当前位置:网站首页>基于turtlebot3实现SLAM建图及自主导航仿真
基于turtlebot3实现SLAM建图及自主导航仿真
2022-07-03 10:31:00 【3D视觉工坊】
来源丨古月居
turtlebot3简介
TurtleBot3是一个小型,低成本,完全可编程,基于ROS的移动机器人。它旨在用于教育,研究,产品原型和爱好应用的目的。
TurtleBot3的目标是大幅降低平台的尺寸和价格,而不会牺牲性能,功能和质量。由于提供了不同可选,如底盘,计算机和传感器,TurtleBot3可以通过各种方式进行定制。
安装turtlebot3
sudo apt-get install ros-melodic-turtlebot3-*
//安装gmapping建图算法依赖
apt-get install ros-melodic-gmapping
//安装dwa局部路径规划算法
apt-get install ros-melodic-dwa-local-plannerROS版本不同对应修改melodic
键盘控制小车运动
首先在gazebo仿真环境中启动turtlebot3小车
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch安装键盘控制相关依赖
sudo apt-get install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-teleop-twist-keyboard运行键盘控制节点,根据输出提示控制小车
rosrun teleop_twist_keyboard teleop_twist_keyboard.py若安装出现[Err] [REST.cc:205] Error in REST request则需要进行如下配置:
sudo gedit ~/.ignition/fuel/config.yaml
将文件中https://api.ignitionfuel.org修改为https://api.ignitionrobotics.org如果启动gazebo出现一直打不开的情况,原因是.gazebo下加载models库不正确导致,解决方法是直接下载所有模型到用户的根目录下的.gazebo/models/下

cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvfSLAM构建地图
把上面的命令都关了,重新启动以下的命令
1、开启仿真环境
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_house.launch
2、开启SLAM功能,建图算法选择gmapping
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping3、启动键盘控制节点,控制小车在环境内转一圈,尽可能扫出完整封闭的地图
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch4、保存地图
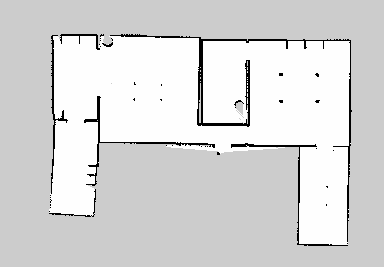
rosrun map_server map_saver -f ~/map这是我跑了一圈小车扫出的地图
自主导航
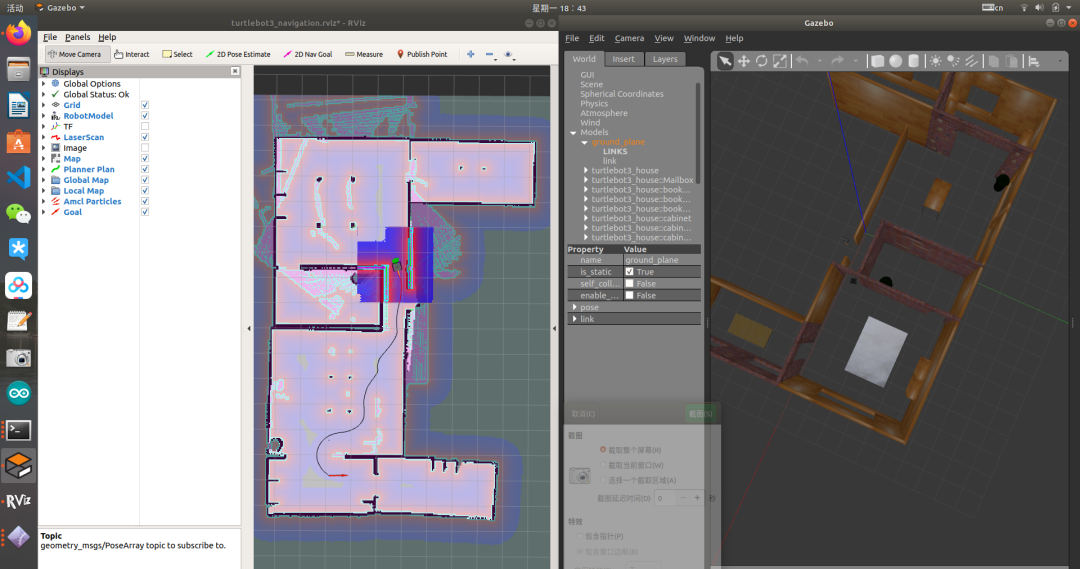
实现的效果图:
1、先加载保存好的地图
rosrun map_server map_server map.yaml2、打开仿真环境,用可视化工具rviz显示出来
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_house.launch3、打开自主导航功能
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/kaijun/map.yaml配置好rviz,使用2D Pose Estimate设定好小车起始地点,再使用2D Nav Goal设定小车目标地点,小车会规划好路径,自动运行到目标位置,实现自主导航功能。

本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
边栏推荐
- 搭建ADG后,实例2无法启动 ORA-29760: instance_number parameter not specified
- Oracle withdraw permission & create role
- How to become a senior digital IC Design Engineer (1-3) Verilog coding syntax: Verilog behavior level, register transfer level, gate level (abstract level)
- Numpy np.max和np.maximum实现relu函数
- Processes and threads
- 1. Hal driven development
- Arctangent entropy: the latest SCI paper in July 2022
- Intel 13th generation core flagship exposure, single core 5.5ghz
- C language two-dimensional array
- .\vmware-vdiskmanager.exe -k “c:\\xxxxx.vmdk”
猜你喜欢

Numpy np. Max and np Maximum implements the relu function
2022 东北四省赛 VP记录/补题
FL Studio 20 unlimited trial fruit arranger Download

ASP.NET-酒店管理系统
AIDL

机器学习 3.2 决策树模型 学习笔记(待补)
A simple method of adding dividing lines in recyclerview
行业唯一!法大大电子合同上榜36氪硬核科技企业

Analysis of EPS electric steering system
Solve undefined reference to`__ aeabi_ Uidivmod 'and undefined reference to`__ aeabi_ Uidiv 'error
随机推荐
Stm32hal library upgrades firmware based on flash analog U disk (detailed explanation)
Cadence background color setting
大厂技术专家:工程师如何提升沟通能力?
One hot code
Bi skills - permission axis
机器学习 3.2 决策树模型 学习笔记(待补)
今晚要修稿子準備發佈。但是,仍卡在這裡,也許你需要的是一個段子。
Encapsulate a koa distributed locking middleware to solve the problem of idempotent or repeated requests
BI技巧丨权限轴
Event preview | the live broadcast industry "rolled in" to drive new data growth points with product power
phpcms 提示信息页面跳转showmessage
Unique in the industry! Fada electronic contract is on the list of 36 krypton hard core technology enterprises
动态规划(区间dp)
After using the thread pool for so long, do you really know how to reasonably configure the number of threads?
MATLAB提取不規則txt文件中的數值數據(簡單且實用)
Empire CMS no thumbnail smart tag (e:loop) two ways to judge whether there is a titlepic
如何成为一名高级数字 IC 设计工程师(1-2)Verilog 编码语法篇:Verilog 1995、2001、2005 标准
AOSP ~ NTP ( 网络时间协议 )
Spl06-007 air pressure sensor (example of barometer)
C language AES encryption and decryption