当前位置:网站首页>CloudCompare & PCL ICP registration (point to face)
CloudCompare & PCL ICP registration (point to face)
2022-08-01 12:03:00 【dayuhaitang_galaxy】
Article table of contents
I. Introduction
The ICP algorithm is divided into 6 stages, as shown in the following figure:

(1) Select the overlapping point cloud subsets. In this step, if the amount of original point cloud data is relatively large, the original point cloud will generally be down-sampled.
(2) Match feature points.Usually it is the two closest points, but of course this depends on the criteria of judgment.
(3) Weighting.The found corresponding points are weighted according to how well the points match.
(4) Suppress matching points.Some poor quality point pairs are suppressed (rejected) according to the matching degree of matching points.
(5) Error minimization.The transformation parameters are estimated by minimizing the sum of squared distances.
(6) Point cloud transformation.Transform the source point cloud by the estimated transformation matrix.
Except for the last step in the whole process, the remaining steps have been explored and researched by a large number of literatures, so there are many variant methods, among which point-to-surface ICP is one of them.
2. Types in PCL
边栏推荐
- The difference between undefined and null in JS
- Aeraki Mesh became CNCF sandbox project
- Visualization of lag correlation of two time series data in R language: use the ccf function of the forecast package to draw the cross-correlation function, and analyze the lag correlation according t
- C#/VB.NET 将PPT或PPTX转换为图像
- Pytest电商项目实战(下)
- Pytest e-commerce project combat (below)
- 《MySQL核心知识》第6章:查询语句
- xss漏洞学习
- 复现assert和eval成功连接或失败连接蚁剑的原因
- Promise学习(一)Promise是什么?怎么用?回调地狱怎么解决?
猜你喜欢

xss-labs靶场挑战
【likeshop】回收租凭系统100%开源无加密 商城+回收+租赁
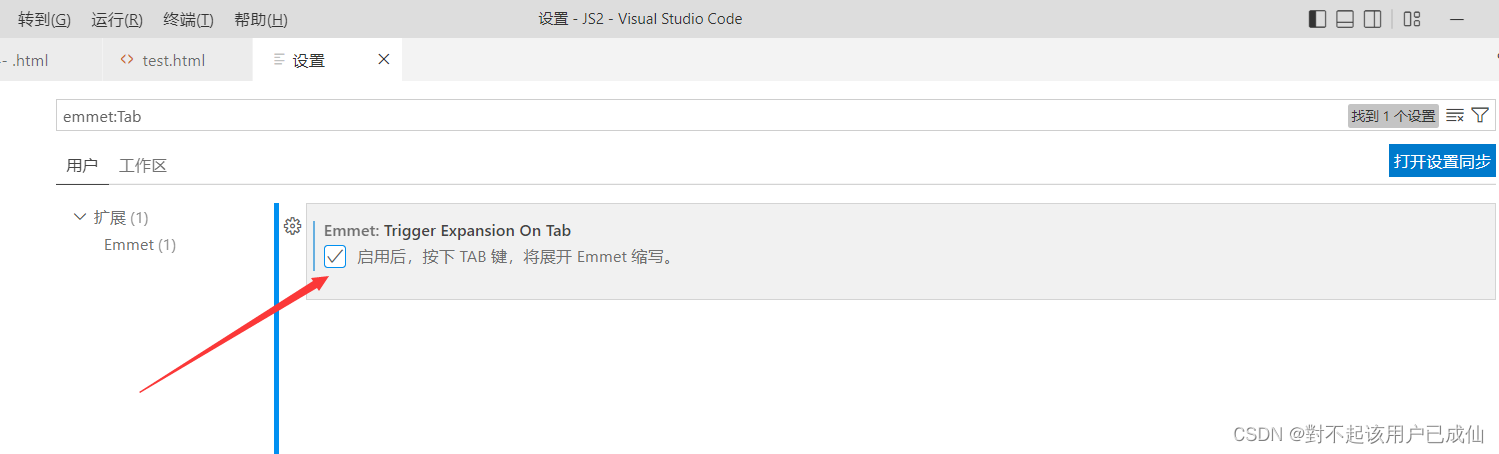
Solve vscode input! Unable to quickly generate skeletons (three methods for the new version of vscode to quickly generate skeletons)

Promise to learn several key questions (3) the Promise - state change, execution sequence and mechanism, multitasking series, abnormal penetration, interrupt the chain of Promise
.NET深入解析LINQ框架(三:LINQ优雅的前奏)

【公开课预告】:超分辨率技术在视频画质增强领域的研究与应用
Promise学习(三)Promise的几个关键性问题 -- 状态改变、执行顺序与机制、多任务串联、异常穿透、中断promise链

将同级数据处理成树形数据

Pytest e-commerce project combat (below)
基于ArkUI eTS开发的坚果食谱(NutRecipes)
随机推荐
华硕和微星多款产品将升级英特尔Arc A380和A310显卡
如何获取微信视频号的地址(微信公众号的链接地址)
leetcode每日一题:字符串压缩
Aeraki Mesh Joins CNCF Cloud Native Panorama
【倒计时5天】探索音画质量提升背后的秘密,千元大礼等你来拿
pandas连接oracle数据库并拉取表中数据到dataframe中、筛选当前时间(sysdate)到一个小时之前的所有数据(筛选一个小时的范围数据)
上周热点回顾(7.25-7.31)
每日一题:连续子数组的最大和(动态规划)
[CLion] CLion always prompts "This file does not belong to any project target xxx" solution
回归预测 | MATLAB实现RNN循环神经网络多输入单输出数据预测
万字解析:vector类
How do programmers solve online problems gracefully?
Promise学习(一)Promise是什么?怎么用?回调地狱怎么解决?
进制与转换、关键字
Why Metropolis–Hastings Works
复现assert和eval成功连接或失败连接蚁剑的原因
R语言拟合ARIMA模型:使用forecast包中的auto.arima函数自动搜索最佳参数组合、模型阶数(p,d,q)、设置seasonal参数指定在模型中是否包含季节信息
xss-labs靶场挑战
R语言诊断ARIMA模型:forecast包构建了一个ARIMA模型、使用checkresiduals函数诊断ARIMA模型、并进行结果解读(拟合较差的ARIMA模型具有的特点)
jmeter