当前位置:网站首页>Super comprehensive summary | related improvement codes of orb-slam2 / orb-slam3!
Super comprehensive summary | related improvement codes of orb-slam2 / orb-slam3!
2022-06-30 05:18:00 【3D vision workshop】
Click on the above “3D Visual workshop ”, choice “ Star standard ”
The dry goods arrive at the first time

Author Xiaoshen
Source: Shenzhen dialect AI
This paper summarizes the characteristic point method SLAM The best way to do this at present :ORB-SLAM2 / ORB-SLAM3 Summary of relevant improvement codes , Including acceleration 、 Multi-sensor fusion 、 Dense mapping 、 Line features 、 Point line fusion 、 Navigation 、 Dynamic environment 、 Multi platform migration, etc . See below for details .
For the convenience of clicking on the link , We've sorted it out pdf edition , Reply in the official account background :ORBSLAM
ORB-SLAM2 Summary of relevant improvement codes
The paper was published in 2017 Year of IEEE Transactions on Robotics, Title of thesis 《ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras》
ORB-SLAM2 characteristic :
One of the first (2017 When it was released in ) Support single item , Eyes and RGB-D Camera's complete open source SLAM programme , It has the function of loop detection and relocation .
In the CPU Work in real time on , It can be used for mobile terminals, such as Mobile robots 、 mobile phone 、 Unmanned aerial vehicle (uav) 、 automobile .
The pinnacle of the characteristic point method , High positioning accuracy , Up to centimeter level .
It can calculate the pose of the camera in real time , And generate sparse 3D reconstruction map of the scene .
The code is very clean , Contains many practical skills , Very practical .
Location only mode is supported , This mode is suitable for lightweight and long-term operation when the map is known , At this time, the threads of local mapping and loop back detection are not used
[PAPER](https://arxiv.org/abs/1610.06475),
[CODE](https://github.com/raulmur/ORB_SLAM2),
[ Super detailed Chinese annotation version ]
(https://github.com/electech6/ORBSLAM2_detailed_comments)
How to improve
[ORBSLAM2_with_pointcloud_map](https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map),
Add dense point cloud map realized by Gao Xiang
[ORB-SLAM2_RGBD_DENSE_MAP]
(https://github.com/tiantiandabaojian/ORB-SLAM2_RGBD_DENSE_MAP), Dense closed-loop map is added on the basis of Gao Xiang
[ORB-YGZ-SLAM]
(https://github.com/gaoxiang12/ORB-YGZ-SLAM),
Use SVO Instead of the time-consuming feature point extraction and matching , With the same accuracy , It's primitive ORB-SLAM2 Fast 3 times
[YGZ-stereo-inertial SLAM]
(https://github.com/gaoxiang12/ygz-stereo-inertial),
Binocular VIO edition , Joined the LK Optical flow and sliding window BA Optimize
[VI-ORB](https://github.com/jingpang/LearnVIORB),
Jingpang realized VI-ORB-SLAM2
[Fisheye-ORB-SLAM]
(https://github.com/lsyads/fisheye-ORB-SLAM), Added support for fisheye
[Save and load orb-slam2 maps]
(https://github.com/AlejandroSilvestri/osmap), Add save and import map functions
[ORB_SLAM2 with map load/save function]
(https://github.com/Jiankai-Sun/ORB_SLAM2_Enhanced), Add save and import map functions
[Viewer for maps from ORB-SLAM2 Osmap]
(https://github.com/AlejandroSilvestri/Osmap-viewer),
Added map visualization
[Add line feature based ORB-SLAM2]
(https://github.com/atlas-jj/ORB_Line_SLAM), Added line features

[RGBD-SLAM with Point and Line Features, developed based on ORB_SLAM2]
(https://github.com/maxee1900/RGBD-PL-SLAM), Added point line fusion
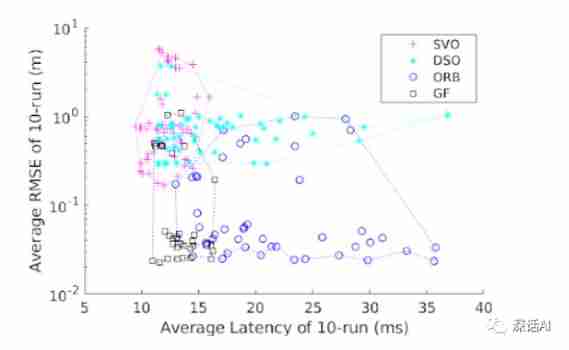
[Good Feature Selection for Least Squares Pose Optimization in VO/VSLAM]
(https://github.com/ivalab/gf_orb_slam2), A better feature selection method is used
[ORB_SLAM2_SSD_Semantic](https://github.com/Ewenwan/ORB_SLAM2_SSD_Semantic),
Dynamic semantics SLAM object detection +VSLAM+ Optical flow / Multi view geometric dynamic object detection +octomap Map + Target database

[Tracking Enhanced ORB-SLAM2]
(https://github.com/Eralien/TE-ORB_SLAM2),
use YOLO v3 To increase tracking performance

[YOLO Dynamic ORB_SLAM](https://github.com/bijustin/YOLO-DynaSLAM), use YOLO To detect the dynamic environment

Multi platform porting code
[Windows version ORBSLAM2,Easy built by visual studio]
(https://github.com/phdsky/ORBSLAM24Windows),
Windows Platform version , It can be used visual studio Easy to compile
[ORB-SLAM-Android, test on Sony Xperia Z]
(https://github.com/castoryan/ORB-SLAM-Android),
Android transplant , stay Sony Xperia Up test
[ORBSLAM2 on Mac OSX]
(https://github.com/meiroo/ORBSLAM2-OSX),Mac OSX edition
[ROS interface for ORBSLAM2]
(https://github.com/ethz-asl/orb_slam_2_ros), add to ROS Interface
ORB-SLAM3 Related codes
ORB-SLAM3
2020 year 07 In open source , The paper 《ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM》
ORB-SLAM3 characteristic
Support vision 、 Visual plus inertial navigation 、 Mixed map SLAM System , It can be used in monocular , Eyes and RGB-D Use a pinhole or fish eye model to run on the camera .
Feature based tightly coupled VIO System , It only depends on the maximum a posteriori estimation ( Include IMU On initialization ). So whether it's a big scene or a small scene , Robust real-time operation both indoors and outdoors , The accuracy is improved compared with the previous version 2 To 5 times
A multi map system based on the new relocation module , It can make the system run for a long time in scenarios with poor characteristics .
The first system to be able to reuse all previous information at all algorithmic stages , Can be in BA Use common view keyframes that are far apart .
[PAPER](https://arxiv.org/pdf/2007.11898.pdf)
[CODE](https://github.com/UZ-SLAMLab/ORB_SLAM3)
ORB_SLAM3-RGBD-Inertial
Added RGBD-IMU The mode of operation and ROS Interface , Added monocular IMU And the eyes IMU Of ROS Interface , Replace the dictionary with binary format , Faster loading . basis ORB_SLAM3 Rewrote RGBD-IMU Of ROS Interface , Avoid queue congestion , Provides Kinect for Azure Parameter file of
[CODE](https://github.com/xiefei2929/ORB_SLAM3-RGBD-Inertial)
This article is only for academic sharing , If there is any infringement , Please contact to delete .
3D Recommended visual quality courses :
1. Multi sensor data fusion technology for automatic driving field
2. For the field of automatic driving 3D Whole stack learning route of point cloud target detection !( Single mode + Multimodal / data + Code )
3. Thoroughly understand the visual three-dimensional reconstruction : Principle analysis 、 Code explanation 、 Optimization and improvement
4. China's first point cloud processing course for industrial practice
5. laser - Vision -IMU-GPS The fusion SLAM Algorithm sorting and code explanation
6. Thoroughly understand the vision - inertia SLAM: be based on VINS-Fusion The class officially started
7. Thoroughly understand based on LOAM Framework of the 3D laser SLAM: Source code analysis to algorithm optimization
8. Thorough analysis of indoor 、 Outdoor laser SLAM Key algorithm principle 、 Code and actual combat (cartographer+LOAM +LIO-SAM)
10. Monocular depth estimation method : Algorithm sorting and code implementation
11. Deployment of deep learning model in autopilot
12. Camera model and calibration ( Monocular + Binocular + fisheye )
13. blockbuster ! Four rotor aircraft : Algorithm and practice
14.ROS2 From entry to mastery : Theory and practice
blockbuster !3DCVer- Academic paper writing contribution Communication group Established
Scan the code to add a little assistant wechat , can Apply to join 3D Visual workshop - Academic paper writing and contribution WeChat ac group , The purpose is to communicate with each other 、 Top issue 、SCI、EI And so on .
meanwhile You can also apply to join our subdivided direction communication group , At present, there are mainly 3D Vision 、CV& Deep learning 、SLAM、 Three dimensional reconstruction 、 Point cloud post processing 、 Autopilot 、 Multi-sensor fusion 、CV introduction 、 Three dimensional measurement 、VR/AR、3D Face recognition 、 Medical imaging 、 defect detection 、 Pedestrian recognition 、 Target tracking 、 Visual products landing 、 The visual contest 、 License plate recognition 、 Hardware selection 、 Academic exchange 、 Job exchange 、ORB-SLAM Series source code exchange 、 Depth estimation Wait for wechat group .
Be sure to note : Research direction + School / company + nickname , for example :”3D Vision + Shanghai Jiaotong University + quietly “. Please note... According to the format , Can be quickly passed and invited into the group . Original contribution Please also contact .
▲ Long press and add wechat group or contribute
▲ The official account of long click attention
3D Vision goes from entry to mastery of knowledge : in the light of 3D In the field of vision Video Course cheng ( 3D reconstruction series 、 3D point cloud series 、 Structured light series 、 Hand eye calibration 、 Camera calibration 、 laser / Vision SLAM、 Automatically Driving, etc )、 Summary of knowledge points 、 Introduction advanced learning route 、 newest paper Share 、 Question answer Carry out deep cultivation in five aspects , There are also algorithm engineers from various large factories to provide technical guidance . meanwhile , The planet will be jointly released by well-known enterprises 3D Vision related algorithm development positions and project docking information , Create a set of technology and employment as one of the iron fans gathering area , near 4000 Planet members create better AI The world is making progress together , Knowledge planet portal :
Study 3D Visual core technology , Scan to see the introduction ,3 Unconditional refund within days
There are high quality tutorial materials in the circle 、 Answer questions and solve doubts 、 Help you solve problems efficiently
Feel useful , Please give me a compliment ~
边栏推荐
- Unity gets the resolution of the game view
- Records of problems encountered in unity + hololens development
- Win10 vs2015 compiling curaengine
- Under what conditions does the Z-index attribute expire?
- Unity2019.3.8f1 development environment configuration of hololens2
- 使用码云PublicHoliday项目判断某天是否为工作日
- Pytorchcnn image recognition and classification model training framework
- Some problems encountered in unity steamvr
- Unity application class and data file path
- [notes] unity webgl input Chinese
猜你喜欢

【LeetCode】Easy | 225. Using queue to realize stack (pure C manual tearing queue)

Force buckle 27 Removing Elements

Unity3d packaging and publishing APK process
![[note] usage model tree of the unity resource tree structure virtualizingtreeview](/img/3e/fe5610c797a14554ad735172c3ab54.jpg)
[note] usage model tree of the unity resource tree structure virtualizingtreeview

RedisTemplate 常用方法汇总

【VCS+Verdi聯合仿真】~ 以計數器為例

PWN Introduction (2) stack overflow Foundation

Baiwen.com 7 days Internet of things smart home learning experience punch in the third day
![[notes] unity webgl input Chinese](/img/f7/805f510ff691227b4c2b529cc1099a.jpg)
[notes] unity webgl input Chinese

Intellj idea generates jar packages for projects containing external lib to other projects. The method refers to the jar package written by itself
随机推荐
Chapter 12 pipeline monitoring of OpenGL super classic (version 7)
Unity multiple UI page turning left and right
LxC and LXD container summary
终端便捷ssh(免密)连接
Force buckle 704 Binary search
East Tower attack and defense world - XSS bypasses the safety dog
Some problems encountered in unity steamvr
Modbus protocol register
Unrealeengine4 - about uobject's giant pit that is automatically GC garbage collected
2021-07-29 compilation of Cura in ubantu18.04
[Motrix] download Baidu cloud files using Motrix
C # uses monopinvokecallback to directly call back C # function
Unity project hosting platform plasticscm (learn to use 2)
Ripple effect of mouse click (unity & shader)
[notes] unity Scrollview button page turning
东塔攻防世界—xss绕过安全狗
Pit of smoothstep node in shadergraph
Force buckle 27 Removing Elements
003-JS-DOM-Attr-innerText
Rotation, translation and scaling of unity VR objects