当前位置:网站首页>狗都能看懂的Vision Transformer的讲解和代码实现
狗都能看懂的Vision Transformer的讲解和代码实现
2022-08-04 05:34:00 【热血厨师长】
1、ViT介绍
从深度学习暴发以来,CNN一直是CV领域的主流模型,而且取得了很好的效果,相比之下,基于self-attention结构的Transformer在NLP领域大放异彩。虽然Transformer结构已经成为NLP领域的标准,但在计算机视觉领域的应用还非常有限。
ViT(vision transformer)是Google在2020年提出的直接将Transformer应用在图像分类的模型,通过这篇文章的实验,给出的最佳模型在ImageNet1K上能够达到88.55%的准确率(先在Google自家的JFT数据集上进行了预训练),说明Transformer在CV领域确实是有效的,而且效果还挺惊人。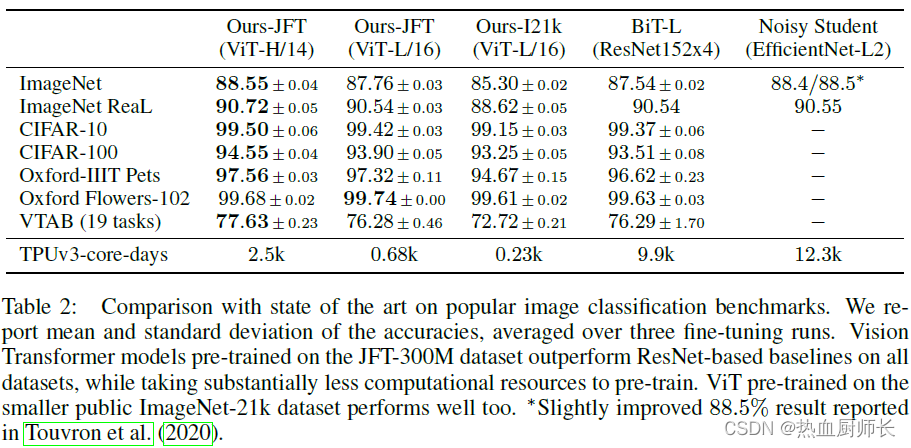
2、模型详解
在讲解ViT原理之前,读者需要有self-attention的相关知识,之前博文有讲过,这里就不复述了。
下图是Vision Transformer的结构,乍一看和self-attention的结构非常像。主要由三个模块组成:
- Linear Projection (Patch + Position 的Embedding层)
- Transformer Encoder(详细结构见图右边)
- MLP Head(分类层)
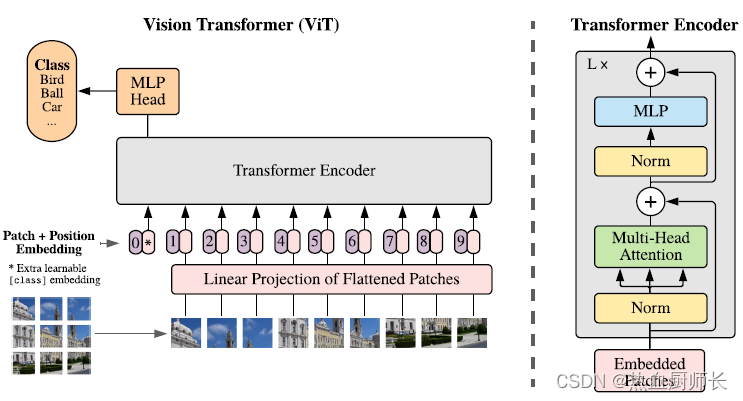
Embedding层详解
从图中看,Transformer Encoder读入的是一小块一小块这样的图片。这样做的原因是:将一个个小块图像视为token(token可以理解为NLP中的一个字或词),在Transformer中计算每个token之间的相关性。这一点就和卷积神经网络有很大区别了。以往的CNN,以卷积 + 池化的方式不断下采样,这样理论上模型可以通过加深模型深度,达到增大感受野的目的。不过这样会有两个缺点:
- 实际结果中显示,CNN对边缘的响应很弱。这也非常好理解,越靠边缘的像素,因为被卷积次数少,自然在梯度更新时,贡献更少。
- CNN只能和临近像素计算相关性。由于其滑窗卷积的特性,无法对非领域的像素共同计算,例如左上角的像素无法和右下角的像素联合卷积。这就导致了某些空间信息是无法利用的。同时根据MAE论文中所说的,自然图像具有冗余性,即相邻像素点代表的信息是差不多的,所以只计算领域像素无法最大化利用图像特征。
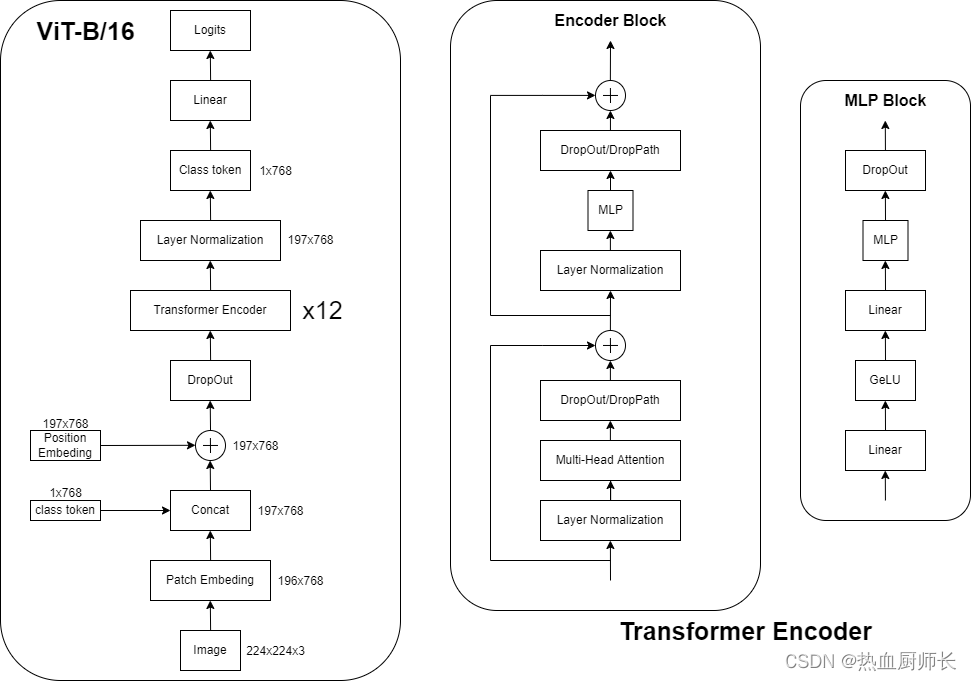
回到ViT中,仅仅把图像拆分成小块(patch)是不够的,Transformer Encoder需要的是一个向量,shape为[num_token, token_dim]。对于图片数据来说,shape为[H,W,C]是不符合要求的,所以就需要转换,要将图片数据通过这个Embedding层转换成token。以ViT-B/16为例:
假设输入图像为224x224x3,一个token原始图像shape为16x16x3,那这样就可以将图像拆分成 ( 224 / 16 ) 2 = 196 (224/16)^2 = 196 (224/16)2=196个patch,然后将每个patch线性映射至一维向量中,那么这个一维向量的长度即为 16 ∗ 16 ∗ 3 = 768 16*16*3=768 16∗16∗3=768维。将196个token叠加在一起最后维度就是[196, 768]。
在代码实现中,patch的裁剪是用一个patch_size大小的卷积以image_size // patch_size的步长进行卷积实现的:
class PatchEmbed(nn.Module):
""" 2D Image to Patch Embedding """
def __init__(self, image_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
""" Map input tensor to patch. Args: image_size: input image size patch_size: patch size in_c: number of input channels embed_dim: embedding dimension. dimension = patch_size * patch_size * in_c norm_layer: The function of normalization """
super().__init__()
image_size = (image_size, image_size)
patch_size = (patch_size, patch_size)
self.image_size = image_size
self.patch_size = patch_size
self.grid_size = (image_size[0] // patch_size[0], image_size[1] // patch_size[1])
self.num_patches = self.grid_size[0] * self.grid_size[1]
# The input tensor is divided into patches using 16x16 convolution
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
B, C, H, W = x.shape
assert H == self.image_size[0] and W == self.image_size[1], \
f"Input image size ({
H}*{
W}) doesn't match model ({
self.image_size[0]}*{
self.image_size[1]})."
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
同时需要注意的是,token可以添加位置编码。由于self-attention的机制,在没有字符位置的情况下,“我爱你”和“你爱我”的计算结果是一样的。所以当添加了位置编码,分类准确率将会更高。所以迁移到ViT的Embeding层中,位置信息是以Add的方式融合在输入tensor中的。
另外,输入tensor还需要有一个class token(分类层),数据格式和其他token一样,长度为768的向量,与位置编码的融合方式不一样,这里做的是Concat,这样做是因为分类信息是在后面需要取出来单独做预测的,所以不能以Add方式融合,shape也就从[196, 768]变为[197, 768]。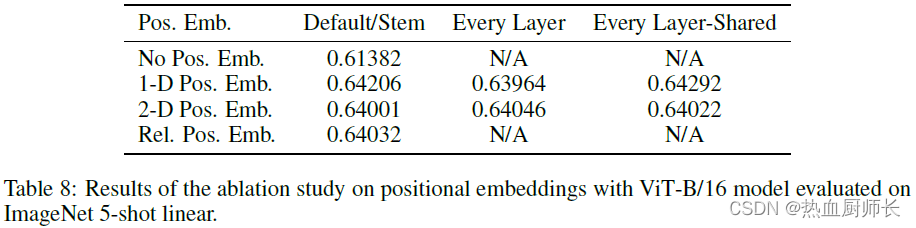
Transformer Encoder详解
Transformer Encoder也就是堆叠encoder block几次,和常规的CNN类似,主要由几个部分组成:
- Layer Normalization
相比于Batch Normalization来说,BN是针对所有的样本,对某一个特征图计算均值和方差,然后然后对这个特征图神经元做归一化。LN是对某一个样本,计算该样本所有特征图的均值和方差,然后对这个样本做归一化。BN适用于不同mini batch数据分布差异不大的情况,而且BN需要开辟变量存每个节点的均值和方差,空间消耗略大;而且 BN适用于有mini_batch的场景。LN只需要一个样本就可以做归一化,可以避免 BN 中受 mini-batch 数据分布影响的问题,也不需要开辟空间存每个节点的均值和方差。 - Multi-Head Attention
这个结构是self-attention中的一种,在之前的博客中有详细的讲解。 - DropOut/DropPath
论文中描述是使用了DropOut,但实际别人复现的代码中使用的是DropPath。两者对最后的结果影响不大,这里也不展开详细说了。 - MLP Block
如下图右侧所示,即一个全连接层 + GELU激活函数 + DropOut组成,采用的是倒瓶颈结构,输入特征层经过一次全连接之后,通道膨胀为原来的4倍,后一个全连接层再恢复成原来的数目。所以经过MLP Block之后tensor的shape是不变的。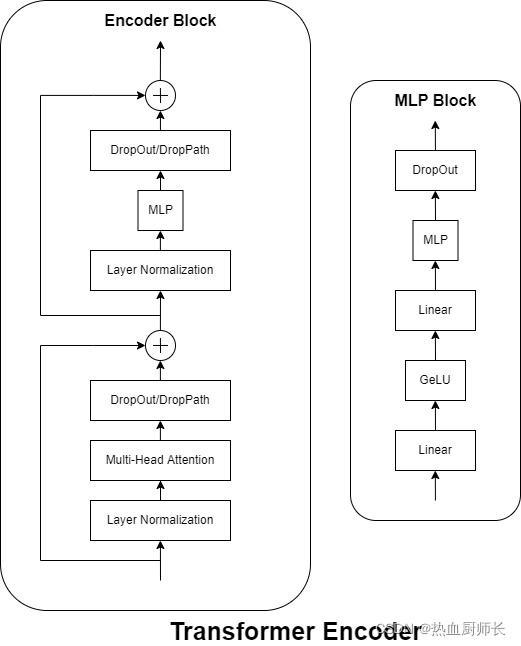
Transformer Encoder代码实现:
class Block(nn.Module):
def __init__(self,
dim,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm):
super(Block, self).__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = MLP(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop_ratio)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
MLP Head详解
经过Transformer Encoder后输出tensor的shape和输出tensor的shape是一样的,以ViT-B/16为例,输入是[197, 768],输出还是[197, 768]。下游任务如果是分类模型,需要提取出对应的class token获取分类结果。Vision Transformer中说MLP是由一个全连层 + Tanh激活 + 全连接层组成。但实际使用起来一层全连接层直接做分类即可。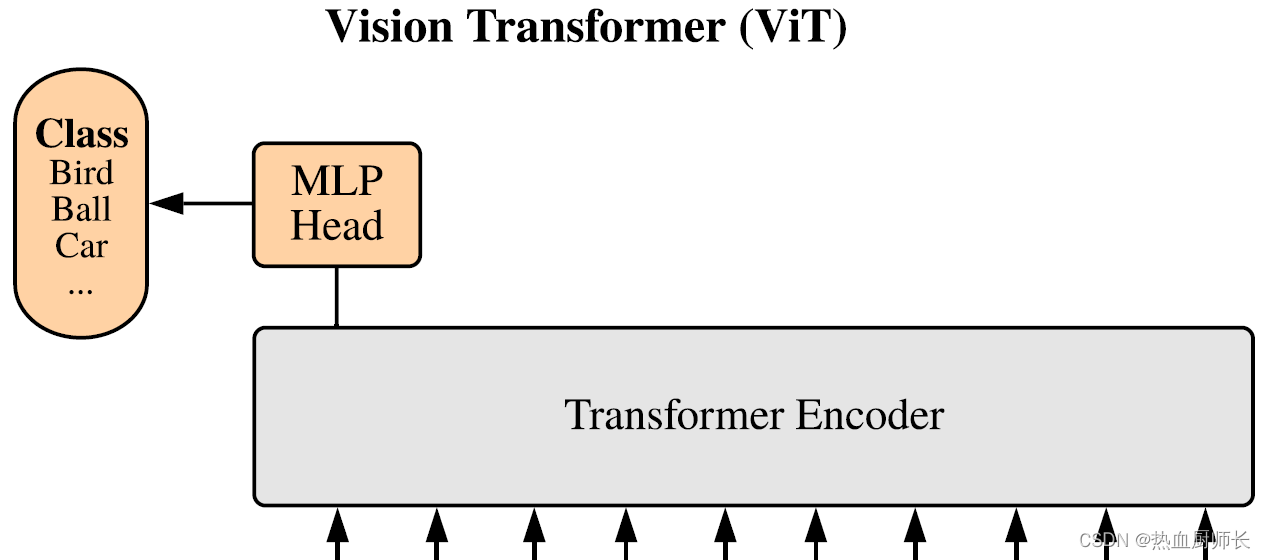
完整模型(ViT-B/16为例)
具体代码如下:
class VisionTransformer(nn.Module):
def __init__(self, image_size=224, patch_size=16, in_c=3, num_classes=1000,
embed_dim=768, depth=12, num_heads=12, mlp_ratio=4.0, qkv_bias=True,
qk_scale=None, representation_size=None, distilled=False, drop_ratio=0.,
attn_drop_ratio=0., drop_path_ratio=0.5, embed_layer=PatchEmbed, norm_layer=None,
act_layer=None):
""" Args: image_size (int, tuple): input image size patch_size (int, tuple): patch size in_c (int): number of input channels num_classes (int): number of classes for classification head embed_dim (int): embedding dimension, dim = patch_size * patch_size * in_c depth (int): depth of transformer num_heads (int): number of attention heads mlp_ratio (int): ratio of mlp hidden dim to embedding dim qkv_bias (bool): enable bias for qkv if True qk_scale (float): override default qk scale of head_dim ** -0.5 if set representation_size (Optional[int]): enable and set representation layer (pre-logits) to this value if set distilled (bool): model includes a distillation token and head as in DeiT models drop_ratio (float): dropout rate attn_drop_ratio (float): attention dropout rate drop_path_ratio (float): stochastic depth rate embed_layer (nn.Module): patch embedding layer norm_layer: (nn.Module): normalization layer """
super(VisionTransformer, self).__init__()
self.num_classes = num_classes
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
self.num_tokens = 2 if distilled else 1
norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6) # partial类似闭包函数,第一个参数是函数对象,后面的参数是第一个函数对象的实参
act_layer = act_layer or nn.GELU
self.patch_embed = embed_layer(image_size=image_size, patch_size=patch_size, in_c=in_c, embed_dim=embed_dim)
num_patches = self.patch_embed.num_patches
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) # nn.Parameter转换函数,把参数转换为可训练变量
self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + self.num_tokens, embed_dim))
self.pos_drop = nn.Dropout(p=drop_ratio)
dpr = [x.item() for x in torch.linspace(0, drop_path_ratio, depth)] # stochastic depth decay rule
self.blocks = nn.Sequential(*[
Block(dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=dpr[i],
norm_layer=norm_layer, act_layer=act_layer)
for i in range(depth)
])
self.norm = norm_layer(embed_dim)
# Representation layer
if representation_size and not distilled:
self.has_logits = True
self.num_features = representation_size
self.pre_logits = nn.Sequential(OrderedDict([
("fc", nn.Linear(embed_dim, representation_size)),
("act", nn.Tanh())
]))
else:
self.has_logits = False
self.pre_logits = nn.Identity() # placeholder
# Classifier head(s)
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
self.head_dist = None
if distilled:
self.head_dist = nn.Linear(self.embed_dim, self.num_classes) if num_classes > 0 else nn.Identity()
# Weight init
nn.init.trunc_normal_(self.pos_embed, std=0.02)
if self.dist_token is not None:
nn.init.trunc_normal_(self.dist_token, std=0.02)
nn.init.trunc_normal_(self.cls_token, std=0.02)
self.apply(_init_vit_weights)
def forward_features(self, x):
# [B, C, H, W] -> [B, num_patches, embed_dim]
x = self.patch_embed(x) # [B, 196, 768]
# [1, 1, 768] -> [B, 1, 768]
cls_token = self.cls_token.expand(x.shape[0], -1, -1)
if self.dist_token is None:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
else:
x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1)
x = self.pos_drop(x + self.pos_embed)
x = self.blocks(x)
x = self.norm(x)
if self.dist_token is None:
return self.pre_logits(x[:, 0])
else:
return x[:, 0], x[:, 1]
def forward(self, x):
x = self.forward_features(x)
if self.head_dist is not None:
x, x_dist = self.head(x[0]), self.head_dist(x[1])
if self.training and not torch.jit.is_scripting():
# during inference, return the average of both classifier predictions
return x, x_dist
else:
return (x + x_dist) / 2
else:
x = self.head(x)
return x
3、总结
至此,Vision Transformer的原理及模型结构以及全部介绍完毕。从实验给出的结果,在当时也达到了SOTA,但是相比于CNN,它需要更多的数据集。在小数据集上训练出来的精度是不如CNN的,但在大数据集上ViT精度更高。一个直观的解释是:ViT因为self-attention独特的机制,更多的利用token与token跨像素之间的信息,而CNN只是对领域的像素进行计算,所以相同参数的情况下,ViT获得的信息更多,在某种程度上可以看成是模型深度更深。所以小数据集上ViT是欠拟合的。实际开发中的做法是:基于大数据集上训练,得到一个预训练权重,然后再在小数据集上Fine-Tune。
后续将会补充Vision Transformer实现的完整代码,先挖个坑。
边栏推荐
猜你喜欢
![虚幻引擎 5 完整指南[2022六月最新课程学习内容]](/img/b3/fe90bca8166108e2e577d5a5e2ea6a.png)
随机推荐
淘宝分布式文件系统存储引擎(一)
Janus转发丢包导致音视频不同步原因分析
基于Webrtc和Janus的多人视频会议系统开发4 - 改造信令交互系统完成sdp交换过程
学好网络安全看这篇文章让你少走弯路
JUC锁框架——CountDownLatch、CyclicBarrier和Semaphore
数据库实体类对应daoimpl,基础的增删改查。
webrtc代码解读一:音频数据的接收解码播放过程
基于Webrtc和Janus的多人视频会议系统开发6 - 从Janus服务器订阅媒体流
vim的介绍
file editor
vs2017 redist 下载地址
【HIT-SC-MEMO7】哈工大2022软件构造 复习笔记7
JVM三大常量池与方法区
counting cycle
注册表设置默认浏览器 win7,winserver 2008,winserver 2012
VS 2017编译 QT no such slot || 找不到*** 问题
益智小游戏- 算算总共多少正方形
sql常用函数
Socket编程详解
Visualization and Animation Technology (3D Visualization)