当前位置:网站首页>Motion capture system for apple picking robot
Motion capture system for apple picking robot
2022-07-01 16:05:00 【MocapLeader】
With the structural adjustment of China's agricultural industrialization and the Internet + The rise of models , Fruit planting plays an important role in generating income for farmers . Compared with the fully automated planting and harvesting of major food crops ( Like wheat 、 corn ), At present, apple 、 Pear and other fruits with thin skin and easy to damage still need to be picked manually , This greatly increases labor costs , And climbing is very dangerous . Therefore, the development of mechanized apple harvesting robot has important practical significance .
The apple harvesting robot mainly consists of a vision system and a manipulator with an end effector , Covers machine vision 、 The image processing 、 Robot kinematics 、 Multi sensor fusion and other technologies . Although domestic and foreign researchers have developed a number of apple harvesting robots , But there are still many problems to be solved , For example, there is a lack of assessment of the degree of pulp damage 、 branch - Fruit stalk - The modeling method of fruit and the mechanism of fruit separation are not well understood .
In order to reduce the damage of apple pulp during picking , Researchers from Northwest University of agriculture and forestry science and technology have carried out research on the optimization of the picking posture of the apple harvesting robot . First, the researchers set up branches 、 Fruit stalk 、 Finite element model of fruit , And compare Abaqus Simulation results and test results are verified , It provides a theoretical basis for the grasp and damage assessment of the end effector and the optimization of the picking action .
The picking action of the mechanical arm directly affects the fruit picking effect , In order to make the picking effect of apple harvesting robot close to that of man , Used by researchers NOKOV Measuring motion capture systems , The upper arm moves when picking apples manually , Then control the manipulator to realize the picking action according to its track path .

Layout around the site 8 individual NOKOV Measure motion capture camera , In testing a person's shoulder joint 、 elbow joint 、 Reflective identification points are pasted on wrist joints and fingertips , utilize NOKOV The measurement motion capture system tracks and records the trajectory data of people picking apples , And select fingertip trajectory data for research and analysis , For trajectory planning of manipulator


reference :
[1] Bolingxin . Research on Key Technologies of apple harvesting robot in structured orchard [D]. Northwest Agricultural and Forestry University of science and technology ,2021.DOI:10.27409/d.cnki.gxbnu.2021.000038.
边栏推荐
- 揭秘慕思“智商税”:狂砸40亿搞营销,发明专利仅7项
- 【Pygame实战】你说神奇不神奇?吃豆人+切水果结合出一款你没玩过的新游戏!(附源码)
- 近半年内连获5家“巨头”投资,这家智能驾驶“黑马”受资本追捧
- u本位合约和币本位合约有区别,u本位合约会爆仓吗
- Use Tencent cloud to build a map bed service
- 电脑照片尺寸如何调整成自己想要的
- ABAP call restful API
- One revolution, two forces, three links: the "carbon reduction" roadmap behind the industrial energy efficiency improvement action plan
- 投稿开奖丨轻量应用服务器征文活动(5月)奖励公布
- 动作捕捉系统用于苹果采摘机器人
猜你喜欢
![[daily news]what happened to the corresponding author of latex](/img/0f/d19b27dc42124c89993dee1bada838.png)
[daily news]what happened to the corresponding author of latex

DO280管理应用部署--pod调度控制

ATSs: automatically select samples to eliminate the difference between anchor based and anchor free object detection methods
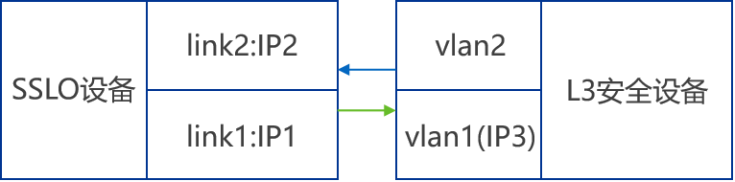
自动、智能、可视!深信服SSLO方案背后的八大设计
ATSS:自动选择样本,消除Anchor based和Anchor free物体检测方法之间的差别
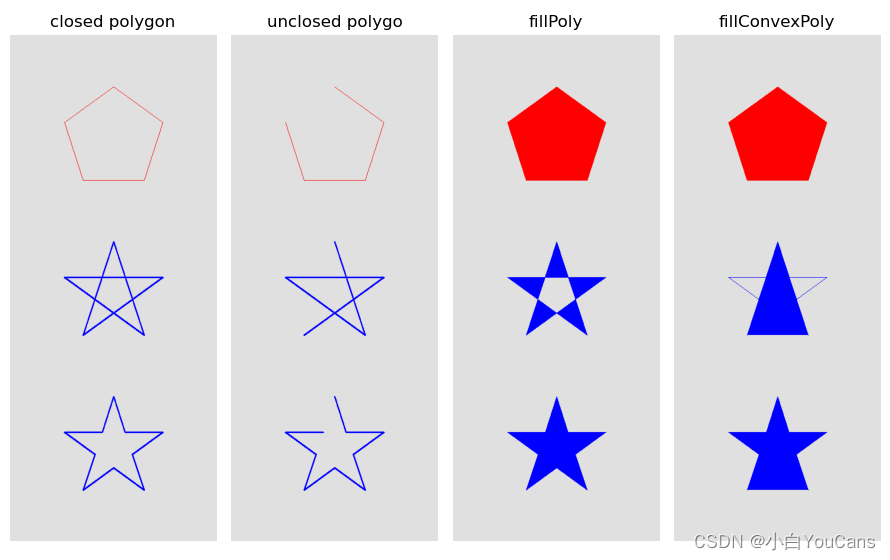
【OpenCV 例程200篇】216. 绘制多段线和多边形

ThinkPHP kernel work order system source code commercial open source version multi user + multi customer service + SMS + email notification

IM即时通讯开发万人群聊消息投递方案
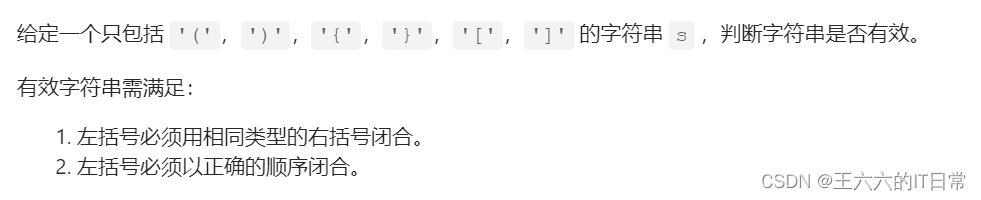
【Hot100】20. 有效的括号

三星率先投产3nm芯片,上海应届硕士生可直接落户,南开成立芯片科学中心,今日更多大新闻在此...
随机推荐
【LeetCode】43. 字符串相乘
Nuxt.js数据预取
[每日一氵]Latex 的通讯作者怎么搞
In the era of super video, what kind of technology will become the base?
ssm框架原理
process.env.NODE_ENV
Comment win11 définit - il les permissions de l'utilisateur? Win11 comment définir les permissions de l'utilisateur
Some abilities can't be learned from work. Look at this article, more than 90% of peers
她就是那个「别人家的HR」|ONES 人物
How to write good code - Defensive Programming Guide
自动、智能、可视!深信服SSLO方案背后的八大设计
Malaysia's Star: Sun Yuchen is still adhering to the dream of digital economy in WTO MC12
In the past six months, it has been invested by five "giants", and this intelligent driving "dark horse" is sought after by capital
2023届春招实习-个人面试过程和面经分享
硬件开发笔记(九): 硬件开发基本流程,制作一个USB转RS232的模块(八):创建asm1117-3.3V封装库并关联原理图元器件
电脑屏幕变色了怎么调回来,电脑屏幕颜色怎么改
There will be a gap bug when the search box and button are zoomed
Detailed explanation of stm32adc analog / digital conversion
Action after deleting laravel's model
【LeetCode】43. String multiplication