suitcase that flies at two adjacent times The amount of angular change ,θ3 Is the auxiliary angle , And θ1 identical . Set the speed of the trunk to υ, Angular velocity is ω. From the geometric relation in the figure, we can get θ1=θ2=θ3 The formula 2.5 Note that the adjacent time interval is Δt, because Δt Very small , Its own attitude and heading angle change θ2 Very small , so The approximate formula can be obtained : 𝜃3 ≈ sin 𝜃3 = 𝑑 𝐿 = (𝑣𝑅−𝑣𝐿 )∆𝑡 𝐿 The formula 2.6 The angular velocity of the luggage compartment is : 𝜔 = 𝜃3 ∆𝑡 = 𝑣𝑅−𝑣𝐿 𝐿 The formula 2.7 The forward speed of the luggage compartment is the average speed of the left and right driving wheels : 𝑣 = 𝑣𝑅+𝑣𝐿 2 The formula 2.8 The turning radius of the luggage compartment can be expressed as : 𝑅 = 𝑣 𝜔 = 𝐿(𝑣𝑅+𝑣𝐿) 2(𝑣𝑅−𝑣𝐿) The formula 2.9 The trunk movement control is mainly to control the speed of the left and right driving wheels of the trunk to realize the control of the front of the trunk Advance speed 、 Control of steering angular speed, turning radius and other parameters , So we use three-dimensional vector 𝐺 = [𝑣𝜔𝑅] 𝑇 As a line The control vector of the suitcase .
ask 3:Uwb Relationship with the base station
answer :Uwb It is a positioning chip or positioning module , The base station and the tag are used to receive and transmit location information . Base station and tag usage UWB Made of modules .
ask 4: How to achieve automatic following ?
answer : First, follow automatically , Based on positioning technology , By getting the user's position coordinates , Calculate the relative coordinates of the user relative to the luggage compartment , Through the motion model of the luggage compartment , Control the differential movement of the power wheel to control the direction of the box , The travel speed of the luggage compartment is controlled according to the distance between the luggage compartment and the user , So as to achieve the effect of automatic following .
边栏推荐
- Global and Chinese chromatographic silica gel resin industry research and investment direction forecast report 2022 Edition
- [工具] spacing.js 测间距
- Started with trust and loyal to profession | datapipeline received a thank you letter from Shandong city commercial bank Alliance
- Recurrent+Transformer 视频恢复领域的‘德艺双馨’
- Building circuits on glass
- 接口自动化测试很难?带你从0到1入门接口自动化测试【0基础也能看懂系列】
- [case] building a universal data lake for Fuguo fund based on star ring technology data cloud platform TDC
- Ms-hgat: information diffusion prediction based on memory enhanced sequence hypergraph attention network
- 河南中创|从云到边,边缘计算如何赋能数据中心
- Jeecgboot 3.1.0 release, enterprise low code platform based on code generator
猜你喜欢

Streaming data warehouse storage: requirements and architecture

MS-HGAT: 基于记忆增强序列超图注意力网络的信息扩散预测

websocket服务器实战
![Is interface automation difficult? Take you from 0 to 1 to get started with interface automation test [0 basic can also understand series]](/img/78/f36cdc53b94dc7da576d114a3eb2a6.png)
Is interface automation difficult? Take you from 0 to 1 to get started with interface automation test [0 basic can also understand series]

ROS2之OpenCV基础代码对比foxy~galactic~humble

河南中创|从云到边,边缘计算如何赋能数据中心
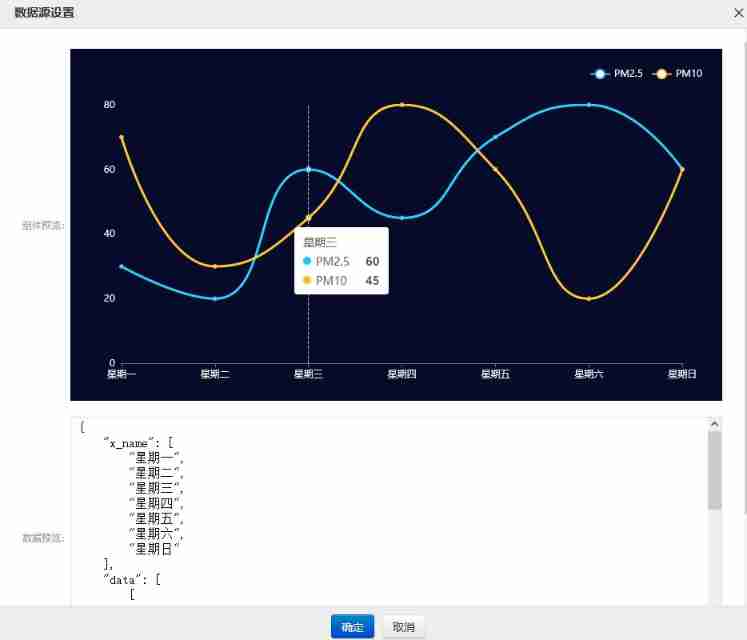
Component introduction - large screen cloud minimalist user manual

出门带着小溪
Virtual human appears on the stage of the Winter Olympic Games, connecting elements of the meta universe

What are the advantages of Tiktok applet
随机推荐
Global and Chinese chromatographic silica gel resin industry research and investment direction forecast report 2022 Edition
LabVIEW Arduino电子称重系统(项目篇—1)
About MySQL password modification failure
Devops landing practice drip and pit stepping records - (1)
flowable 工作流
Tencent programmer roast: 1kW real estate +1kw stock +300w cash, ready to retire at the age of 35
[signalr complete series] Implementation of signalr packet communication in net6
Win jar package setting boot auto start
Lambda中间操作map
Devops landing practice drip and pit stepping records - (1)
Creating a flutter high performance rich text editor - rendering
Nat. Comm. | supercomputing +ai: providing navigation for natural product biosynthesis route planning
VsCode - 保存文件自动格式化将单引号 ‘ 变成双引号 “ 的问题
Intel trimbert: tailor Bert for trade-offs
Vscode - the problem of saving a file and automatically formatting the single quotation mark 'into a double quotation mark'
Lambda中间操作limit
Characteristics of JS logical operators
Sword finger offer 09 Implementing queues with two stacks
Argodb 3.2 of star ring technology was officially released to comprehensively upgrade ease of use, performance and security
Lambda intermediate operation skip