当前位置:网站首页>动作捕捉系统用于苹果采摘机器人
动作捕捉系统用于苹果采摘机器人
2022-07-01 15:50:00 【MocapLeader】
随着我国农业产业化结构调整和互联网+模式的兴起,水果种植对于农民创收起到重要作用。相比于已实现种植收割全自动化主要粮食作物(如小麦、玉米),目前苹果、梨果等表皮薄易损伤的水果仍然需要人工采摘,这极大提高了人工成本,而且攀爬作业有很大的危险性。因此开发机械化的苹果收获机器人具有重要的现实意义。
苹果收获机器人主要包括视觉系统和带有末端执行器的机械臂两部分,涵盖了机器视觉、图像处理、机器人运动学、多传感器融合等多项技术。虽然国内外科研人员已经开发了多款苹果收获机器人,但是目前仍存在很多问题待解决,比如缺乏果肉损伤程度评估、枝条-果柄-果实的建模方法和果实分离机理认识不够深入等。
为了降低采摘过程中苹果果肉的损伤,西北农林科技大学的研究人员围绕苹果收获机器人采摘姿态优化展开研究。首先研究人员建立了枝条、果柄、果实有限元模型,并对比Abaqus仿真结果和试验结果进行验证,为末端执行器抓握和损伤评估以及采摘动作优化提供理论依据。
由于机械臂的采摘动作直接影响果实采摘效果,为了使苹果收获机器人采摘效果接近人工,研究人员使用NOKOV度量动作捕捉系统,采集人工采摘苹果时上臂动作,再控制机械臂按照其轨迹路径实现采摘动作。

场地周围布置8个NOKOV度量动作捕捉相机,在测试人的肩关节、肘关节、腕关节和指尖上粘贴反光标识点,利用NOKOV度量动作捕捉系统跟踪记录人采摘苹果时的轨迹数据,并选取指尖轨迹数据进行研究分析,用于机械臂的轨迹规划


参考文献:
[1]卜令昕.结构化果园苹果收获机器人关键技术研究[D].西北农林科技大学,2021.DOI:10.27409/d.cnki.gxbnu.2021.000038.
边栏推荐
- 新出生的机器狗,打滚1小时后自己掌握走路,吴恩达开山大弟子最新成果
- 智慧党建: 穿越时空的信仰 | 7·1 献礼
- C#/VB.NET 合并PDF文档
- When ABAP screen switching, refresh the previous screen
- Some abilities can't be learned from work. Look at this article, more than 90% of peers
- DO280管理应用部署--pod调度控制
- STM32F1与STM32CubeIDE编程实例-PWM驱动蜂鸣器生产旋律
- Go语学习笔记 - gorm使用 - 表增删改查 | Web框架Gin(八)
- TensorFlow团队:我们没被抛弃
- [target tracking] | template update time context information (updatenet) "learning the model update for Siamese trackers"
猜你喜欢
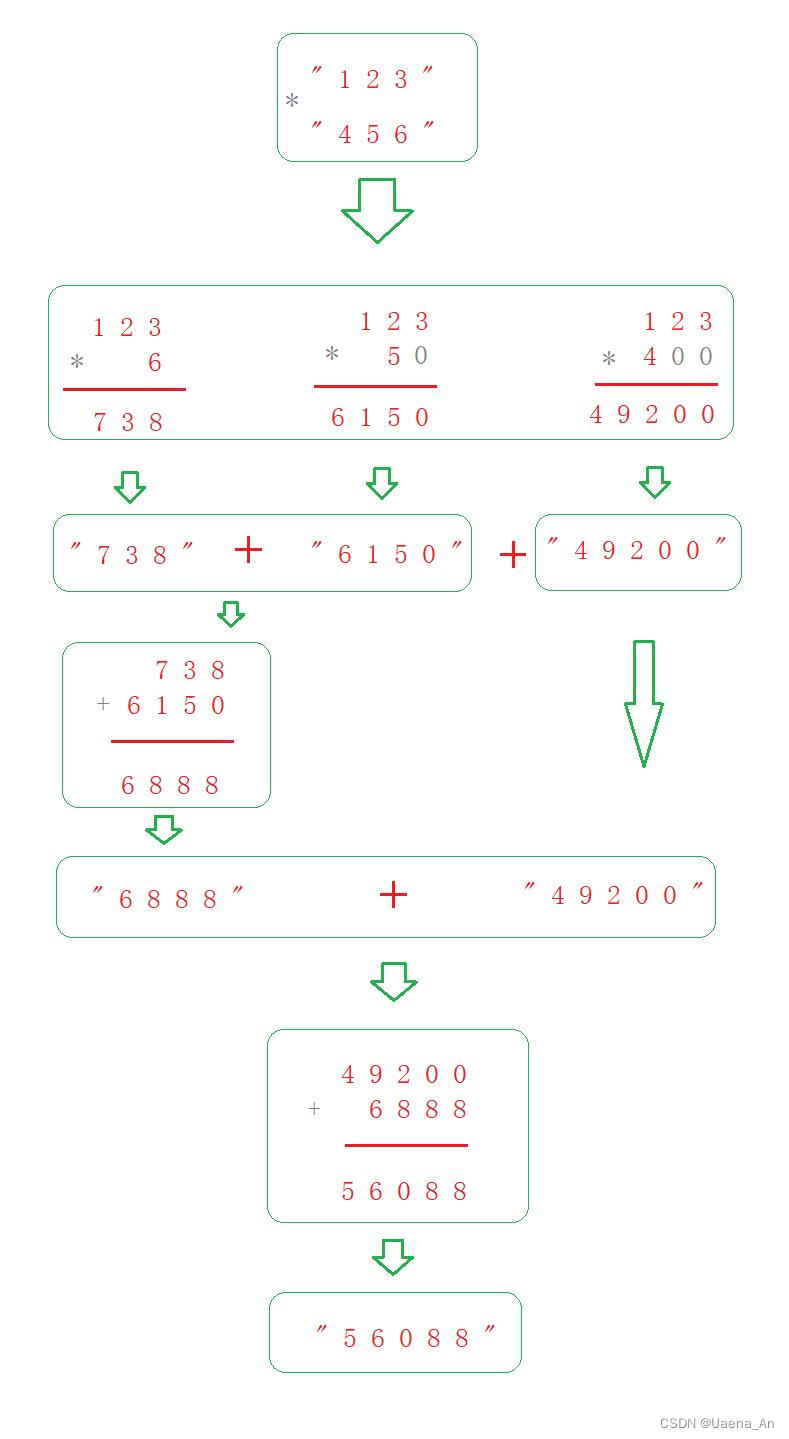
【LeetCode】43. String multiplication
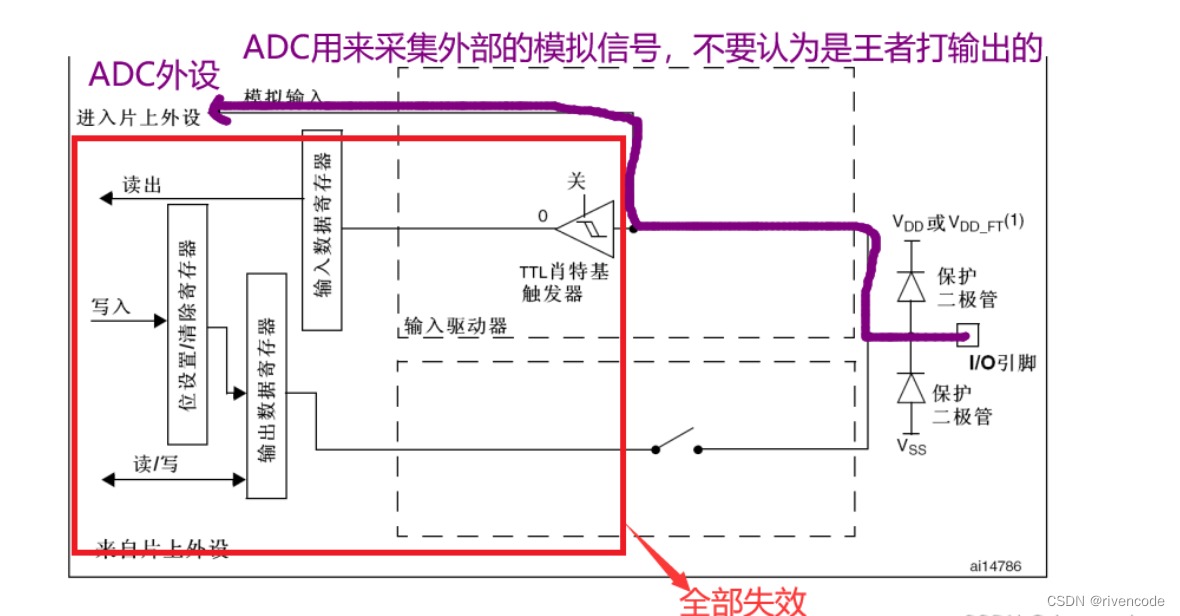
STM32ADC模拟/数字转换详解

ATSS:自动选择样本,消除Anchor based和Anchor free物体检测方法之间的差别

Please, stop painting star! This has nothing to do with patriotism!

华为发布HCSP-Solution-5G Security人才认证,助力5G安全人才生态建设
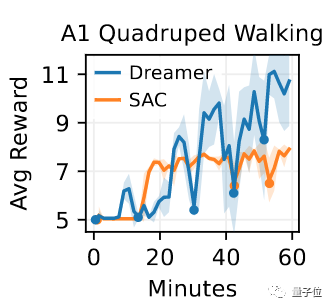
新出生的机器狗,打滚1小时后自己掌握走路,吴恩达开山大弟子最新成果
![[one day learning awk] conditions and cycles](/img/e6/c96a4fd6ced9b492e70a06004f5159.png)
[one day learning awk] conditions and cycles
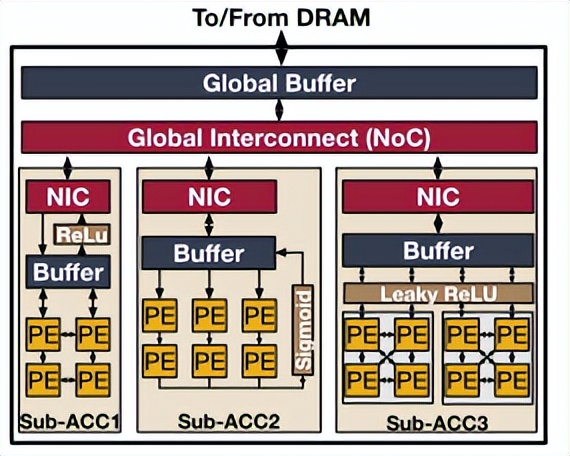
ADS算力芯片的多模型架构研究

嵌入式开发:5个修订控制最佳实践

2023届春招实习-个人面试过程和面经分享
随机推荐
laravel的模型删除后动作
Pnas: brain and behavior changes of social anxiety patients with empathic embarrassment
大龄测试/开发程序员该何去何从?是否会被时代抛弃?
Rhcsa fourth day operation
[one day learning awk] function and user-defined function
软件测试的可持续发展,必须要学会敲代码?
自动、智能、可视!深信服SSLO方案背后的八大设计
Automatique, intelligent, visuel! Forte conviction des huit conceptions derrière la solution sslo
华为发布HCSP-Solution-5G Security人才认证,助力5G安全人才生态建设
DO280管理应用部署--pod调度控制
[target tracking] |stark
Zhang Chi Consulting: household appliance enterprises use Six Sigma projects to reduce customers' unreasonable return cases
ADS算力芯片的多模型架构研究
2023届春招实习-个人面试过程和面经分享
Telecommuting experience? Let's introduce ourselves ~ | community essay solicitation
搜索框和按钮缩放时会有缝隙的bug
【LeetCode】43. String multiplication
Where should older test / development programmers go? Will it be abandoned by the times?
Idea start command line is too long problem handling
【php毕业设计】基于php+mysql+apache的教材管理系统设计与实现(毕业论文+程序源码)——教材管理系统