当前位置:网站首页>Overview of coherent sonar Geoswath
Overview of coherent sonar Geoswath
2022-06-22 06:14:00 【xiaokcehui】
By convention , The conclusion is as follows :
(1)GeoSwath Get the echo intensity 、 Phase difference and time , Then the water depth and sonar image are obtained ,Klein3000 Only the echo intensity is obtained , Only sonar images can be obtained .
(2) because GeoSwath Adopt side hanging fixed installation measurement ,Klein3000 Drag and drop , therefore ,GeoSwath Suitable for less than 200m Shallow water ,Klein3000 The operating water depth can reach 2000m,GeoSwath The sonar image of has no Klein3000 Exquisite , But the positioning ratio Kein3000 More accurate .
(3)GeoSwath The data directly below the probe is sparse , The data on both sides of the probe is dense , The horizontal resolution of the outer edge is enhanced , The data under the probe of traditional multi beam sounding system is dense , The data on both sides become thinner with the increase of footprints , The resolution drops rapidly , The accuracy of water depth is that the central beam is higher than the outer beam .
(4) Coherent sonar multibeam bathymetric system Geoswath plus More suitable for 200m In a shallow, simple, flat area , Such as inland waterway 、 Reservoir dam 、 Marine archaeology or pipeline exploration , Traditional multi beam bathymetric system Seabeam 1180 It is more suitable for areas with complex terrain , The deepest working water depth can reach 500—600m.
GeoSwath And Klein3000 Comprehensive comparison and experimental analysis _ Zhangjibo -2015
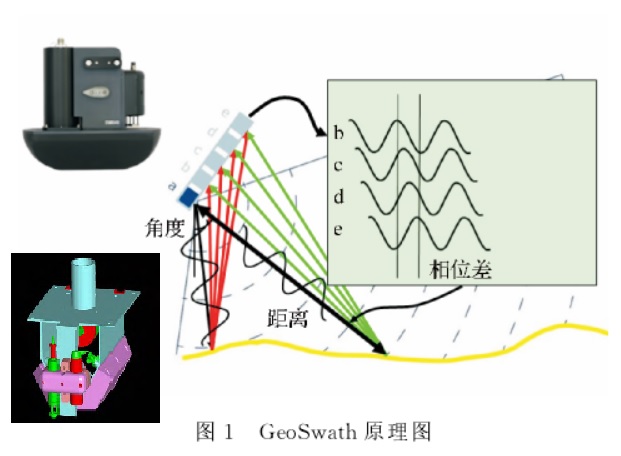
GeoSwath Plus It's England GeoAcoustics Ltd Products of the company , Yes 3 Types , The transmission frequencies are respectively 125、250 and 500KHz, Ben writing choose use 125KHz Of , because by The system system Should be use most widely , The other two types are similar , Only the resolution and range are different .GeoSwath Plus It consists of left and right transducers , a “V” Font type , Each set of transducers consists of 1 Emission primitives and 4 Receive primitives , The included angle with the vertical direction is 30°, The opening angle of single side beam is 120°. The transducer emits sector sound waves , The echo signal from the sea bottom is received by the receiver , Amplitude forms sonar image ,4 The phases of the echo signals received by the receiving boards are different , The spacing between receiving primitives is fixed , According to the principle of coherence , There is a fixed relationship between the phase difference of the echo received by them and the beam arrival angle , Then calculate the size of the angle of arrival , Compensation by rolling , Combined with the recorded beam propagation time, the depth and lateral position can be calculated ( chart 1)
{kind=link}
Klein3000 The dual frequency digital side scan sonar system consists of a transmitting transducer and a receiving transducer , The system consists of two transducer arrays, port and starboard , Every time individual in can device front branch by 100KHz and 500KHz Two transceivers , Each transceiver includes 1 Emission primitives and 2 Receive primitives . When the system works , The towing fish traveling with the ship produces two fan-shaped sound beams perpendicular to the forward direction of the ship , Scattering occurs when encountering objects on the seafloor or in water , The backscattered wave returns along the original propagation path , Received by transducer , Reflected on a recording paper or display , Form sonar image ( chart 2).
Uploading … Re upload cancel
The difference between the two lies in the traditional sonar Klein3000 Only the echo amplitude is recorded , And coherent sonar GeoSwath Record the amplitude of the echo 、 Echo time and phase difference , Water depth data and sonar images are obtained through data processing , The difference between the two receiving data , It also determines the different uses of the two .
Conventional side scan sonar Klein3000 Systems and coherent sonar GeoSwath Plus The comparison of basic parameters of the system is shown in the table 1 Shown .
{kind=link}
Uploading … Re upload cancel
Due to the limitation of echo intensity ,GeoSwath Plus Applicable to water depth not exceeding 200m In the shallow water , and Klein3000 Due to the use of drag and drop , Can be in no more than 2000m Within the sea area , The scope of use is better than GeoSwath Plus Big ; Traditional side scan sonar is installed by dragging , and GeoSwath Plus Fixed installation is adopted , At the same time as GeoSwath Plus The installation of altimeter and other equipment can better ensure the safety of the instrument .
Comparison of measured data
In a certain sea area GeoSwath Plus and Klein3000 Contrast experiment , The water depth in this area is about 40m.GeoSwath Plus Installed on the starboard side of the ship ,Klein3000 Adopt drag and drop installation , Use electric winch to retract and release cables , The height from the sea bottom shall be controlled within 20m about .
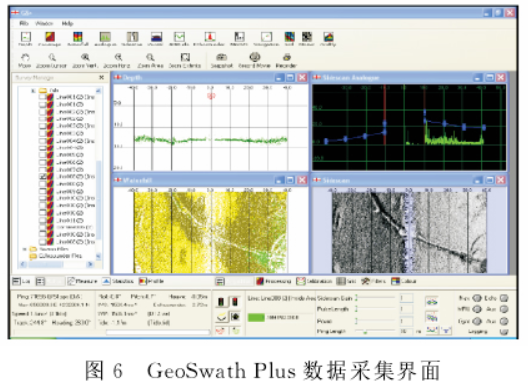
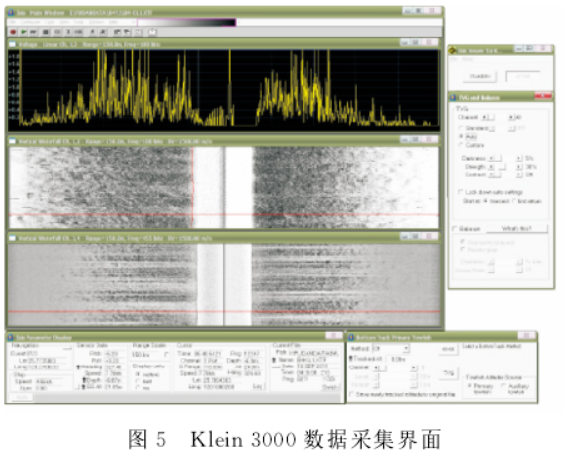
GeoSwath Plus send use GS+ soft Pieces of ,Klein3000 send use SonarPro Software for data collection . Selection of navigation equipment C-Nav3050M DGPS System , The coordinate system is WGS84, Use UTM Projection , The grid size is set to 0.25m. In order to compare the data collected by the two as well as possible , The processing software is Trition IsIs and TritonMap, In order to avoid the difference caused by the use of different processing software . Deploy in the experimental area 2 strip 3km Long line , among 1 An east-west line is used to detect the scour channel on the seafloor , another 1 A north-south line is used to detect the bedrock on the seabed , Use the same 1 Each ship uses Klein3000 and GeoSwath Plus To detect .
{kind=link}
{kind=link}
{kind=link}
Data volume comparison after data collection , Find the same distance Klein3000 The data file of is almost GeoSwath Plus Of 8 times , Found after analysis , Both are launched every second 10ping, but Klein3000 Every time ping The number of sampling points on one side is 2048 individual ,GeoSwath Plus Only 1024 individual ; In addition, due to Klein3000 yes 100KHz and 500KHz Dual frequency acquisition ,GeoSwath Plus It's just 125KHz Single frequency acquisition , Therefore, the file size is only Klein3000 Of 1/8 about .
Sonar image quality analysis
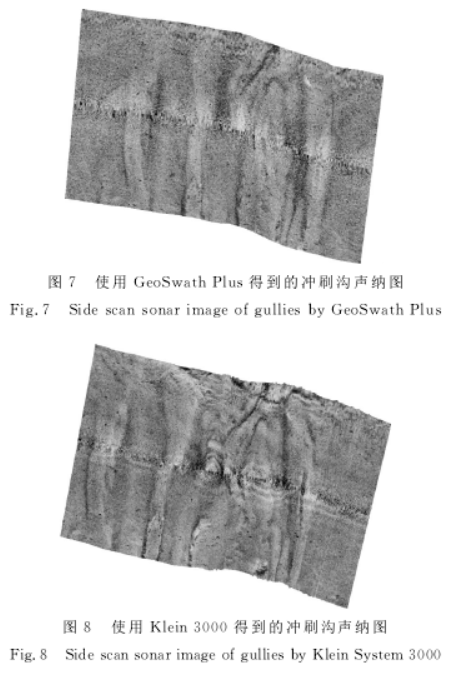
chart 7 Sum graph 8 Respectively GeoSwath Plus and Klein3000 The seabed scour channel detected , from GeoSwath Plus Only the approximate shape and trend of the scouring ditch can be seen from the sonar map ; and Klein3000 The obtained sonar map can not only see the approximate shape and trend of the scouring ditch , And it can show the details and shape of the scour ditch more carefully and clearly .
{kind=link}
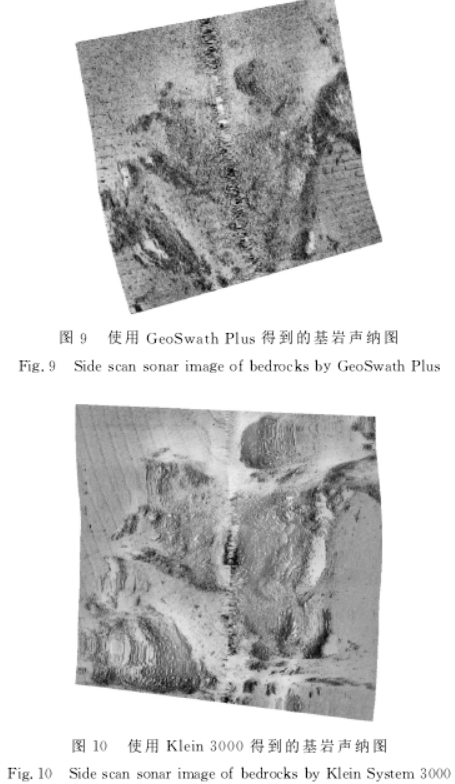
chart 9 and chart 10 branch other by GeoSwath Plus and Klein3000 Detected To Of The sea At the end of The base Rock , from GeoSwath Plus have to On the sonar map , The image can only show the bedrock , The shape of the bedrock cannot be clearly shown ; and Klein3000 The obtained sonar map can not only identify the bedrock , Moreover, it can show the distribution of bedrock more carefully and clearly 、 Shape and detail .
{kind=link}
Target size and location analysis
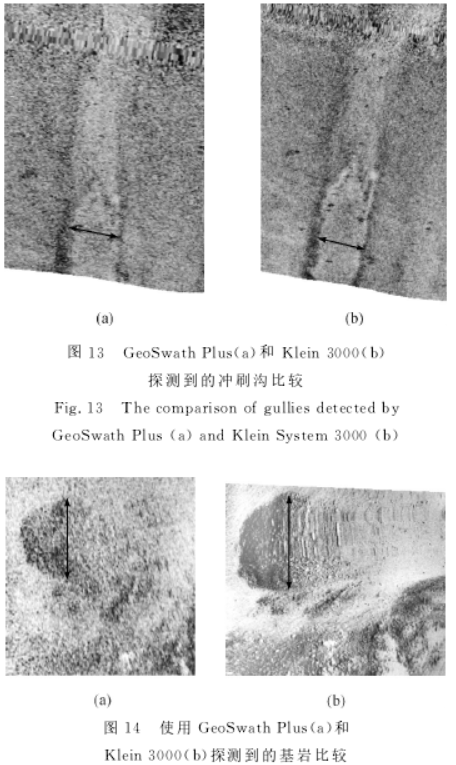
GeoSwath Plus The width of scour ditch detected is 20.4m( chart 13a), The base Rock District Of wide degree by 26.7 m( chart 14a),Klein3000 The width of the scouring ditch obtained is 19.9m( chart 13b), Width of bedrock area by 29.3m( chart 14b), As can be seen from the above data GeoSwath Plus and Klein3000 The width difference of the scour ditch obtained is small , And bedrock area Of wide degree phase Bad a Big , Mainly because GeoSwath Plus The contrast and clarity of the sonar image obtained are not as good as Klein3000, The edge of the bedrock area is not found , Therefore, the width of bedrock area measured is small .
Uploading … Re upload cancel
Klein3000 Get the location of scouring ditch and bedrock and GeoSwath Plus The positions obtained are different from each other 9.3m and 8.7m, This is an inherent problem of traditional side scan sonar , Although the electric winch is used to control the height of the towed fish from the sea bottom , And carry on Layback correct , But the positioning accuracy is still low , and GeoSwath Plus Fixed installation is adopted , Higher positioning accuracy .
{kind=link}
Conclusion
This article will GeoSwath Plus Systems and Klein3000 The system starts from the working principle 、 Technical parameters 、 The data acquisition and post-processing platform and the measured data are compared , The conclusion is as follows :
(1) Because of the number of records According to the class type save stay Bad different ,Klein3000 Only record back wave Of Vibration picture , and GeoSwath Plus be remember record return wave Of The amplitude 、 Echo time and phase difference , thus GeoSwath Plus No Only sonar images can be obtained , It can also obtain the precise position and water depth of each point . and Klein3000 The side scan sonar cannot obtain the precise position and water depth of each image point , This also determines that there is a great difference in the use of the two devices .
(2) Both are light in weight , Are portable , because GeoSwath Plus Fixed installation is adopted , Limited by echo intensity , Only applicable to water depth not exceeding 200m In the shallow water ; and Klein3000 Due to the use of drag and drop , But not more than 2000m Within the sea area , Wider range of use .
(3) In terms of data acquisition platform , because Klein3000 Earlier , There are more acquisition software available , and GeoSwath Plus Less acquisition software can be used , But it has more intuitive data quality monitoring function ; In terms of post-processing platform , Both have more software to choose from , Because of the number According to the The file contains water depth data ,GeoSwath Plus Higher requirements for post-processing software .
(4) In terms of practical application , For inherent reasons , Without using USBL Under the circumstances ,Klein3000 The positioning accuracy of is lower than GeoSwath Plus, But the sonar image is more delicate , Higher resolution , Clearer goals .
Comprehensive comparison and experimental analysis of coherent sonar multi beam and traditional multi beam bathymetric systems _ Xing Yuqing -2011
At present, the mainstream multi beam bathymetric systems can be divided into two categories in principle : 1) Traditional multi beam bathymetric system ; 2) Coherent sonar multibeam bathymetric system . These two types are in performance 、 What are the characteristics of reliability ? In this paper, the traditional multi beam Bathymetric System Seabeam 1180 And coherent sonar multibeam bathymetric system Geoswath Plus For example , Compare the similarities and differences between the two , It provides a reference for the introduction and selection of multi beam bathymetric system .
working principle
The traditional multi beam bathymetric system consists of a transmitting transducer and a receiving transducer , Transmit and receive sound energy signals of multiple beams in a fan shape , By measuring the reflection at a specific angle ( scattering ) Method of signal round trip time , have to To multiple water depth data corresponding to different angles . With Seabeam 1180 For example , The system consists of two transducer arrays, port and starboard , Each array includes 32 Primitives , All primitives participate in the launch , Each array fires simultaneously 7 Beams ; 16 Primitives participate in receiving , Beamforming receiver calculation 7 Receive directions , Calculate the water depth profile in the above beam direction by the seabed searcher , So as to obtain the water depth terrain data .
Coherent sonar multibeam bathymetric system is developed from side scan sonar , The method of calculating water depth is based on measuring reflection at a specific time ( scattering ) The angle of the echo signal . It is equivalent to arranging a series of side scan sonar transducers , The phase change on the vertical plane is given by electronic technology . This phase information can determine the reflection ( scattering ) The receiving angle of the sound wave and the travel time of the return pulse , Time difference between signals received by different transducers ( Phase difference ) Calculate the signal angle , Get the measurement result of oblique distance or angle . With Geoswath Plus For example , The system also contains two transducers , Each transducer includes 1 Transmitting units and 4 Receiving units . Within a wide range of vertical opening angles , Carry out sequential continuous angle measurement .
The main difference between the two in principle lies in , The traditional multi beam bathymetric system measures the reflection at a specific angle ( scattering ) Round trip time of signal ; The coherent sonar multi beam bathymetric system measures the reflection at a specific time ( scattering ) The angle of the echo signal .
Comparison of transmission and reception modes
Traditional multi beam bathymetric system Seabeam1180 Adopt rotary directional launch (rotational directional ransmission, abbreviation RDT) technology . In a sounding cycle there are 14 Two beams are transmitted at the same time , The receiving beamformer calculates in each transmission direction 3 Beams , Each beam angle is 1.5°, Center spacing of adjacent beams 1.25°, Above launch
The receiving process consists of 3 Group , That is, the system transmits and receives in sequence 3 Complete one complete sounding cycle at a time , In the process of beam transmitting and receiving, roll compensation is carried out in real time .RDT The application of the technology enables the system to transmit and receive a narrow beam angle width and greater than 36d B Sidelobe suppression , So as to obtain higher resolution .
As a coherent sonar multi beam sounding system Geoswath Plus, There is no actual directional beam on the beam transmission , Discrete beams are not physically formed , Instead, the signal processor uses the data in the reception buffer to generate a beam . The direction of the beam is determined by the travel time and phase difference of the received array signal . The coherent multi beam bathymetric system estimates the distance and azimuth of each point by detecting the propagation delay from each seabed signal point to different transducer units , The phase difference of the signal is detected by the electronic unit , Then the phase difference is converted into the included angle with the normal direction of the transducer . therefore , there “ beam ” It has no physical meaning , It is more of a mathematical process , Theoretically, the number of infinite beams can be calculated .
Resolution contrast
The multi beam bathymetric system sends beams to the seabed at a certain frequency , These beams are narrow along the track and wide along the vertical track , Form a fan-shaped propagation area . The receiving beam crosses the transmitting sector perpendicular to the keel , The beam in the vertical track direction is narrow . Cross area of transmitting beam and receiving beam , That is, the area irradiated by a beam on the seabed , That is, multi beam “ The footprints ”, It is an important index to measure the resolution of multi beam bathymetric system .
The traditional multi beam bathymetric system uses a complex transducer array ( Including conventional signal processing ), utilize −3d B The received signal is generated “ The footprints ”, The beam angle is from 0.5° To 6° Unequal , The horizontal resolution depends on the beam opening angle . The number of beams and independent sampling data can be as large as 240 individual . The overall coverage angle is usually at 120° To 150° Between , Thus, the maximum beam width is 4 To 7 times . Such as Seabeam 1180 The open angle is 1.5°, The number of beams is 126 individual , The overall coverage angle is 153°. Therefore, the horizontal resolution angle is 1.5°, The corresponding central beam has the highest resolution , The resolution decreases gradually to both sides . If in deep water 100m The flat bottom of the sea , The coverage width can reach 800m, The horizontal resolution of the central beam is 2.6m, Edge beam resolution increases to 40m.
The resolution of coherent sonar multi beam bathymetric system along the track direction depends on the opening angle of the transmitted beam in this direction , The resolution in the vertical track direction depends on the sampling rate , The closer it is to the outside of the beam, the more robust the detection of the beam is , And it can provide equal footprint water depth resolution , Therefore, there is no problem that the resolution of coherent sonar multi beam bathymetric system increases with the increase of the open angle of the transmitting sector in shallow water measurement , There is still a high data density at the edge of the strip . Such as Geoswath Plus The resolution along the course is 0.9°, The resolution in the direction perpendicular to the route is 0.02°. That is, in the depth of water 100m when , Geoswath Plus The resolution is 1.6m( Along the track )×0.03m( vertical track ).
The difference in data density between the two is : The traditional multi beam bathymetric system has the most dense data under the probe , The data on both sides is sparse compared with that in the middle . Coherent sonar is the opposite , The data directly below the probe is the most sparse , Data on both sides is dense . In terms of the amount of data collected , Traditional multi beam bathymetric system Seabeam 1180 The amount of data is small , Coherent sonar multibeam bathymetric system Geoswath Plus The amount of data obtained is quite large . If in deep water 20m when , Seabeam 1180 Every time Ping Generate 126 Water depth points , Geoswath Plus Every time Ping Generate 6800 Water depth points . In the depth of water 100m when , Seabeam 1180 The number of points does not change , Every time Ping Still 126 Water depth points , and Geoswath Plus Every time Ping Generate 42000 Water depth points .
The same thing is , Both of them have the trend that the more the outside data is, the lower the accuracy is , Both need to rely on high-precision motion sensors to determine the position and attitude .
Comparison of measured data
2007—2008 year , The South China Sea Engineering Survey Center of the State Oceanic Administration south The sea north Ministry Into the That's ok many wave beam transfer check , Its between stay north Ministry bay Yes Seabeam 1180 Multi beam system and Geoswath Plus The multi beam system is tested .
Density comparison of sounding data
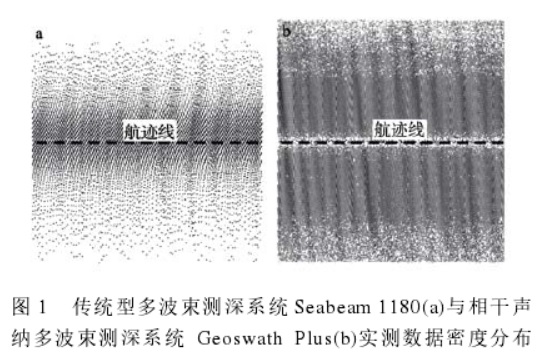
chart 1 It is a traditional multi beam sounding system Seabeam 1180 And coherent sonar multibeam bathymetric system Geoswath Plus Schematic diagram of data density distribution of collected data . The dotted line is the track line of the operation ship , Both sides of the dotted line are water depth data measured by multi beam . The average water depth in the sea area shown in the figure is 15m, Traditional multi beam bathymetric system Seabeam 1180 The coverage width is about 150m, The central water depth data is dense , Both sides are gradually sparse with the increase of footprints , The outermost footprints are spaced most approximately 5m. Coherent sonar multibeam bathymetric system Geoswath Plus The coverage width is about 160m, The central 5—10m The water depth data in the strip is sparse , The data density on both sides is relatively uniform , The outermost footprints are spaced most approximately 2m. From the figure 1 It can be seen that , Coherent sonar multibeam bathymetric system Geoswath Plus The data density is higher at the position far away from the track line , Higher horizontal resolution ; In the area near the track line, the traditional multi beam sounding system Seabeam 1180 More data density .
{kind=link}
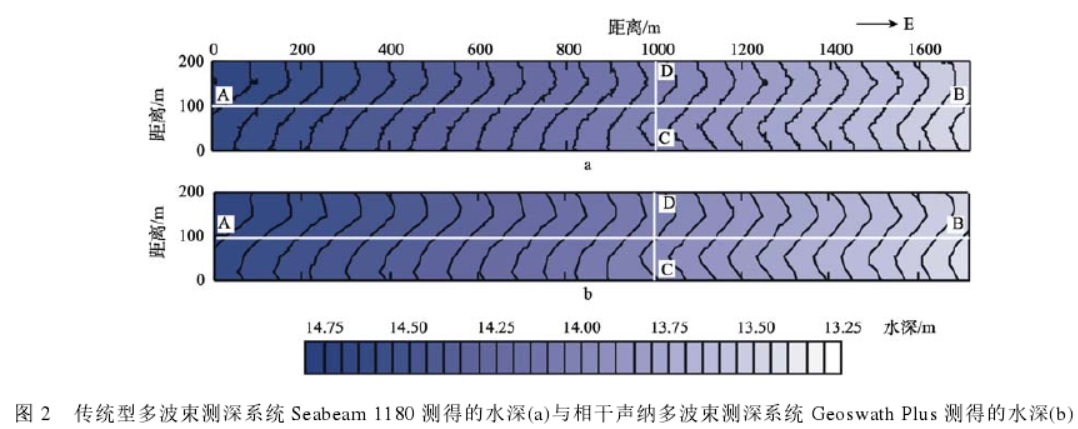
chart 2 It is a traditional multi beam sounding system Sea Beam1180 System and coherent sonar multi beam sounding system Geoswath Plus The topographic map obtained by the system through full coverage survey in the comparison area , Its water depth value is consistent with the change trend . In the original data measured by the two systems , Find the location in the terrain section A—B、C—D Water depth data points on , Use continuous water depth data points to draw topographic profile , Pictured 3、 chart 4.
Uploading … Re upload cancel
{kind=link}
Conclusion
1) The working principles of the two multi beam systems are completely different . Traditional multi beam bathymetric system Seabeam 1180 use RDT Mode for beam transmission , The beam obtained is limited ; Coherent sonar multibeam bathymetric system Geoswath plus There is no actual directional beam , Theoretically, the infinite beam can be calculated .
2) In terms of resolution , The data under the probe of traditional multi beam sounding system is dense , The data on both sides become thinner with the increase of footprints , The resolution drops rapidly ; The data directly below the probe of coherent sonar multi beam bathymetric system is sparse , The data on both sides of the probe is dense , The horizontal resolution of the outer edge is enhanced .
3) In terms of acquisition and post-processing platform , Coherent sonar multibeam bathymetric system Geoswath Plus The acquisition and processing software is integrated , It has intuitive data quality monitoring function , The post-treatment operation is simple ; Traditional multi beam bathymetric system Seabeam 1180 There are many post-processing software that can be applied , More features .
4) According to the current actual measurement results in shallow water area , The two systems have good consistency in data measurement accuracy , The standard deviation of the non-conforming sequence is 3%—4%;
in general , Both sets of multi beam systems have good measurement accuracy , It can meet the needs of bathymetric topographic survey in various complex environments . Traditional multi beam bathymetric system Seabeam 1180 The central beam is dense , The amount of data collected is small , The working water depth is greater , Post processing is flexible , However, due to the fixed number of beams , As the water depth increases , Increased footprint spacing , The outer edge data density is small , It is prone to footprint effect ; Coherent sonar multibeam bathymetric system Geoswath Plus High data density , It has more advantages in horizontal resolution and coverage width , It can reduce the line layout , Improve the efficiency of field measurement . Coherent sonar multibeam bathymetric system Geoswath plus More suitable for 200m In a shallow, simple, flat area , Such as inland waterway 、 Reservoir dam 、 Marine archaeology or pipeline exploration , Traditional multi beam bathymetric system Seabeam 1180 It is more suitable for areas with complex terrain , The deepest working water depth can reach 500—600m.
Summary
We used it Klein3000 And traditional multi beam , But it's not used GeoSwath, And I just saw this device recently . This device has both multi beam and side scan sonar functions , From the technical parameters , Pretty good . that , What is the effect of this device ? So we use keywords in HowNet GeoSwath Searched the relevant literature , Two papers have attracted our attention , One is GeoSwath Comparison with side scan sonar , One is GeoSwath Comparison with multi beam , That is, the above two papers in this paper . From the comparison results of the two literatures , We can see that ,GeoSwath It is inferior to side scan sonar in image resolution and fineness , The accuracy of bathymetry is not as good as that of multi beam , in other words ,GeoSwath Although it has the functions of multi beam and side scan sonar , But the single performance is not as good as that of professional equipment , Suitable for some specific application scenarios , For example, inland waterway or bay shoal with shallow water depth . Maybe , This is it. GeoSwath Why it is not widely used .
Pictures cannot be loaded , Please look at the public - many - Number
边栏推荐
- [technical notes]
- C#中的泛型
- tab[i = (n - 1) & hash] 的详细解读
- Single cell thesis record (Part12) -- unsupervised spatial embedded deep representation of spatial transcriptomics
- drop、truncate和delete的区别
- Breakthrough in rich device platform: dayu200 based on rk3568 enters the openharmony 3.1 release trunk
- 用蒙特卡洛法求圆周率pi
- GeoSwath plus 技术和数据采集处理
- 富设备平台突破:基于RK3568的DAYU200进入OpenHarmony 3.1 Release主干
- Frame profiling
猜你喜欢

Frame profiling

Surfer格网文件裁剪

从转载阿里开源项目 Egg.js 技术文档引发的“版权纠纷”,看宽松的 MIT 许可该如何用?

常用的辅助类—(重点)
![tab[i = (n - 1) & hash] 的详细解读](/img/be/3e84b3e8406833c2a235494f1a035f.png)
tab[i = (n - 1) & hash] 的详细解读

生产者和消费者问题

W800芯片平台进入OpenHarmony主干

Shengxin visualization (Part4) -- correlation diagram
W800 chip platform enters openharmony backbone

单细胞论文记录(part14)--CoSTA: unsupervised convolutional neural network learning for ST analysis
随机推荐
postgresql数据库中根据某个字段判断存在则更新(update)操作,不存在则插入(insert)
[Key review of cloud computing]
MFC tab control add Icon
单球机器人动力学与控制研究
swagger常用注解汇总
Single cell paper record (Part11) -- clustermap for multi-scale clustering analysis of spatial gene expression
【技术随记】
Inserting a classdiagram into markdown
Paging tool class pageutil < t >
信息系统项目管理 - 范围管理(划重点)
Single cell literature learning (Part2) -- stplus: a reference based method for the exact enhancement of St
clickhouse对比两台机器数据
StopWatch的使用
TiDB 社区线下交流会,天津 & 石家庄的小伙伴看过来~
D3D learning notes (1) - Introduction to the use conditions of autodraw at so stage
雷达导引头伺服系统的建模与仿真
Detailed interpretation of tab[i = (n - 1) & hash]
Single cell thesis record (Part12) -- unsupervised spatial embedded deep representation of spatial transcriptomics
线程池的三大方法
单细胞论文记录(part11)--ClusterMap for multi-scale clustering analysis of spatial gene expression