当前位置:网站首页>Qt+VTK+OCCT读取IGES/STEP模型
Qt+VTK+OCCT读取IGES/STEP模型
2022-07-03 10:23:00 【windSnowLi】
参考链接
主要代码
#include "VTKOCCT.h"
#include <BRepPrimAPI_MakeBox.hxx>
#include <BRepPrimAPI_MakeCone.hxx>
#include <IVtkTools_ShapeDataSource.hxx>
#include <BRepBuilderAPI_Transform.hxx>
#include <vtkAutoInit.h>
#include <vtkRenderer.h>
#include <vtkRenderWindow.h>
#include <vtkInteractorStyleTrackballCamera.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkPolyDataMapper.h>
#include <IGESControl_Reader.hxx>
#include <STEPCAFControl_Reader.hxx>
//Lesson 17
#include <Bnd_Box.hxx>
#include <BRepBndLib.hxx>
#include <BRepBuilderAPI_MakeVertex.hxx>
#include <vtkCubeSource.h>
#include <vtkEllipseArcSource.h>
#include <vtkSphereSource.h>
#include <vtkConeSource.h>
#include <vtkAppendPolyData.h >
#include <vtkCleanPolyData.h >
#include <vtkNew.h>
#include <vtkPoints.h>
#include <vtkCellArray.h>
#include <vtkBoundingBox.h>
#include <vtkAxesActor.h>
decltype(auto) ReadIges(const char* file) {
IGESControl_Reader reader;
reader.ReadFile(file);
reader.TransferRoots();
TopoDS_Shape shape = reader.OneShape();
vtkNew<vtkPolyData> polydata;
vtkNew<vtkPolyDataMapper> mapper;
vtkNew<vtkActor> actor;
vtkNew<IVtkTools_ShapeDataSource> shapeSource;
shapeSource->SetShape(new IVtkOCC_Shape(shape));
shapeSource->Update();
mapper->SetInputConnection(shapeSource->GetOutputPort());
actor->SetMapper(mapper);
return actor;
}
decltype(auto) ReadStep(const char* file) {
STEPControl_Reader readerSTEP;
IFSelect_ReturnStatus statSTEP = readerSTEP.ReadFile(file);
IFSelect_PrintCount modeSTEP = IFSelect_ListByItem;
readerSTEP.PrintCheckLoad(Standard_False, modeSTEP);
readerSTEP.TransferRoots();
TopoDS_Shape shape = readerSTEP.OneShape();
vtkNew<vtkPolyDataMapper> mapper;
vtkNew<vtkActor> actor;
vtkNew<IVtkTools_ShapeDataSource> shapeSource;
shapeSource->SetShape(new IVtkOCC_Shape(shape));
shapeSource->Update();
mapper->SetInputConnection(shapeSource->GetOutputPort());
actor->SetMapper(mapper);
return actor;
}
decltype(auto) TopoDSShapeSphere() {
//TopoDS_ShapeSphere
gp_Ax2 sphere_origin(gp_Pnt(0, 0, 0), gp_Dir(0, 0, 1));
BRepPrimAPI_MakeCone mkCone(sphere_origin, 1.0, 0.01, 1);
const TopoDS_Shape& TopoDS_ShapemkConeTMP = mkCone.Shape();
TopoDS_Shape TopoDS_ShapeCONE = static_cast<TopoDS_Shape>(TopoDS_ShapemkConeTMP);
gp_Trsf TSPHERE;
TSPHERE.SetScaleFactor(0.9);
TSPHERE.SetTranslationPart(gp_Vec(0, 0, 0));
BRepBuilderAPI_Transform stepBRepTransformationTOPBOX(TopoDS_ShapeCONE, TSPHERE, Standard_True);
TopoDS_ShapeCONE = stepBRepTransformationTOPBOX.Shape();
vtkNew<IVtkTools_ShapeDataSource> TOPOCONESource;
TOPOCONESource->SetShape(new IVtkOCC_Shape(TopoDS_ShapeCONE));
vtkNew<vtkActor> actorTOPOCONE;
vtkNew<vtkPolyDataMapper> mapperTOPOCONE;
actorTOPOCONE->SetMapper(mapperTOPOCONE);
mapperTOPOCONE->SetInputConnection(TOPOCONESource->GetOutputPort());
return actorTOPOCONE;
}
decltype(auto) VTKpointOnMeshes(const char* file) {
STEPControl_Reader readerSTEP;
IFSelect_ReturnStatus statSTEP = readerSTEP.ReadFile(file);
IFSelect_PrintCount modeSTEP = IFSelect_ListByItem;
readerSTEP.PrintCheckLoad(Standard_False, modeSTEP);
readerSTEP.TransferRoots();
TopoDS_Shape TopoDS_ShapeSTEP = readerSTEP.OneShape();
//VTKpointOnMeshes
vtkNew<vtkPoints> VTKpointsOnMeshes;
vtkNew<vtkCellArray> verticesForVTKpointsOnMeshes;
vtkIdType pid[1];
//vtkPolyData creation
vtkNew<vtkPolyData> PolyDataVTKPointsOnMeshes;
//vtkPolyData initialization
PolyDataVTKPointsOnMeshes->SetPoints(VTKpointsOnMeshes);
PolyDataVTKPointsOnMeshes->SetVerts(verticesForVTKpointsOnMeshes);
//VTKpoint IGES, STEP TopoDS_ShapeBOX CALC
Bnd_Box aabb;
//AABB ALGO Per TopoDS_Shape mesh , Please choose the source you like to run and put it in next line
BRepBndLib::Add(TopoDS_ShapeSTEP, aabb, true); //TopoDS_ShapeIGES //TopoDS_ShapeSTEP //TopoDS_ShapeCONE
//VTKpointIGES CALC per TopoDS_Shape mesh
int density = 20;
gp_XYZ Pmin = aabb.CornerMin().XYZ();
gp_XYZ Pmax = aabb.CornerMax().XYZ();
gp_XYZ D = Pmax - Pmin;
double dim[3] = {
D.X(),D.Y(),D.Z() };
double mind = Min(dim[0], Min(dim[1], dim[2]));
const double d = mind / density;
int nslice[3] = {
int(Round(dim[0] / d)) + 1 ,
int(Round(dim[1] / d)) + 1 ,
int(Round(dim[2] / d)) + 1 };
for (int i = 0; i < nslice[0]; ++i)
for (int j = 0; j < nslice[1]; ++j)
for (int k = 0; k < nslice[2]; ++k)
{
gp_XYZ p = Pmin
+ gp_XYZ(d * i, 0, 0)
+ gp_XYZ(0, d * j, 0)
+ gp_XYZ(0, 0, d * k);
pid[0] = VTKpointsOnMeshes->InsertNextPoint(p.X(), p.Y(), p.Z());
verticesForVTKpointsOnMeshes->InsertNextCell(1, pid);
};
//Append the meshes
vtkNew<vtkAppendPolyData> appendFilter;
appendFilter->AddInputData(PolyDataVTKPointsOnMeshes);
//Remove any duplicate points.
vtkNew<vtkCleanPolyData> cleanFilterForMapperVTKShapes;
cleanFilterForMapperVTKShapes->SetInputConnection(appendFilter->GetOutputPort());
cleanFilterForMapperVTKShapes->Update();
vtkNew<vtkPolyDataMapper> mapperVTKShapes;
mapperVTKShapes->SetInputConnection(cleanFilterForMapperVTKShapes->GetOutputPort());
vtkNew<vtkActor> actorVTKShapes;
actorVTKShapes->SetMapper(mapperVTKShapes);
return actorVTKShapes;
}
VTKOCCT::VTKOCCT(QWidget* parent)
: QMainWindow(parent)
{
vtkWidget = new QVTKOpenGLNativeWidget(this);
this->resize(600, 400);
this->setCentralWidget(vtkWidget);
// ViewPort分割
double xmins[4] = {
0, 0.5, 0 ,0.5 };
double xmaxs[4] = {
0.5, 1, 0.5,1 };
double ymins[4] = {
0, 0, 0.5,0.5 };
double ymaxs[4] = {
0.5, 0.5, 1,1 };
auto igesActor = ReadIges("D:/TEST/3D/igs/激光剑 .igs");
auto rendererIges = vtkSmartPointer< vtkRenderer >::New();
rendererIges->SetViewport(xmins[0], ymins[0], xmaxs[0], ymaxs[0]);
rendererIges->AddActor(igesActor);
auto stepActor = ReadStep("D:/TEST/3D/step/Assem1.STEP");
auto rendererStep = vtkSmartPointer< vtkRenderer >::New();
rendererStep->SetViewport(xmins[1], ymins[1], xmaxs[1], ymaxs[1]);
rendererStep->AddActor(stepActor);
auto topoActor = TopoDSShapeSphere();
auto rendererTopo = vtkSmartPointer< vtkRenderer >::New();
rendererTopo->SetViewport(xmins[2], ymins[2], xmaxs[2], ymaxs[2]);
rendererTopo->AddActor(topoActor);
auto vTKpointOnMeshes = VTKpointOnMeshes("D:/TEST/3D/step/叶片.STEP");
auto rendererVTKpointOnMeshes = vtkSmartPointer< vtkRenderer >::New();
rendererVTKpointOnMeshes->SetViewport(xmins[3], ymins[3], xmaxs[3], ymaxs[3]);
rendererVTKpointOnMeshes->AddActor(vTKpointOnMeshes);
vtkNew<vtkAxesActor> axes;
// 总长
// 初始化数组
double axesLength[3]{
100,100,100 };
axes->SetTotalLength(axesLength);
rendererIges->AddActor(axes);
vtkWidget->renderWindow()->AddRenderer(rendererIges);
vtkWidget->renderWindow()->AddRenderer(rendererStep);
vtkWidget->renderWindow()->AddRenderer(rendererTopo);
vtkWidget->renderWindow()->AddRenderer(rendererVTKpointOnMeshes);
}
VTKOCCT::~VTKOCCT()
{
}
##效果
边栏推荐
- How did I grow up in the past eight years as a test engineer of meituan? I hope technicians can gain something after reading it
- 大厂技术专家:工程师如何提升沟通能力?
- 【obs】封装obs实现采集的基础流程
- One hot code
- The element form shows the relationship between elementary transformation and elementary matrix
- 00后抛弃互联网: 毕业不想进大厂,要去搞最潮Web3
- php如何解决高并发问题
- Analysis of JMM memory model
- CorelDRAW Graphics Suite 2022新版功能详情介绍
- Numpy np.max和np.maximum实现relu函数
猜你喜欢

MATLAB extrait les données numériques d'un fichier txt irrégulier (simple et pratique)
2022 东北四省赛 VP记录/补题

英特尔13代酷睿旗舰曝光,单核5.5GHz
进程与线程
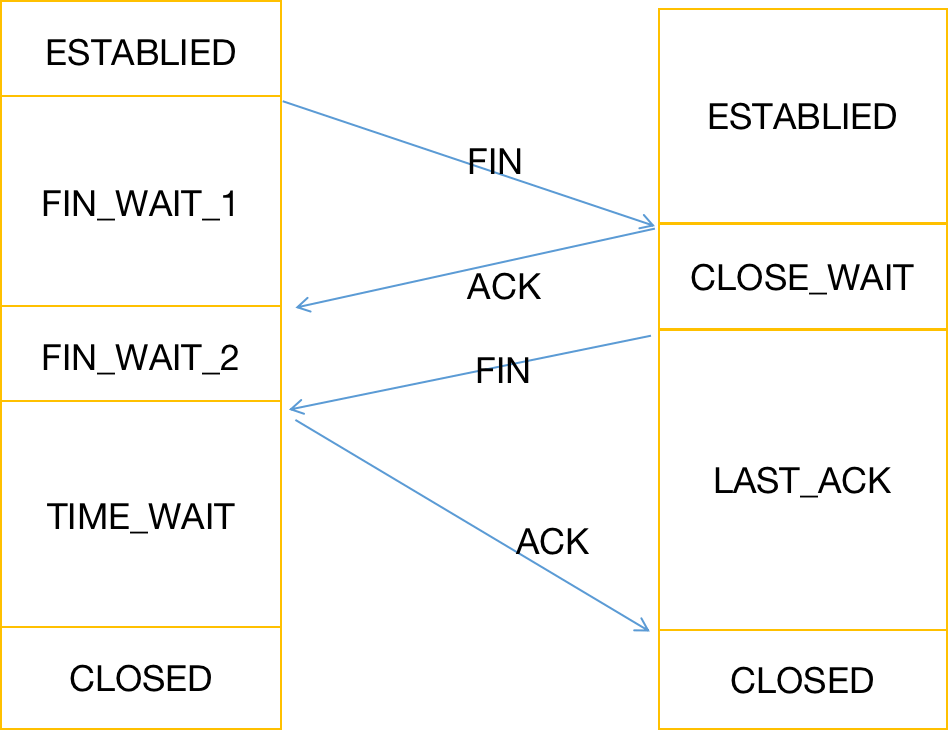
php服务器 与redis交互大量CLOSE_WAIT分析
行业唯一!法大大电子合同上榜36氪硬核科技企业

ASP. Net hotel management system
解决undefined reference to `__aeabi_uidivmod‘和undefined reference to `__aeabi_uidiv‘错误

Gut | Yu Jun group of the Chinese University of Hong Kong revealed that smoking changes intestinal flora and promotes colorectal cancer (do not smoke)

多维度监控:智能监控的数据基础
随机推荐
Programmers' entrepreneurial trap: taking private jobs
[VTK] vtkWindowedSincPolyDataFilter 源码注释解读
有赞CTO崔玉松:有赞Jarvis核心目标是使产品变得更加聪明和可靠
Project management essence reading notes (VII)
Technical experts from large factories: how can engineers improve their communication skills?
Gut | Yu Jun group of the Chinese University of Hong Kong revealed that smoking changes intestinal flora and promotes colorectal cancer (do not smoke)
C语言日志库zlog基本使用
Empire CMS no thumbnail smart tag (e:loop) two ways to judge whether there is a titlepic
2. Hal hardware abstraction layer
Solicitation for JGG special issue: spatio-temporal omics
How did I grow up in the past eight years as a test engineer of meituan? I hope technicians can gain something after reading it
项目管理精华读书笔记(六)
After a month, I finally got Kingdee offer! Share tetrahedral Sutra + review materials
Solve undefined reference to`__ aeabi_ Uidivmod 'and undefined reference to`__ aeabi_ Uidiv 'error
搭建ADG后,实例2无法启动 ORA-29760: instance_number parameter not specified
After setting up ADG, instance 2 cannot start ora-29760: instance_ number parameter not specified
Multi dimensional monitoring: the data base of intelligent monitoring
Using onvif protocol to operate the device
Asyncio warning deprecationwarning: there is no current event loop
Bi skills - permission axis