当前位置:网站首页>Gd32f3x0 official PWM drive has a small positive bandwidth (inaccurate timing)
Gd32f3x0 official PWM drive has a small positive bandwidth (inaccurate timing)
2022-06-26 05:11:00 【lljss2020】
1. Code
#include "gd32f3x0.h"
#include <stdio.h>
#include "gd32f350r_eval.h"
void gpio_config(void);
void timer_config(void);
/*! \brief configure the GPIO ports \param[in] none \param[out] none \retval none */
void gpio_config(void)
{
/*Configure PB3 PB10 PB11(TIMER1 CH1 CH2 CH3) as alternate function*/
gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_3);
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_3);
gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_10);
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_10);
gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_11);
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_11);
gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_3);
gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_10);
gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_11);
}
/*! \brief configure the TIMER peripheral \param[in] none \param[out] none \retval none */
void timer_config(void)
{
/* ----------------------------------------------------------------------- TIMER1 configuration: generate 3 PWM signals with 3 different duty cycles: TIMER1CLK is 1MHz TIMER1 channel1 duty cycle = (4000/ 16000)* 100 = 25% TIMER1 channel2 duty cycle = (8000/ 16000)* 100 = 50% TIMER1 channel3 duty cycle = (12000/ 16000)* 100 = 75% ----------------------------------------------------------------------- */
timer_oc_parameter_struct timer_ocintpara;
timer_parameter_struct timer_initpara;
rcu_periph_clock_enable(RCU_TIMER1);
timer_deinit(TIMER1);
/* TIMER1 configuration */
#ifdef GD32F330
timer_initpara.prescaler = 83;
#endif /* GD32F330 */
#ifdef GD32F350
timer_initpara.prescaler = 107;
#endif /* GD32F350 */
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 15999;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER1,&timer_initpara);
/* CH1,CH2 and CH3 configuration in PWM mode */
timer_ocintpara.outputstate = TIMER_CCX_ENABLE;
timer_ocintpara.outputnstate = TIMER_CCXN_DISABLE;
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;
timer_ocintpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;
timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW;
timer_ocintpara.ocnidlestate = TIMER_OCN_IDLE_STATE_LOW;
timer_channel_output_config(TIMER1,TIMER_CH_1,&timer_ocintpara);
timer_channel_output_config(TIMER1,TIMER_CH_2,&timer_ocintpara);
timer_channel_output_config(TIMER1,TIMER_CH_3,&timer_ocintpara);
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,3999);
timer_channel_output_mode_config(TIMER1,TIMER_CH_1,TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER1,TIMER_CH_1,TIMER_OC_SHADOW_DISABLE);
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_2,7999);
timer_channel_output_mode_config(TIMER1,TIMER_CH_2,TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER1,TIMER_CH_2,TIMER_OC_SHADOW_DISABLE);
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_3,11999);
timer_channel_output_mode_config(TIMER1,TIMER_CH_3,TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER1,TIMER_CH_3,TIMER_OC_SHADOW_DISABLE);
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(TIMER1);
/* auto-reload preload enable */
timer_enable(TIMER1);
}
/*! \brief main function \param[in] none \param[out] none \retval none */
int main(void)
{
rcu_periph_clock_enable(RCU_GPIOB);
gpio_config();
timer_config();
while (1);
}
2. analysis
PWM frequency =84MHz/(83+1)/(15999+1)= 62.5Hz
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,3999);
Calculate it like this TIMER1 channel1 duty cycle = (3999/ 16000)* 100 = 24.99375%.
So the correct answer is
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,4000);
TIMER1 channel1 duty cycle = (4000/ 16000)* 100 = 25%
stay PWM It is not easy to find this problem when the frequency is very low , stay 10~100kHz when , The problem that the positive bandwidth is too small can be obviously found by oscilloscope .
边栏推荐
- 【Unity3D】刚体组件Rigidbody
- 关于支付接口回调地址参数字段是“notify_url”,签名过后的特殊字符url编码以后再解码后出现错误(¬ , ¢, ¤, £)
- [geek] product manager training camp
- 程序人生
- 广和通联合安提国际为基于英伟达 Jetson Xavier NX的AI边缘计算平台带来5G R16强大性能
- What is UWB in ultra-high precision positioning system
- Technical past: tcp/ip protocol that has changed the world (precious pictures, caution for mobile phones)
- 6.1 - 6.2 公鑰密碼學簡介
- Codeforces Round #800 (Div. 2)
- [unity3d] rigid body component
猜你喜欢

Experience of reading the road to wealth and freedom

PowerShell runtime system IO exceptions

A company crawling out of its grave

cartographer_fast_correlative_scan_matcher_2d分支定界粗匹配

Beidou navigation technology and industrial application of "chasing dreams in space and feeling for Beidou"

超高精度定位系统中的UWB是什么

YOLOV5超参数设置与数据增强解析
ModuleNotFoundError: No module named ‘numpy‘
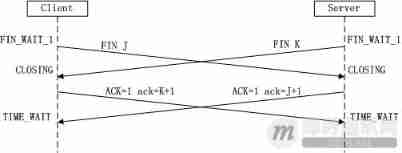
Classic theory: detailed explanation of three handshakes and four waves of TCP protocol

LeetCode 19. Delete the penultimate node of the linked list
随机推荐
[ide (imagebed)]picgo+typora+aliyunoss deployment blog Gallery (2022.6)
How to rewrite a pseudo static URL created by zenpart
PHP之一句话木马
86.(cesium篇)cesium叠加面接收阴影效果(gltf模型)
app 应用安装到手机,不显示图标,引发的思考
Codeforces Round #800 (Div. 2)
Dbeaver installation and configuration of offline driver
[IDE(ImageBed)]Picgo+Typora+aliyunOSS部署博客图床(2022.6)
PHP二维/多维数组按照指定的键值来进行升序和降序
6.1 - 6.2 公钥密码学简介
ThreadPoolExecutor实现文件上传批量插入数据
Guanghetong and anti international bring 5g R16 powerful performance to the AI edge computing platform based on NVIDIA Jetson Xavier nx
Happy New Year!
天才制造者:獨行俠、科技巨頭和AI|深度學習崛起十年
Mise en œuvre du routage dynamique par zuul
Datetime data type - min() get the earliest date and date_ Range() creates a date range, timestamp() creates a timestamp, and tz() changes the time zone
Créateur de génie: cavalier solitaire, magnat de la technologie et ai | dix ans d'apprentissage profond
线程优先级
zencart新建的URL怎么重写伪静态
Illustration of ONEFLOW's learning rate adjustment strategy