当前位置:网站首页>机械臂速成小指南(零):指南主要内容及分析方法
机械臂速成小指南(零):指南主要内容及分析方法
2022-06-24 09:47:00 【躺躺我啊】
指南目录:

写在前面:
- 这个指南是我(某三流大学的自动化专业)的经验总结,因此内容肯定是浅显的,也许还是易懂的。希望这些文章可以帮大家更快的进入机械臂🦾的世界,要是能在日后研发出拳打德国KUKA 脚踢瑞士ABB的机械臂,那就更好了;
- 内容围绕六自由度机械臂机械臂展开;
- 适用于机械臂初学者️、想要参加全国大学生物联网设计竞赛的同学;
- 主要参考书籍:John J.Craig所著《机器人学导论》、Christian Siriano等人所著《机器人学建模、规划与控制》;
- 推荐网课:台大(NTU)林沛群教授🧑的机器人学,PPT也蛮好用;
- 要用到arduino(下位机)、matlab(仿真用)、python(编写上位机用,我用的是vscode)、geogebra(作图用,便于理论分析)、xmind(做流程图用)。
一、指南主要内容
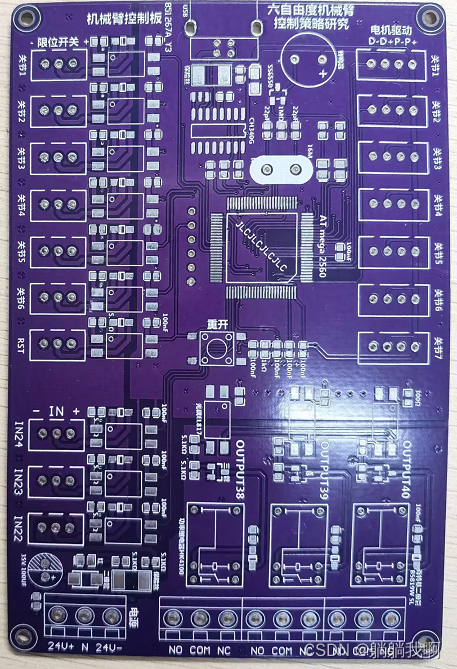
1、硬件系统
物质是一切表象的载体,要想学习机械臂,显然需要清楚控制机械臂都要用到什么东西:
- 连杆——相当于你的胳膊🦾
- 关节——和你的关节一样
- 末端执行器——相当于你的手️,安装在机械臂的末端,夹爪、吸盘之类的
- 电机——用于驱动关节
- 下位机——单片机,你得用它告诉机械臂怎么动
- 电机驱动——和单片机一起控制机械臂
- 减速器——提高电机的转矩,给它加把劲
- 传动机构——铰链、齿轮、螺杆之类的
- 编码器——检测机械臂关节旋转了多少度,用于闭环控制
- 限位开关——可以用来校准机械臂
- 刹车——用于在断电的时候抱死位置较低的关节,防止机械臂受伤
- 直流稳压电源——给机械臂和下位机供电
- 对机械臂的爱️——这个是重中之重

2.运动学分析
机械臂的运动学可以说是最最最关键的内容了。把机械臂的浑身上下看作肛刚体,通过对它进行运动学分析,可以通过机械臂关节旋转角度(对于旋转关节来说)得到它的末端在哪儿、朝哪儿(位姿),也可通过机械臂在哪儿、朝哪儿(位姿)得到机械臂关节旋转角度(对于旋转关节来说)。
机械臂运动学的主要内容包括使用标准DH法完成机械臂运动学建模、正运动学求解、逆运动学求解、可达工作空间的求解。
3.轨迹规划
机械臂的末端从A点运动到B点必然会在空间中留下运动路径,我们将路径相对于时间的关系称为轨迹。我们肯定是想让机械臂按照期望的轨迹运动嘛,所以轨迹规划应运而生。
本指南中介绍5种简单实用的轨迹规划方法,没有A*算法、B样条、NURBS之类的东西哦,深度学习什么的就更不用说了。。。
二、指南分析方法
1.理论分析
理论分析肯定是要有的,里面有很多很多很多很多矩阵运算。

2.计算机仿真
咱没那个条件去实测机械臂各关节的运动状态,solidworks建模也不太行,还好matlab里有RTB工具箱救我于水火之中,运动学建模及分析、轨迹规划都可以用它。🪄
3.实际应用
是骡子是马都得拉出来溜溜。把对应程序写到上位机(负责计算)与下位机(负责控制电机、限位开关、刹车)里,并使用AE追踪它在空间中实际留下的轨迹。
注:AE使用方法在我的另一篇文章中有说明。《使用AE(After Effects)描绘物体移动路径(一点跟踪)》 https://blog.csdn.net/m0_53966219/article/details/124682733?spm=1001.2014.3001.550
https://blog.csdn.net/m0_53966219/article/details/124682733?spm=1001.2014.3001.550
同时,我参考国标设计了一种使用两个百分表检测机械臂重复定位精度的方法(比较粗糙),目的是量化机械臂控制效果,这点还是挺重要的。
选择使用两个百分表测量是因为资金就够买两个。

边栏推荐
- charles抓包工具使用教程
- 学习使用phpstripslashe函数去除反斜杠
- Machine learning perceptron and k-nearest neighbor
- Practice sharing of packet capturing tool Charles
- 静态链接库和动态链接库的区别
- numpy. logical_ or
- Safety and food security for teachers and students of the trapped Yingxi middle school
- 小程序 rich-text中图片点击放大与自适应大小问题
- The difference between the sleep () method and the wait () method of a thread
- What are the characteristics of EDI local deployment and cloud hosting solutions?
猜你喜欢

2022全网最全最细的jmeter接口测试教程以及接口测试流程详解— JMeter测试计划元件(线程<用户>)

uniapp实现点击拨打电话功能

线程的 sleep() 方法与 wait() 方法的区别
分布式系统你必须了解的点-CAP
![[energy reports] International Conference on energy and environmental engineering in 2022 (cfeee 2022)](/img/48/11bd949fa3695452270c3625d63e6d.jpg)
[energy reports] International Conference on energy and environmental engineering in 2022 (cfeee 2022)
Uniapp develops wechat official account, and the drop-down box selects the first one in the list by default

Yolov6: the fast and accurate target detection framework is open source

SQL Sever中的窗口函数row_number()rank()dense_rank()

leetCode-223: 矩形面积

numpy. linspace()
随机推荐
如何在一个页面上使用多个KindEditor编辑器并将值传递到服务器端
SF Technology Smart logistics Campus Technology Challenge (June 19, 2022) [AK]
88.合并有序数组
numpy.logical_and()
被困英西中学的师生安全和食物有保障
记录一下MySql update会锁定哪些范围的数据
[IEEE publication] 2022 International Conference on service robots (iwosr 2022)
How to customize sharing links in wechat for H5 web pages
抓包工具charles实践分享
图解杂项【防止丢失进行存档用的】
126. 单词接龙 II BFS
JMeter接口测试工具基础— 使用Badboy录制JMeter脚本
SQL Sever中的窗口函数row_number()rank()dense_rank()
2.登陆退出功能开发
Leetcode-2221: triangular sum of arrays
tf.errors
leetCode-1823: 找出游戏的获胜者
【数据分析数据源】全国各省市行政区坐标(包含边界坐标点和中心坐标点)
2022 the most complete and detailed JMeter interface test tutorial and detailed interface test process in the whole network - JMeter test plan component (thread < user >)
【资源分享】2022年环境工程与生物技术国际会议(CoEEB 2022)