当前位置:网站首页>ECCV2022 Workshop | 复杂环境中的多目标跟踪和分割
ECCV2022 Workshop | 复杂环境中的多目标跟踪和分割
2022-08-01 00:23:00 【3D视觉工坊】
点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

来源丨CVer
本文主要介绍我们将在ECCV2022举办的workshop:复杂环境中的多目标跟踪和分割
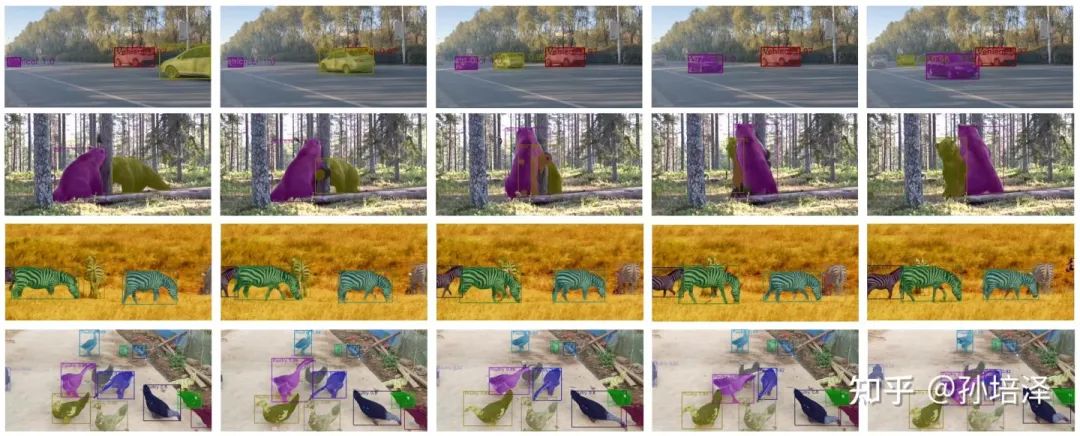
多目标跟踪和分割任务是在视频中定位和关联感兴趣的目标,是城市监控、公共安全、视频内容理解和人机交互等许多实际应用中的基础技术。现有的计算机视觉系统在简单场景中取得了很好的跟踪和分割性能,例如 MOT 数据集和 DAVIS 数据集,但是在复杂环境中表现一般,远不如人类视觉系统的性能。
为了促进当前计算机视觉系统在复杂环境中的性能,我们的workshop探讨了多目标跟踪和分割的四种挑战性的场景:(1) 长视频 (2) 遮挡对象 (3) 复杂运动 (4) 开放世界,同时举办了四个对应的比赛:
- 第四届 YouTubeVIS 长视频实例分割挑战赛 (4th YouTubeVIS and Long Video Instance Segmentation Challenge)
- 第二届 OVIS 遮挡视频实例分割挑战赛 (2nd Occluded Video Instance Segmentation Challenge)
- 第一届 DanceTrack 团体舞蹈多人追踪挑战赛 (1st Multiple People Tracking in Group Dance Challenge)
- 第二届 UVO 开放世界视频目标检测和分割挑战赛 (2nd Open-World Video Object Detection and Segmentation Challenge)
欢迎大家关注和参加比赛 !
主页:Multiple Object Tracking and Segmentation in Complex Environments
https://motcomplex.github.io/
比赛时间:2022年7月1日-10月1日
workshop时间:2022年10月23/24日 (在线workshop)
我们将在比赛截止后公布各个挑战赛的最终排名,并在workshop时颁发奖项,邀请排名前列的团队分享解决方案。同时,我们已邀请多目标跟踪领域的多位重量级嘉宾在workshop时分享talk,敬请期待!
1. 第四届 YouTubeVIS 长视频实例分割挑战赛
视频实例分割 (Video Instance Segmentation, VIS) 是将实例分割任务从图像扩展到视频。这一任务不仅需要模型输出视频每一帧的实例分割结果,并且需要将同一实例在不同帧之间关联起来。这次比赛我们在前几届数据集的基础上扩展了长视频进行验证和测试,以鼓励参赛团队更加关注模型的关联性能而不仅是单帧的实例分割性能。

数据集下载:https://
https://codalab.lisn.upsaclay.fr/competitions/5902#participate
比赛服务器:
https://codalab.lisn.upsaclay.fr/competitions/5902
2. 第二届 OVIS 遮挡视频实例分割挑战赛
遮挡视频实例分割 (Occluded Video Instance Segmentation, OVIS) 是视频实例分割中极具难度的场景,也是视频任务受关注的原因之一,因为在视频中解决遮挡是比在单帧图像中更加定义良好的问题。同时,相比普通场景的视频实例分割,遮挡物体的消失后再重现对追踪模型的长程关联能力提出了更高的要求。
数据集下载:
https://codalab.lisn.upsaclay.fr/competitions/5857#participate-get-data
比赛服务器:
https://codalab.lisn.upsaclay.fr/competitions/5857
3. 第一届 DanceTrack 团体舞蹈多人追踪挑战赛
团体舞蹈 (DanceTrack) 是多目标追踪中具有明显特色的场景。在团体舞蹈中,舞者着装一致,外观高度相似,同时,舞者运动模式复杂,相对位置频繁交换。这些特点对现在广为流行的基于外观(re-ID)和线性运动模型(Kalman Filter)的追踪模型提出挑战。

数据集下载:
https://https://github.com/DanceTrack/DanceTrack
比赛服务器:
https://codalab.lisn.upsaclay.fr/competitions/5832
4. 第二届 UVO 开放世界视频目标检测和分割挑战赛
开放世界视频目标(Unidentified Video Objects, UVO)任务是指检测和分割出现在图像或视频中的所有对象,无论其语义概念是已知的还是未知的。开放世界感知能力是人类区别于现有计算机视觉模型的重要能力。这次比赛我们在前一届数据集的基础上扩展了数据规模,以期待进一步推进模型的开放世界感知能力。

数据集下载:
https://sites.google.com/view/unidentified-video-object/dataset?authuser=0
比赛服务器:https://
https://sites.google.com/view/unidentified-video-object/dataset?authuser=0
由于时间精力和组织能力的限制,我们这次workshop没有向ECCV组委会申请接受投稿,非常遗憾。我们真诚地邀请有投稿意向的团队联系我们在workshop中直接进行talk分享。我们会后计划与所有talk嘉宾,参赛获奖队伍,组织者合作一篇technical report,欢迎届时关注。
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
边栏推荐
- Qlib quantitative source analysis: qlib/qlib/contrib/model/GBDT py
- Matlab/Arcgis processing nc data
- [MATLAB project combat] LDPC-BP channel coding
- MYSQL事务
- 浏览器下载快捷方式到桌面(PWA)
- 一文带你了解 Grafana 最新开源项目 Mimir 的前世今生
- Kyoto University:Masaki Waga | 黑箱环境中强化学习的动态屏蔽
- 对象缓存服务的思考和实现
- TFC CTF 2022 WEB Diamand WriteUp
- lua入门案例实战123DIY
猜你喜欢
消息队列消息存储设计(架构实战营 模块八作业)
面试突击69:TCP 可靠吗?为什么?
vector的基本实现
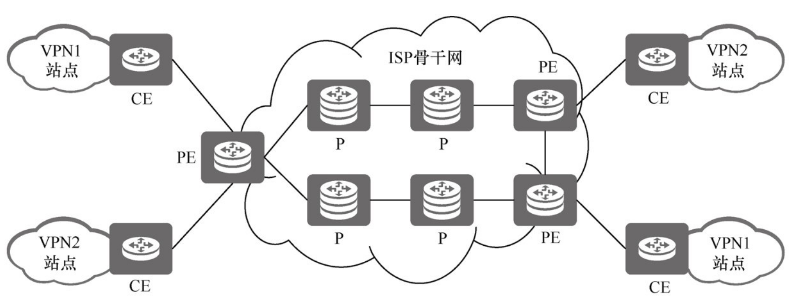
一文概述:VPN的基本模型及业务类型
Mysql environment installation under Linux (centos)
![[Cloud Residency Co-Creation] [HCSD Big Celebrity Live Broadcast] Personally teach the secrets of interviews in big factories](/img/7a/278ffada1cc660e7f5c2d7c66fa38e.png)
[Cloud Residency Co-Creation] [HCSD Big Celebrity Live Broadcast] Personally teach the secrets of interviews in big factories

SVN服务器搭建+SVN客户端+TeamCity集成环境搭建+VS2019开发
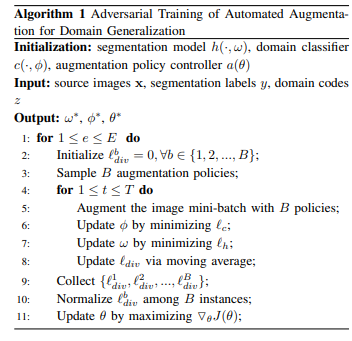
Southern University of Science and Technology: Xiaoying Tang | AADG: Automatic Enhancement for Generalization in the Field of Retinal Image Segmentation
谷歌『云开发者速查表』;清华3D人体数据集;商汤『通用视觉框架』公开课;Web3极简入门指南;高效深度学习免费书;前沿论文 | ShowMeAI资讯日报

Flink 1.13(八)CDC

随机推荐
Flutter教程之 01配置环境并运行demo程序 (教程含源码)
欧拉系统(euleros):升级Mysql
qlib量化源码分析:qlib/qlib/contrib/model/gbdt.py
MYSQL-批量插入数据
Flutter教程之四年开发经验的高手给的建议
2022年最新重庆建筑八大员(电气施工员)模拟题库及答案
Matlab/Arcgis processing nc data
cobaltstrike
游戏安全03:缓冲区溢出攻击简单解释
WindowInsetsControllerCompat简单使用
Carefully summarize thirteen suggestions to help you create more suitable MySQL indexes
LeetCode--The problem of robbery
一体化步进电机在无人机自动机场的应用
基于simulink的Passive anti-islanding-UVP/OVP and UFP/OFP被动反孤岛模型仿真
Web3.0:构建 NFT 市场(一)
清华大学陈建宇教授团队 | 基于接触丰富机器人操作的接触安全强化学习框架
IPD流程专业术语
Classes and Objects: Above
Kyoto University: Masaki Waga | Dynamic Masking for Reinforcement Learning in Black Box Environments
Interview Question: Implementing Deadlocks