当前位置:网站首页>【GAMES101】作业6 加速结构
【GAMES101】作业6 加速结构
2022-08-03 16:48:00 【vv就是vv呀】
【GAMES101】作业6 加速结构
一.作业描述
二.作业解析
1. 递归构造BVH树分析
看视频学习后过了太久,BVH树怎么构造已经忘记了,这里重新根据作业提供的代码整理了一下思路,重新学习了。后面要递归BVH树去判断相交,所以了解一下BVH树的结构也是很必要的。
BVH树节点node属性:
Bound:包围盒;
left,right:左右指针;
object:Object类;
递归实现:
1.递归出口:
当场景中物体总数=1时,包围盒为当前物体的包围盒,左右节点为NULL,返回当前节点;
2.当场景中物体总数=2时,取两个物体的边界并集作为当前节点的包围盒,左右节点分别再进行一次递归;
3.一般递归思路:
取当前所有物体的包围盒并集作为当前节点的总包围盒大小,求出总包围盒大小三维(x,y,z)中长度最大的一个维度dim,并将所有物体的质心坐标在维度dim上的值进行排序,将排序后的前1/2物体和后1/2的物体分别作为左右子集继续进行递归。
归纳一下,BVH树叶节点中存储比较重要的信息就是包围盒bounds。
在遍历BVH树判断相交时,如果发现当前节点的左右指针均为空,就说明当前节点的包围盒大小已经不可再分了。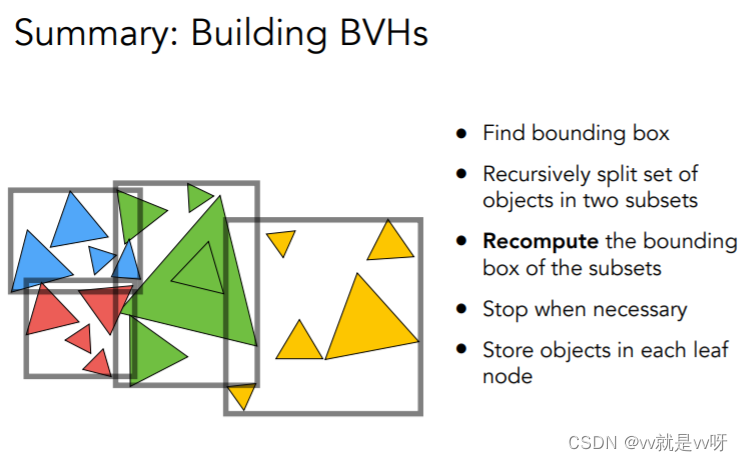
递归构造的代码在这里mark一下。
BVHBuildNode* BVHAccel::recursiveBuild(std::vector<Object*> objects)
{
BVHBuildNode* node = new BVHBuildNode();
// Compute bounds of all primitives in BVH node
Bounds3 bounds;
for (int i = 0; i < objects.size(); ++i)
bounds = Union(bounds, objects[i]->getBounds());
if (objects.size() == 1) {
// Create leaf _BVHBuildNode_
node->bounds = objects[0]->getBounds();
node->object = objects[0];
node->left = nullptr;
node->right = nullptr;
return node;
}
else if (objects.size() == 2) {
node->left = recursiveBuild(std::vector{
objects[0]});
node->right = recursiveBuild(std::vector{
objects[1]});
node->bounds = Union(node->left->bounds, node->right->bounds);
return node;
}
else {
Bounds3 centroidBounds;
for (int i = 0; i < objects.size(); ++i)
centroidBounds =
Union(centroidBounds, objects[i]->getBounds().Centroid());
int dim = centroidBounds.maxExtent();
switch (dim) {
case 0:
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().x <
f2->getBounds().Centroid().x;
});
break;
case 1:
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().y <
f2->getBounds().Centroid().y;
});
break;
case 2:
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {
return f1->getBounds().Centroid().z <
f2->getBounds().Centroid().z;
});
break;
}
auto beginning = objects.begin();
auto middling = objects.begin() + (objects.size() / 2);
auto ending = objects.end();
auto leftshapes = std::vector<Object*>(beginning, middling);
auto rightshapes = std::vector<Object*>(middling, ending);
assert(objects.size() == (leftshapes.size() + rightshapes.size()));
node->left = recursiveBuild(leftshapes);
node->right = recursiveBuild(rightshapes);
node->bounds = Union(node->left->bounds, node->right->bounds);
}
return node;
}
2. Render函数
Render仅有些数据结构上的简单变动。
作业代码实现:
//Render函数:
void Renderer::Render(const Scene& scene)
{
std::vector<Vector3f> framebuffer(scene.width * scene.height);
float scale = tan(deg2rad(scene.fov * 0.5));
float imageAspectRatio = scene.width / (float)scene.height;
Vector3f eye_pos(-1, 5, 10);
int m = 0;
for (uint32_t j = 0; j < scene.height; ++j) {
for (uint32_t i = 0; i < scene.width; ++i) {
// generate primary ray direction
float x = (2 * (i + 0.5) / (float)scene.width - 1) *
imageAspectRatio * scale;
float y = (1 - 2 * (j + 0.5) / (float)scene.height) * scale;
// TODO: Find the x and y positions of the current pixel to get the
// direction
// vector that passes through it.
// Also, don't forget to multiply both of them with the variable
// *scale*, and x (horizontal) variable with the *imageAspectRatio*
// Don't forget to normalize this direction!
Vector3f dir = normalize(Vector3f(x, y, -1));
Ray ray=Ray(eye_pos,dir,0);
framebuffer[m++] = scene.castRay(ray,0);
}
UpdateProgress(j / (float)scene.height);
}
UpdateProgress(1.f);
// save framebuffer to file
FILE* fp = fopen("binary.ppm", "wb");
(void)fprintf(fp, "P6\n%d %d\n255\n", scene.width, scene.height);
for (auto i = 0; i < scene.height * scene.width; ++i) {
static unsigned char color[3];
color[0] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].x));
color[1] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].y));
color[2] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].z));
fwrite(color, 1, 3, fp);
}
fclose(fp);
}
3. Triangle::getItersection函数
求三角形与射线是否相交的getItersection函数的基础判断部分已经实现了,相比作业5返回值出现了一点变化,之前是返回true,这次时返回结构体Intersection类型的inter,return前给各个属性赋上计算出的值即可。
Intersection属性:
happened:是否有交点;
coords:交点坐标;
normal:交点处平面法向量;
obj:相交物体;
m:相交点面材质;
如果判断相交,则修改inter中的属性即可。
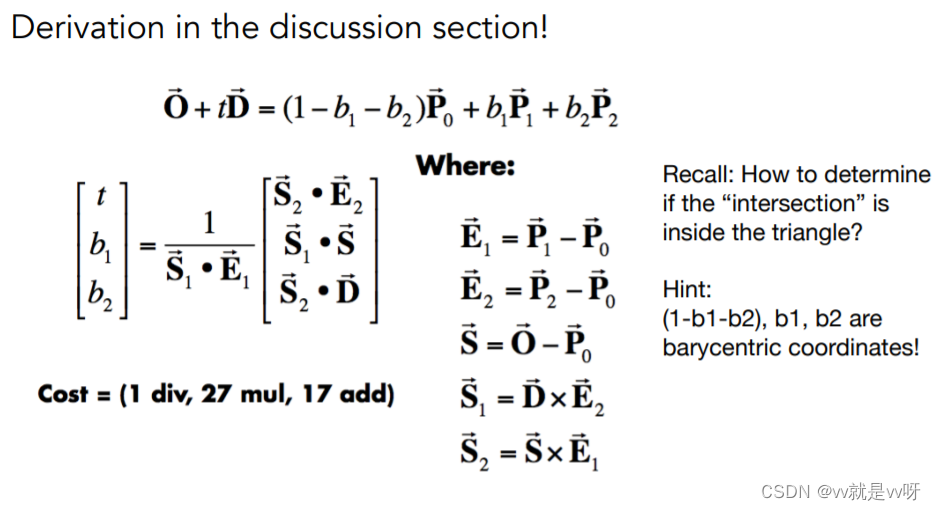
如下公式所示,根据射线ray的定义,t代表的是射线初始点到交点的距离。
计算出t的值以后,可根据origin+t*dir求出相交点坐标。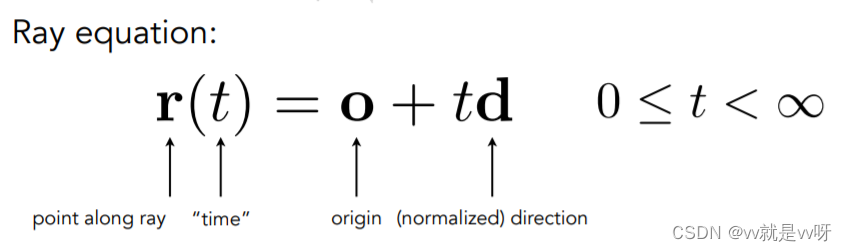
依次为inter中的属性赋值,具体代码如下。
inline Intersection Triangle::getIntersection(Ray ray)
{
Intersection inter;
if (dotProduct(ray.direction, normal) > 0)
return inter;
double u, v, t_tmp = 0;
Vector3f pvec = crossProduct(ray.direction, e2);
double det = dotProduct(e1, pvec);
if (fabs(det) < EPSILON)
return inter;
double det_inv = 1. / det;
Vector3f tvec = ray.origin - v0;
u = dotProduct(tvec, pvec) * det_inv;
if (u < 0 || u > 1)
return inter;
Vector3f qvec = crossProduct(tvec, e1);
v = dotProduct(ray.direction, qvec) * det_inv;
if (v < 0 || u + v > 1)
return inter;
t_tmp = dotProduct(e2, qvec) * det_inv;
// TODO find ray triangle intersection
inter.happened=true;
inter.coords=ray(t_tmp);
inter.normal=normal;
inter.obj=this;
inter.distance=t_tmp;
inter.m=this->m;
return inter;
}
4. 射线与AABB包围盒相交判断
二维判断方法如课程中所讲,最终结果算出近端tnear取从x,y两个维度txmin和tymin中的最大值,tfar取x,y两个维度txmax和tymax中的最小值。
三维判断与二维判断思路一致,只是多了一个维度。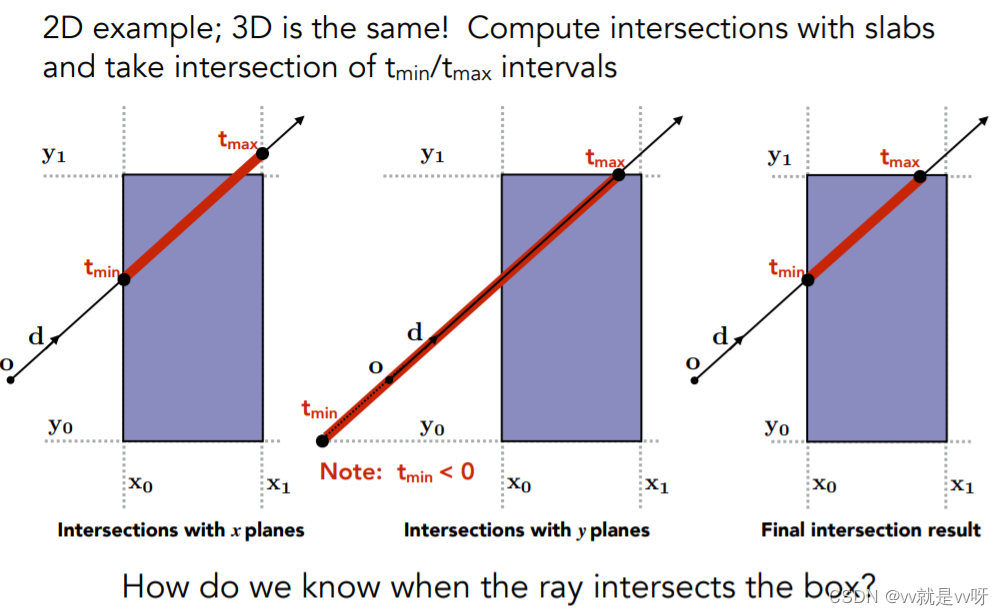
概括一下判断相交思路:
如果texit<0,那么包围盒在射线”后面“,没有相交;
如果tenter<texit且texit>=0,射线与包围盒相交;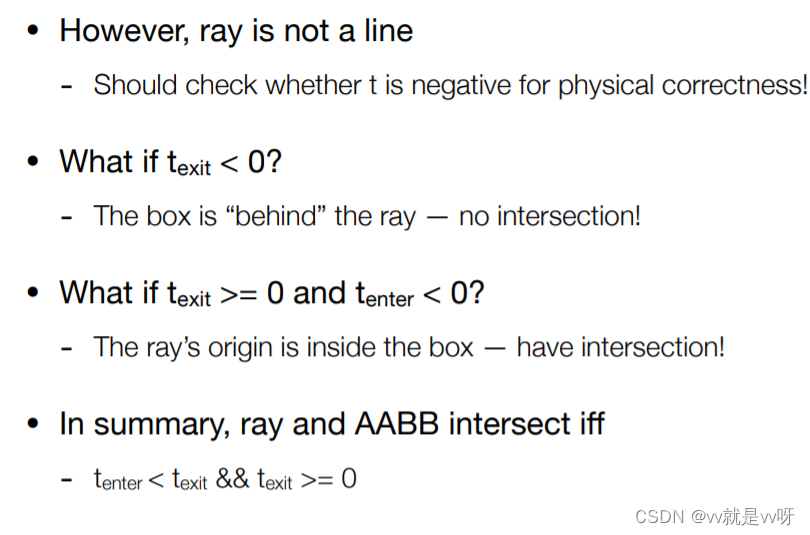
实现代码:
inline bool Bounds3::IntersectP(const Ray& ray, const Vector3f& invDir,
const std::array<int, 3>& dirIsNeg) const
{
// invDir: ray direction(x,y,z), invDir=(1.0/x,1.0/y,1.0/z), use this because Multiply is faster that Division
// dirIsNeg: ray direction(x,y,z), dirIsNeg=[int(x>0),int(y>0),int(z>0)], use this to simplify your logic
// TODO test if ray bound intersects
auto Vmin=(pMin-ray.origin)*invDir;
auto Vmax=(pMax-ray.origin)*invDir;
if(dirIsNeg[0]==1)std::swap(Vmin.x,Vmax.x);
if(dirIsNeg[1]==1)std::swap(Vmin.y,Vmax.y);
if(dirIsNeg[2]==1)std::swap(Vmin.z,Vmax.z);
float tmin=fmax(Vmin.x,fmax(Vmin.y,Vmin.z));
float tmax=fmin(Vmax.x,fmin(Vmax.y,Vmax.z));
if(tmin<tmax&&tmax>=0)return true;
else return false;
}
5. BVH::getItersection函数
加速后的求交的判断步骤为:
深度优先遍历BVH树,判断射线是否与当前节点的轴对称包围盒AABB相交,如果不相交,则直接结束;如果相交,判断当前节点的包围盒是否可以继续划分(即当前节点是否有左右子节点),若可以继续划分,返回左右求交获得的intersection中最近的intersection。
代码如下:
Intersection BVHAccel::getIntersection(BVHBuildNode* node, const Ray& ray) const
{
// TODO Traverse the BVH to find intersection
Intersection inter,interL,interR;
std::array<int, 3> dirIsNeg;
if(ray.direction.x<0)dirIsNeg[0]=1;
if(ray.direction.y<0)dirIsNeg[1]=1;
if(ray.direction.z<0)dirIsNeg[2]=1;
bool flag=node->bounds.IntersectP(ray,ray.direction_inv,dirIsNeg);
if(!flag)return inter;
if(node->left==nullptr&&node->right==nullptr){
return inter=node->object->getIntersection(ray);
}
interL=getIntersection(node->left,ray);
interR=getIntersection(node->right,ray);
return interL.distance<interR.distance?interL:interR;
}
6. SAH优化思路
BVH存在着包围盒重叠的问题,然而划分时要尽可能减少划分后两部分包围盒重叠的体积,因为重叠的体积越大,射线穿过重叠区域的可能性越大,遍历两个子树的可能性就越高,计算消耗越多。
此外,如果空间中物体分布得很不均匀,比如右边存在大量物体,而左边只有少量物体,此时使用BVH就会得到很差的划分结果。
SAH(Surface Area Heuristic)基于表面积对划分进行评估,这种方法通过对求交代价和遍历代价进行评估,给出了每一种划分的代价(Cost),而我们的目的便是去寻找代价最小的划分。
内容参考:PBRT-E4.3-层次包围体(BVH)
↓↓↓↓↓↓↓↓↓↓
c(A,B)为当前划分的代价;
p(A),p(B)为射线落在划分的两个子包围盒的概率;
t(i),t(j)为对每个物体求交的代价,t_trav为遍历代价。
SAH考虑了物体在空间中的分布,也考虑到了划分后两部分包围盒重叠的体积问题,优化了性能。
这里就不放具体的代码了,我尝试了:
B站 SAH和知乎 SAH
这两种方法大差不差,处理细节上有些不同,但是我的虚拟机处处透露着离谱的气息,单BVH的render都用了15s,别人描述的都是6s,SAH优化以后时间还多了1s(实属反向优化了),后面越来越慢…就当是先对SAH做了个简单的了解吧。
实现效果: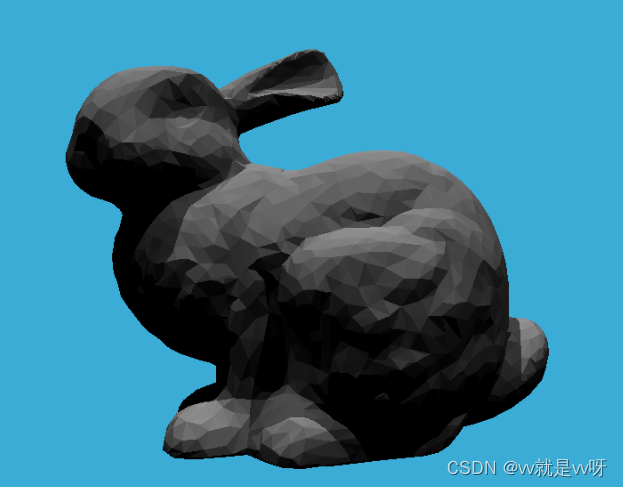

边栏推荐
猜你喜欢
随机推荐
303. Range Sum Query - Immutable
关于oracle表空间在线碎片整理
C专家编程 第1章 C:穿越时空的迷雾 1.7 编译限制
Selective Search学习笔记
20. Valid Parentheses
FinClip | July 2022 Product Highlights
protobuf 中数据编码规则
产品-Axure9英文版,轮播图效果
视频人脸识别和图片人脸识别的关系
使用Stream多年,collect还有这些“骚操作”?
204. Count Primes
TypeScript文件的编译执行
Async的线程池使用的哪个?
Description of the functional scenario of "collective storage and general governance" in the data center
滑环安装注意事项
面试不再被吊打!这才是Redis分布式锁的七种方案的正确打开方式
FinClip | 2022 年 7 月产品大事记
设置海思芯片MMZ内存、OS内存详解
uniapp隐藏导航栏和横屏显示设置
yolov5s用自己的数据集进行训练模型