当前位置:网站首页>Openbionics exoskeleton project introduction | bciduino community finishing
Openbionics exoskeleton project introduction | bciduino community finishing
2022-07-04 01:20:00 【Programmer base camp】
Exoskeleton glove project 
In the last ten years , soft 、 Under actuated and compliant robot exoskeleton gloves have attracted more and more attention . Possible applications of these systems range from enhancing the ability of healthy people to restoring the mobility of paralyzed or stroke patients . Although significant progress has been made in this area , But most existing solutions are still bulky and expensive , They need external power to work , And not wearable . In this project , Designers are committed to developing an adaptive ( Underactuated and compliant )、 Tendon drive 、 Wearable exoskeleton gloves , A compact 、 economic 、 Portable auxiliary equipment , Provide users with enhanced crawling ability .
explain
The innovation of this project is to enhance the grip ability of users , The operation is simple and intuitive , Strong autonomy , Little maintenance , The cost is low .
The device consists of four different parts : Differential module 、 Soft gloves 、 Tendon tensioning and adjusting mechanism and harness ( See above ).
The gripping force of the gripping module is evenly distributed . This special differential mechanism can also be applied to different underactuated prosthetics and orthopedic systems . be based on whiffletre The differentiator of mechanism is widely used in underactuated manipulator . The differential is divided into three different parts : Ratchet clutch 、 Linear ratchet and spring-loaded whip mechanism . The ratchet clutch mechanism includes a ratchet pulley block for wrapping tendons 、 A pawl preventing the ratchet wheel from rotating in one direction and an elastic element , The elastic element acts as a spring , Push the pawl towards the ratchet , Thus limiting the movement of the pawl in the other direction . The mechanism can accurately adjust the length of the tendon ( Accuracy of 87.mm).
The purpose of using this mechanism is to adjust the length of multiple tendons passing through the tendon wiring tube and reaching the glove . In order to keep the tendon in tension for a long time , Linear ratchet is used . This mechanism ensures that the tendons are locked in one position , Until the mechanism is used again . The mechanism consists of a row of “V” Profile tooth 、 leverage 、 Guide 、 The base is composed of two springs . The guide rail is fixed on the differential module by screws , The base can slide on the guide rail , Ensure that the movement of the base always occurs on the single axis . When pulling the upper cable , The spring will push the lever against the teeth , Until the system reaches the desired position . then , The lever slides into one of them “V” Gear locking mechanism and keep the tension constant . When the system is reconnected , The joystick is pulled onto the channel again , The spring connecting the base and the differential module wall pulls the base , Until the lever reaches the lowest position , The tendon is restored to its initial tension . When pulling the upper cable again , Loop reinitialization . The ability to keep tendons tensioned for a long time is critical for underdrive and body dynamics , Because other tendons drive 、 Motorized solutions ( Such as full drive system ) in , The special motor can adjust the tension of the tendon and maintain the load while grasping and manipulating the object .
The body's dynamic mechanism allows power from the upper body ( Like shoulders ) It is transmitted to the index finger through the tendon wiring system 、 Middle finger and thumb . Simple body exercises can increase the tension of tendons , So as to drive the soft exoskeleton gloves . The differential mechanism is used to distribute the force evenly to the fingers . So , A tension adjusting device must be designed to operate the cable accurately . The mechanism consists of a base connecting parts 、 A lever 、 A pulley with rectangular teeth 、 A cover and a retractable drum . After putting on the mechanism , The user presses a lever , Cable on drum ( Separate from tendons ) Rotate the pulley counterclockwise , Wrap the drive tendon around the pulley and tension . The plastic cover ensures that the cable will not slide out of the pulley channel .
The recommended seat belt is selected as the body power unit , Because it is comfortable , Helps keep shoulders aligned . When the right arm or shoulder transmits force to the main cable , The differential is pulled , The artificial tendon of the finger is strained . These tendons are responsible for moving fingers .
# By BCIduino BCI open source community original / Reprint ( official account “BCIduino BCI community ”).BCIduino Brain computer interface community is from Beijing University of Aeronautics and Astronautics 、 Cornell University 、 Peking University, 、 The Capital Medical University and other masters and doctors initiated the establishment of , Welcome to join the community by scanning the following code , Also welcome to purchase BCIduino EEG module 、EMGduino EMG module 、EXOduino Exoskeleton of hand 、EDUduino Single channel EEG module ( Search a treasure or scan the code for details ).
Our equipment
- BCIduino It is a low-cost EEG device developed by Hangyi biology for entry-level enthusiasts , It can collect data wirelessly in real time 8 Channel high accuracy 24 Bit EEG data , compatible Matlab/python/ Android / Raspberry pie / Orange school /ubuntu/mac And other equipment or systems , It can meet the basic enthusiast level EEG data acquisition experimental operation .
- EMGduino It is a low-cost EMG acquisition device , sampling frequency 1000Hz, Wired data collection , compatible Windows System , Data can be passed through LSL Data stream for transmission .

边栏推荐
- Typescript basic knowledge sorting
- Audio resource settings for U3D resource management
- Force deduction solution summary 1189- maximum number of "balloons"
- 【.NET+MQTT】.NET6 环境下实现MQTT通信,以及服务端、客户端的双边消息订阅与发布的代码演示
- Summary of common tools and technical points of PMP examination
- Infiltration learning diary day19
- Network layer - routing
- How to delete MySQL components using xshell7?
- CesiumJS 2022^ 源码解读[8] - 资源封装与多线程
- 查询效率提升10倍!3种优化方案,帮你解决MySQL深分页问题
猜你喜欢
Mobile asynchronous sending SMS verification code solution -efficiency+redis

MySQL introduction - functions (various function statistics, exercises, details, tables)
Release and visualization of related data
Hash table, string hash (special KMP)
![[dynamic programming] leetcode 53: maximum subarray sum](/img/f0/80357f9ffc556f3ed4d3aa0901bb1d.jpg)
[dynamic programming] leetcode 53: maximum subarray sum
![Cesiumjs 2022^ source code interpretation [8] - resource encapsulation and multithreading](/img/d2/99932660298b4a4cddd7e5e69faca1.png)
Cesiumjs 2022^ source code interpretation [8] - resource encapsulation and multithreading

Beijing invites reporters and media

Unity Shader入门精要读书笔记 第三章 Unity Shader基础
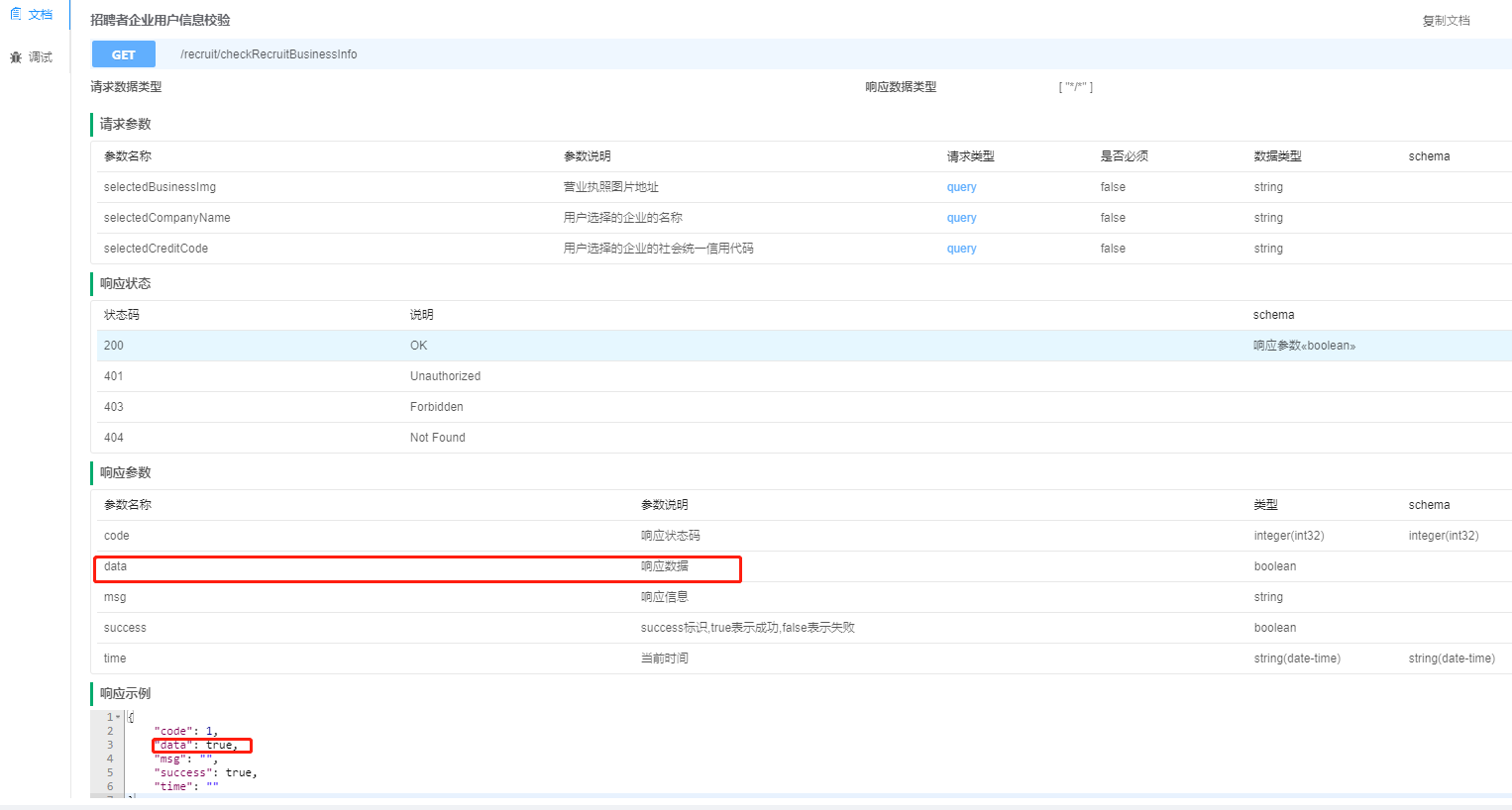
swagger中响应参数为Boolean或是integer如何设置响应描述信息

Regular expression of shell script value
随机推荐
Function: find the approximate value of the limit of the ratio of the former term to the latter term of Fibonacci sequence. For example, when the error is 0.0001, the function value is 0.618056.
Leetcode 121 best time to buy and sell stock (simple)
Regular expression of shell script value
A malware detection method for checking PLC system using satisfiability modulus theoretical model
Functions and arrays of shell scripts
Audio resource settings for U3D resource management
leetcode 121 Best Time to Buy and Sell Stock 买卖股票的最佳时机(简单)
Sequence list and linked list
CesiumJS 2022^ 源码解读[8] - 资源封装与多线程
Make drop-down menu
All in one 1412: binary classification
2-redis architecture design to use scenarios - four deployment and operation modes (Part 2)
删除所有值为y的元素。数组元素中的值和y的值由主函数通过键盘输入。
A-Frame虚拟现实开发入门
Pratique technique | analyse et solution des défaillances en ligne (Partie 1)
How to use AHAS to ensure the stability of Web services?
Function: store the strings entered in the main function in reverse order. For example, if you input the string "ABCDEFG", you should output "gfedcba".
12. Go implementation of integer to Roman numeral and leetcode
Mongodb learning notes: command line tools
Huawei BFD and NQA