当前位置:网站首页>(二)面扫描仪与机械臂的手眼标定(眼在手外:九点标定)
(二)面扫描仪与机械臂的手眼标定(眼在手外:九点标定)
2022-07-26 09:28:00 【飞扬123_123】
1、配置opencv库与Eigen库
需用到opencv中矩阵运算
需用到Eigen中SVD分解算法
2、获取点
点相对于标定板坐标系的坐标
30 30 0
90 30 0
180 30 0
30 120 0
90 120 0
180 120 0
30 210 0
90 210 0
180 210 0
存为board.txt文件
点相对于相机坐标系的坐标
-24.6 115.6 869.1
-85.7 115.6 869.1
-171.3 119.7 869.1
-24.5 21.9 872.1
-85.9 21.9 872.1
-175.5 26.0 872.1
-28.6 -68.1 874.0
-90.0 -64.0 874.0
-176.0 -64.0 874.0
存为camera.txt文件
可以复制一份存为camera1.txt用于测试
获取点相对于机械臂基地坐标系的坐标
465.09 -109.00 70.64
405.09 -106.00 71.64
314.09 -101.00 72.64
473.09 -31.00 70.64
413.09 -30.00 71.64
321.09 -28.00 72.64
483.09 50.00 70.64
424.09 50.00 71.64
337.09 48.00 72.64
存为robot.txt
3、求解程序
#include <vector>
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
#include <map>
#include <fstream>
#include <sstream>
#include <Eigen/SVD>
#include <Eigen/Core>
#include<opencv2/core/eigen.hpp>
using namespace std;
using namespace cv;
using namespace Eigen;
void Solve_board2target(string target, Mat& T_board2camera, Mat& R_board2camera);
void test_camera2robot(cv::Mat H_camera2robot);
class coordinate {
public:
double x;
double y;
double z;
};
int main()
{
cv::Mat tempR, tempT;
cv::Mat R_board2camera, T_board2camera;
cv::Mat R_board2robot, T_board2robot;
cv::Mat H_board2camera = Mat::eye(4, 4, CV_64FC1);
cv::Mat H_board2robot = Mat::eye(4, 4, CV_64FC1);
string target;
//求板到机械臂末端的转换矩阵
target = "robot";
Solve_board2target(target, T_board2robot, R_board2robot);
tempT = T_board2robot.clone();
tempR = R_board2robot.clone();
tempR({
0,0,3,3 }).copyTo(H_board2robot({
0,0,3,3 }));
tempT({
0,0,1,3 }).copyTo(H_board2robot({
3,0,1,3 }));
cout << "board2robot:" << endl;
cout << H_board2robot << endl;
cout << "______________________________________" << endl;
//求板到相机的转换矩阵
target = "camera";
Solve_board2target(target, T_board2camera, R_board2camera);
tempT = T_board2camera.clone();
tempR = R_board2camera.clone();
tempR({
0,0,3,3 }).copyTo(H_board2camera({
0,0,3,3 }));
tempT({
0,0,1,3 }).copyTo(H_board2camera({
3,0,1,3 }));
cout << "board2camera:" << endl;
cout << H_board2camera << endl;
//求逆,相机到相板的转换矩阵
cv::Mat H_camera2board = H_board2camera.inv();
cout << "H_camera2board:" << endl;
cout << H_camera2board << endl;
cout << "______________________________________" << endl;
cv::Mat H_camera2robot = H_board2robot*H_camera2board;
cout << "camera2robot:" << endl;
cout << H_camera2robot << endl;
cout << "______________________________________" << endl;
test_camera2robot(H_camera2robot);
system("pause");
return 0;
}
//计算H_board2camera
//**************************************************************************
void Solve_board2target(string target, Mat& T_board2camera, Mat& R_board2camera)
{
//计算A2B
coordinate P_board, P_target, P_centroid;
vector<coordinate> v_board, v_target;
cv::Mat PA(3, 1, CV_64FC1);
cv::Mat PB(3, 1, CV_64FC1);
cv::Mat centroidA(3, 1, CV_64FC1);
cv::Mat centroidB(3, 1, CV_64FC1);
cv::Mat tempD, tempU, tempV;
cv::Mat H = Mat::zeros(3, 3, CV_64FC1);
cv::Mat tempH = Mat::eye(4, 4, CV_64FC1);
//读取点信息 并计算质心坐标
//------------------------------------------
P_centroid.x = 0;
P_centroid.y = 0;
P_centroid.z = 0;
//读取板上点的坐标并计算质心
ifstream fin;
fin.open("..//board.txt", ios::in);
while (!fin.eof())
{
fin >> P_board.x >> P_board.y >> P_board.z;
///cout << P_board.x << " " << P_board.y << " " << P_board.z << endl;
v_board.push_back(P_board); //存储
P_centroid.x = P_centroid.x + P_board.x;
P_centroid.y = P_centroid.y + P_board.y;
P_centroid.z = P_centroid.z + P_board.z;
}
fin.close();
//计算质心
centroidA.at<double>(0.0) = P_centroid.x / v_board.size();
centroidA.at<double>(1.0) = P_centroid.y / v_board.size();
centroidA.at<double>(2.0) = P_centroid.z / v_board.size();
///cout << "centroidA:" << endl;
///cout << centroidA << endl;
//读取相机中点的坐标
P_centroid.x = 0;
P_centroid.y = 0;
P_centroid.z = 0;
if (target == "camera")
{
fin.open("..//camera.txt", ios::in);
}
else if (target == "robot")
{
fin.open("..//robot.txt", ios::in);
}
else
{
cout << "targe输入有误!!" << endl;
return;
}
while (!fin.eof())
{
fin >> P_target.x >> P_target.y >> P_target.z;
///cout << P_target.x << " " << P_target.y << " " << P_target.z << endl;
v_target.push_back(P_target); //存储
P_centroid.x = P_centroid.x + P_target.x;
P_centroid.y = P_centroid.y + P_target.y;
P_centroid.z = P_centroid.z + P_target.z;
}
fin.close();
//计算质心
centroidB.at<double>(0.0) = P_centroid.x / v_target.size();
centroidB.at<double>(1.0) = P_centroid.y / v_target.size();
centroidB.at<double>(2.0) = P_centroid.z / v_target.size();
//计算H矩阵
//--------------------------------------------------------------
for (int i = 0; i < v_board.size(); i++)
{
PA.at<double>(0, 0) = v_board[i].x;
PA.at<double>(1, 0) = v_board[i].y;
PA.at<double>(2, 0) = v_board[i].z;
PB.at<double>(0, 0) = v_target[i].x;
PB.at<double>(1, 0) = v_target[i].y;
PB.at<double>(2, 0) = v_target[i].z;
H = H + (PA - centroidA)*((PB - centroidB).t());
}
///cout << "H:" << endl;
///cout << H << endl;
Eigen::MatrixXd SVD_H(3, 3);
cv2eigen(H, SVD_H); //Mat矩阵转Eigen矩阵
//SVD分解(H) 并计算旋转矩阵与平移矩阵
//------------------------------------------------------------------
///cout << "SVD_H:" << endl;
///cout << SVD_H << endl;
SVD::compute(H, tempD, tempU, tempV, 0);
//-------------------------------------------------------------------
// 进行svd分解
Eigen::JacobiSVD<Eigen::MatrixXd> svd_holder(SVD_H,
Eigen::ComputeThinU |
Eigen::ComputeThinV);
// 构建SVD分解结果
Eigen::MatrixXd U = svd_holder.matrixU();
Eigen::MatrixXd V = svd_holder.matrixV();
Eigen::MatrixXd D = svd_holder.singularValues();
//--------------------------------------------------------------------
//eigen矩阵转Mat矩阵
eigen2cv(U, tempU);
eigen2cv(V, tempV);
eigen2cv(D, tempD);
//计算标定板到相机的旋转矩阵和平移矩阵
R_board2camera = tempV * (tempU.t());
T_board2camera = centroidB - (R_board2camera * centroidA);
}
//测试camera2robot
void test_camera2robot(cv::Mat H_camera2robot)
{
coordinate P_camera;
vector<coordinate> v_camera;
cv::Mat PTemp (4, 1, CV_64FC1);
cv::Mat PCamera(4, 1, CV_64FC1);
cv::Mat PRobot (4, 1, CV_64FC1);
ifstream fin;
fin.open("..//camera1.txt", ios::in);
while (!fin.eof())
{
fin >> P_camera.x >> P_camera.y >> P_camera.z;
cout << P_camera.x << " " << P_camera.y << " " << P_camera.z << endl;
v_camera.push_back(P_camera); //存储
}
fin.close();
double tempAA[1][3];
for (int i = 0; i < v_camera.size(); i++)
{
cout << i << endl;
PTemp.at<double>(0, 0) = v_camera[i].x;
PTemp.at<double>(1, 0) = v_camera[i].y;
PTemp.at<double>(2, 0) = v_camera[i].z;
PTemp.at<double>(3, 0) = 1;
PCamera = PTemp.clone();
///cout << "PCamera:" << endl;
///cout << PCamera << endl;
///cout << "H_camera2robot" << endl;
///cout << H_camera2robot << endl;
//cout << H_camera2robot << endl;
PRobot = H_camera2robot * PCamera;
///cout << "PRobot:" << endl;
///cout << PRobot << endl;
tempAA[0][0] = PRobot.at<double>(0, 0);
tempAA[0][1] = PRobot.at<double>(1, 0);
tempAA[0][2] = PRobot.at<double>(2, 0);
cout << tempAA[0][0] << " " << tempAA[0][1] << " " << tempAA[0][2] << endl;
}
}
边栏推荐
猜你喜欢


![[MySQL] how to execute an SQL statement (2)](/img/7b/53f8756458cc318e2f417b1cc0c3f8.png)

![[Online deadlock analysis] by index_ Deadlock event caused by merge](/img/67/0a02ad248c3ab21d3240e12aa23313.png)

随机推荐
matlab中的AR模型短时预测交通流
Mysql事务
arcgis的基本使用4
Zipkin installation and use
el-table实现增加/删除行,某参数跟着变
Drawing shadow error diagram with MATLAB
Windows通过命令备份数据库到本地
[MySQL] detailed explanation of redo log, undo log and binlog (4)
TableviewCell高度自适应
Source code analysis of object wait notify notifyAll
Table extraction for opencv table recognition (2)
Object 的Wait Notify NotifyAll 源码解析
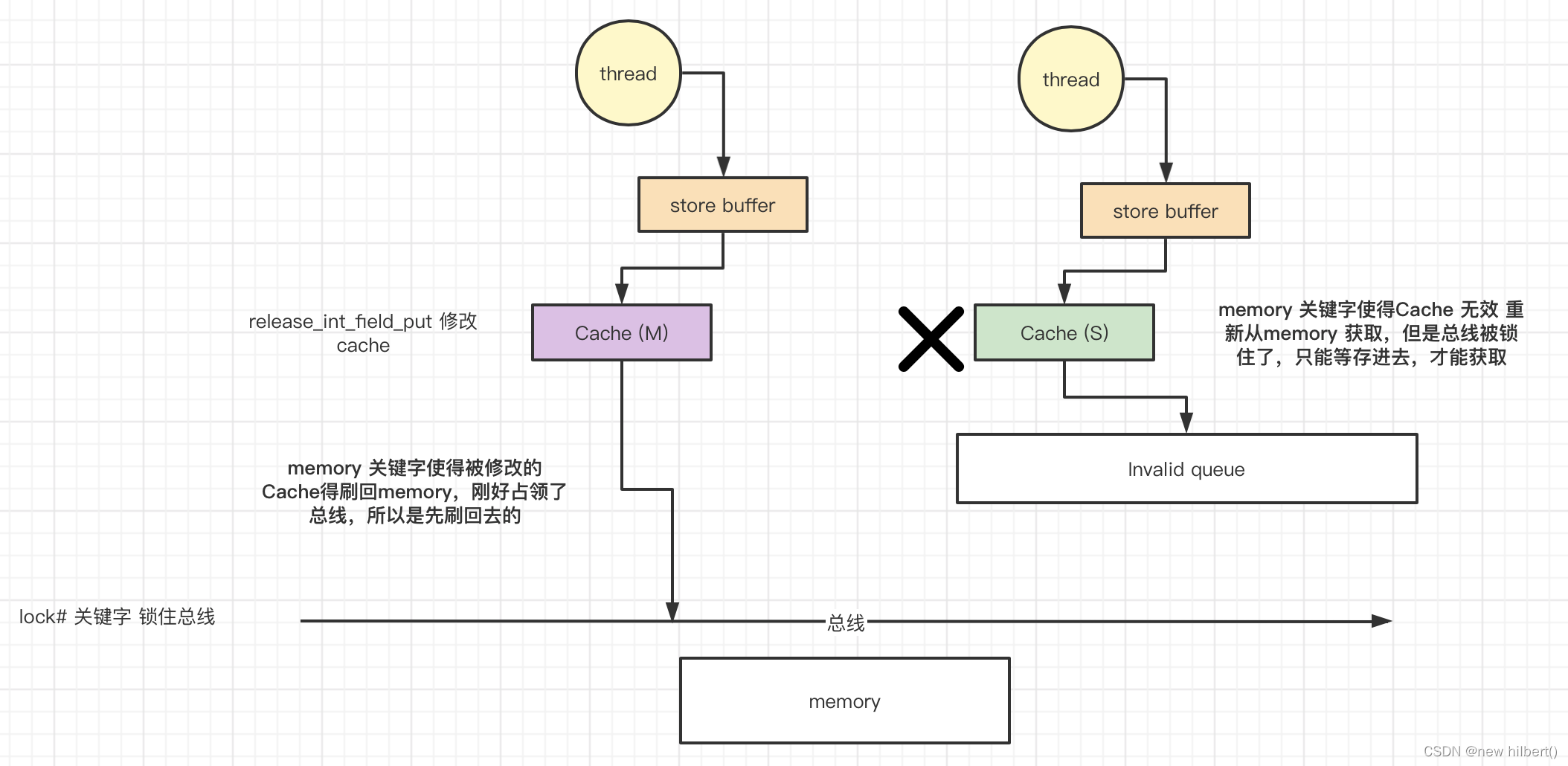
Does volatile rely on the MESI protocol to solve the visibility problem? (next)
神经网络与深度学习-6- 支持向量机1 -PyTorch
面试题目大赏
arcgis的基本使用1
Order based evaluation index (especially for recommendation system and multi label learning)
青少年软件编程等级考试标准解读_二级
arc-gis基础操作3
Custom password input box, no rounded corners