当前位置:网站首页>[yolov4] matlab simulation of network target detection based on yolov4 deep learning
[yolov4] matlab simulation of network target detection based on yolov4 deep learning
2022-06-26 06:58:00 【FPGA and MATLAB】
YOLO To YOLOv3 when , Basically, this series has reached a climax , In many practical tasks , You'll see them all YOLOv3 The body of , And for the simpler and more complex scenarios , For example, there are no too dense targets and extremely small targets , Most of the time just use YOLOv2 that will do . except YOLO series , There are many other excellent jobs , For example, the structure is also simple RetinaNet and SSD. the latter SSD In fact, it is often seen in practical tasks , Just in terms of performance , Slightly worse than YOLOv3, Of course , This is also because SSD No follow-up upgrade , Instead, many new jobs such as RFB-Net、DSSD And so on baseline. On performance ,RetinaNet Of course, it is not inferior to YOLOv3 Of , It's just , Compare with YOLOv3,RetinaNet One of the more fatal problems of : Too slow . The main reason for this problem is RetinaNet Use a larger output image size and a heavier detection head .
yolov4 Innovation of
1. Innovation at the input end : Improvement of input during training , It mainly includes Mosaic Data to enhance 、cmBN、SAT Self confrontation training
2.BackBone Backbone network : A combination of methods and techniques , Include :CSPDarknet53、Mish Activation function 、Dropblock
3.Neck: Target detection network in BackBone And the last output layer will often insert some layers , such as Yolov4 Medium SPP modular 、FPN+PAN structure
4.Head: The anchor frame mechanism of output layer and Yolov3 identical , The main improvement is the regression box position loss function during training CIOU_Loss, And prediction box screening nms Turn into DIOU_nms
Generally speaking , That is to say YOLO-v4 The algorithm is based on the original YOLO Based on the target detection architecture , Adopted in recent years CNN The best optimization strategy in the field , from Data processing 、 Backbone network 、 Network training 、 Activation function 、 Loss function And other aspects have been optimized to varying degrees , Although there is no theoretical innovation , But it will be welcomed by many engineers , Attempts of various optimization algorithms . The article is like Target detected trick review , The effect has achieved FPS And Precision Balanced target detection new baseline.
yolov4 The algorithm used in the network structure , Which retains yolov3 Of head part , Modified the backbone network to CSPDarknet53, At the same time SPP( Space Pyramid pooling ) To expand the feeling field ,PANet As neck part .

yolov4 stay Technical treatment Mind maps :

1.MATLAB Source code
clc;
clear;
close all;
warning off;
addpath(genpath(pwd));
%****************************************************************************
% More about matlab and fpga Search for “fpga and matlab” Of CSDN Blog :
%matlab/FPGA Project development cooperation
%https://blog.csdn.net/ccsss22?type=blog
%****************************************************************************
%% Download Pretrained Network
% Set the modelName from the above ones to download that pretrained model.
modelName = 'YOLOv4-coco';
model = helper.downloadPretrainedYOLOv4(modelName);
net = model.net;
%% Load Data
% Unzip the vehicle images and load the vehicle ground truth data.
unzip vehicleDatasetImages.zip
data = load('vehicleDatasetGroundTruth.mat');
vehicleDataset = data.vehicleDataset;
% Add the full path to the local vehicle data folder.
vehicleDataset.imageFilename = fullfile(pwd, vehicleDataset.imageFilename);
rng('default')
shuffledIndices = randperm(height(vehicleDataset));
idx = floor(0.6 * length(shuffledIndices));
trainingDataTbl = vehicleDataset(shuffledIndices(1:idx), :);
testDataTbl = vehicleDataset(shuffledIndices(idx+1:end), :);
% Create an image datastore for loading the images.
imdsTrain = imageDatastore(trainingDataTbl.imageFilename);
imdsTest = imageDatastore(testDataTbl.imageFilename);
% Create a datastore for the ground truth bounding boxes.
bldsTrain = boxLabelDatastore(trainingDataTbl(:, 2:end));
bldsTest = boxLabelDatastore(testDataTbl(:, 2:end));
% Combine the image and box label datastores.
trainingData = combine(imdsTrain, bldsTrain);
testData = combine(imdsTest, bldsTest);
helper.validateInputData(trainingData);
helper.validateInputData(testData);
%% Data Augmentation
augmentedTrainingData = transform(trainingData, @helper.augmentData);
augmentedData = cell(4,1);
for k = 1:4
data = read(augmentedTrainingData);
augmentedData{k} = insertShape(data{1,1}, 'Rectangle', data{1,2});
reset(augmentedTrainingData);
end
figure
montage(augmentedData, 'BorderSize', 10)
%% Preprocess Training Data
% Specify the network input size.
networkInputSize = net.Layers(1).InputSize;
preprocessedTrainingData = transform(augmentedTrainingData, @(data)helper.preprocessData(data, networkInputSize));
% Read the preprocessed training data.
data = read(preprocessedTrainingData);
% Display the image with the bounding boxes.
I = data{1,1};
bbox = data{1,2};
annotatedImage = insertShape(I, 'Rectangle', bbox);
annotatedImage = imresize(annotatedImage,2);
figure
imshow(annotatedImage)
% Reset the datastore.
reset(preprocessedTrainingData);
%% Modify Pretrained YOLO v4 Network
rng(0)
trainingDataForEstimation = transform(trainingData, @(data)helper.preprocessData(data, networkInputSize));
numAnchors = 9;
[anchorBoxes, meanIoU] = estimateAnchorBoxes(trainingDataForEstimation, numAnchors);
% Specify the classNames to be used in the training.
classNames = {'vehicle'};
[lgraph, networkOutputs, anchorBoxes, anchorBoxMasks] = configureYOLOv4(net, classNames, anchorBoxes, modelName);
%% Specify Training Options
numEpochs = 90;
miniBatchSize = 4;
learningRate = 0.001;
warmupPeriod = 1000;
l2Regularization = 0.001;
penaltyThreshold = 0.5;
velocity = [];
%% Train Model
if canUseParallelPool
dispatchInBackground = true;
else
dispatchInBackground = false;
end
mbqTrain = minibatchqueue(preprocessedTrainingData, 2,...
"MiniBatchSize", miniBatchSize,...
"MiniBatchFcn", @(images, boxes, labels) helper.createBatchData(images, boxes, labels, classNames), ...
"MiniBatchFormat", ["SSCB", ""],...
"DispatchInBackground", dispatchInBackground,...
"OutputCast", ["", "double"]);
% Convert layer graph to dlnetwork.
net = dlnetwork(lgraph);
% Create subplots for the learning rate and mini-batch loss.
fig = figure;
[lossPlotter, learningRatePlotter] = helper.configureTrainingProgressPlotter(fig);
iteration = 0;
% Custom training loop.
for epoch = 1:numEpochs
reset(mbqTrain);
shuffle(mbqTrain);
while(hasdata(mbqTrain))
iteration = iteration + 1;
[XTrain, YTrain] = next(mbqTrain);
% Evaluate the model gradients and loss using dlfeval and the
% modelGradients function.
[gradients, state, lossInfo] = dlfeval(@modelGradients, net, XTrain, YTrain, anchorBoxes, anchorBoxMasks, penaltyThreshold, networkOutputs);
% Apply L2 regularization.
gradients = dlupdate(@(g,w) g + l2Regularization*w, gradients, net.Learnables);
% Determine the current learning rate value.
currentLR = helper.piecewiseLearningRateWithWarmup(iteration, epoch, learningRate, warmupPeriod, numEpochs);
% Update the network learnable parameters using the SGDM optimizer.
[net, velocity] = sgdmupdate(net, gradients, velocity, currentLR);
% Update the state parameters of dlnetwork.
net.State = state;
% Display progress.
if mod(iteration,10)==1
helper.displayLossInfo(epoch, iteration, currentLR, lossInfo);
end
% Update training plot with new points.
helper.updatePlots(lossPlotter, learningRatePlotter, iteration, currentLR, lossInfo.totalLoss);
end
end
% Save the trained model with the anchors.
anchors.anchorBoxes = anchorBoxes;
anchors.anchorBoxMasks = anchorBoxMasks;
save('yolov4_trained', 'net', 'anchors');
%% Evaluate Model
confidenceThreshold = 0.5;
overlapThreshold = 0.5;
% Create a table to hold the bounding boxes, scores, and labels returned by
% the detector.
numImages = size(testDataTbl, 1);
results = table('Size', [0 3], ...
'VariableTypes', {'cell','cell','cell'}, ...
'VariableNames', {'Boxes','Scores','Labels'});
% Run detector on images in the test set and collect results.
reset(testData)
while hasdata(testData)
% Read the datastore and get the image.
data = read(testData);
image = data{1};
% Run the detector.
executionEnvironment = 'auto';
[bboxes, scores, labels] = detectYOLOv4(net, image, anchors, classNames, executionEnvironment);
% Collect the results.
tbl = table({bboxes}, {scores}, {labels}, 'VariableNames', {'Boxes','Scores','Labels'});
results = [results; tbl];
end
% Evaluate the object detector using Average Precision metric.
[ap, recall, precision] = evaluateDetectionPrecision(results, testData);
% The precision-recall (PR) curve shows how precise a detector is at varying
% levels of recall. Ideally, the precision is 1 at all recall levels.
% Plot precision-recall curve.
figure
plot(recall, precision)
xlabel('Recall')
ylabel('Precision')
grid on
title(sprintf('Average Precision = %.2f', ap))
%% Detect Objects Using Trained YOLO v4
reset(testData)
data = read(testData);
% Get the image.
I = data{1};
% Run the detector.
executionEnvironment = 'auto';
[bboxes, scores, labels] = detectYOLOv4(net, I, anchors, classNames, executionEnvironment);
% Display the detections on image.
if ~isempty(scores)
I = insertObjectAnnotation(I, 'rectangle', bboxes, scores);
end
figure
imshow(I)
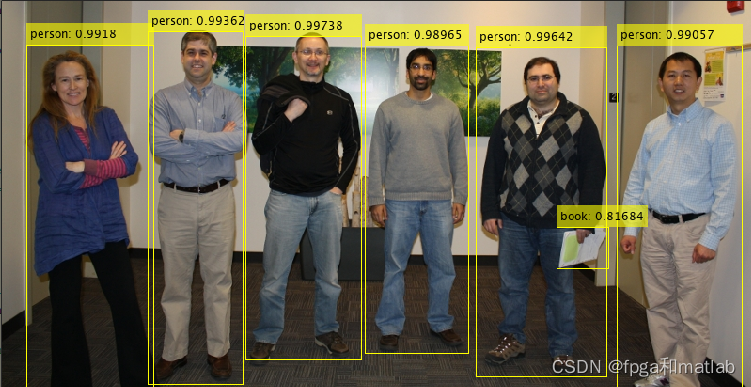
2.yolov4 Simulation effect




resources
边栏推荐
- What is deadlock
- 面试官:测试计划和测试方案有什么区别?
- [micro service series] protocol buffer dynamic analysis
- Analyse d'un problème classique
- China peek market outlook and future strategic planning proposal report 2022-2027
- Closure problem C Lua
- Matlab linear programming model learning notes
- [path planning] robot path planning based on improved artificial potential field with matlab code
- China's Ni MH battery industry development overview analysis and investment trend forecast report 2022 Edition
- 【元胞自动机】基于元胞自动机实现高速公路收费站交通流问题附matlab代码
猜你喜欢
![[004] [stm32] MDK project configuration and commissioning](/img/a8/9817cdbbce557a92739de494490706.jpg)
[004] [stm32] MDK project configuration and commissioning
【路径规划】基于改进人工势场实现机器人路径规划附matlab代码

Pagoda server setup and database remote connection

LabVIEW arduino TCP / IP Remote Intelligent Home System (Project section - 5)
宝塔服务器搭建及数据库远程连接

Past events of Xinhua III
分析 NFT 项目的 5 个指标
One chip realizes functions such as spray 𞓜 ws2812 drive | key touch | LED display | voice broadcast chip and simplifies the design of humidifier products
Bugku练习题---MISC---富强民主

海量日志采集工具——Flume
随机推荐
[004] [stm32] MDK project configuration and commissioning
Decompile Android applications, interview Android
Guide to "avoid dismissal during probation period"
Load balancer does not have available server for client: userService问题解决
屏幕共享推荐
China's wind farm operation industry's "fourteenth five year plan" planning direction and investment risk prediction report 2022-2027
Promise API for getting started with the web
Fmt Must the result of println (true) be true?
unity之EasyAR使用
Installation and login of MySQL database
SQL 查询语句
China polyimide film market demand and future investment risk outlook report 2022-2027
浅析一道经典题
[image fusion] MRI-CT image fusion based on gradient energy, local energy and PCA fusion rules with matlab code
“试用期避免被辞退“ 指南攻略
【图像融合】基于耦合特征学习的多模式医学图像融合附matlab代码
MYSQL触发器要如何设置,简单教程新手一看就会
Custom reference formats used by Zotero
[image detection] image target size measurement system based on morphology with matlab code
One chip realizes functions such as spray 𞓜 ws2812 drive | key touch | LED display | voice broadcast chip and simplifies the design of humidifier products