当前位置:网站首页>Basic information of mujoco
Basic information of mujoco
2022-07-07 00:27:00 【Feisy】
Basic information
Mujoco It is a cross platform robot modeling software .
The official introduction is like this :
MuJoCo is a physics engine that aims to facilitate research and development in robotics, biomechanics, graphics and animation, and other areas where fast and accurate simulation is needed.
differ webots Of 1G More size ,Mujoco windows Only 5.7M, I almost thought I was dazzled .
Download address :https://mujoco.org/
Interface
Operation mode
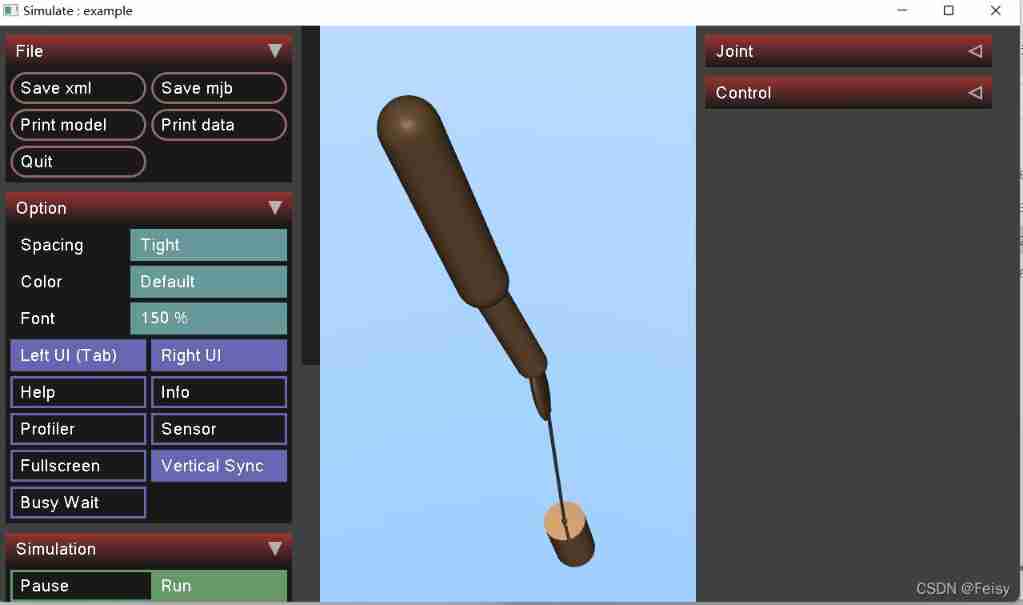
Model view
windows/linux Direct double click /bin In the catalog Simulate open programs
Then, the xml Drag the file into the interface , You can see the model
control
Mujoco You need to write a program to control .
In the absence of a controller , look Mujoco Will give your model a default control program
The development of control program is based on C Interface , such as , A simple example of a control program :
#include<stdbool.h> //for bool
//#include<unistd.h> //for usleep
#include<math.h>
#include "mujoco.h"
#include "glfw3.h"
#include "stdio.h"
#include "stdlib.h"
#include "string.h"
char filename[] = "../myproject/projectile/ball.xml";
// MuJoCo data structures
mjModel* m = NULL; // MuJoCo model
mjData* d = NULL; // MuJoCo data
mjvCamera cam; // abstract camera
mjvOption opt; // visualization options
mjvScene scn; // abstract scene
mjrContext con; // custom GPU context
// mouse interaction
bool button_left = false;
bool button_middle = false;
bool button_right = false;
double lastx = 0;
double lasty = 0;
// holders of one step history of time and position to calculate dertivatives
mjtNum position_history = 0;
mjtNum previous_time = 0;
// controller related variables
float_t ctrl_update_freq = 100;
mjtNum last_update = 0.0;
mjtNum ctrl;
// keyboard callback
void keyboard(GLFWwindow* window, int key, int scancode, int act, int mods)
{
// backspace: reset simulation
if( act==GLFW_PRESS && key==GLFW_KEY_BACKSPACE )
{
mj_resetData(m, d);
mj_forward(m, d);
}
}
// mouse button callback
void mouse_button(GLFWwindow* window, int button, int act, int mods)
{
// update button state
button_left = (glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_LEFT)==GLFW_PRESS);
button_middle = (glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_MIDDLE)==GLFW_PRESS);
button_right = (glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_RIGHT)==GLFW_PRESS);
// update mouse position
glfwGetCursorPos(window, &lastx, &lasty);
}
// mouse move callback
void mouse_move(GLFWwindow* window, double xpos, double ypos)
{
// no buttons down: nothing to do
if( !button_left && !button_middle && !button_right )
return;
// compute mouse displacement, save
double dx = xpos - lastx;
double dy = ypos - lasty;
lastx = xpos;
lasty = ypos;
// get current window size
int width, height;
glfwGetWindowSize(window, &width, &height);
// get shift key state
bool mod_shift = (glfwGetKey(window, GLFW_KEY_LEFT_SHIFT)==GLFW_PRESS ||
glfwGetKey(window, GLFW_KEY_RIGHT_SHIFT)==GLFW_PRESS);
// determine action based on mouse button
mjtMouse action;
if( button_right )
action = mod_shift ? mjMOUSE_MOVE_H : mjMOUSE_MOVE_V;
else if( button_left )
action = mod_shift ? mjMOUSE_ROTATE_H : mjMOUSE_ROTATE_V;
else
action = mjMOUSE_ZOOM;
// move camera
mjv_moveCamera(m, action, dx/height, dy/height, &scn, &cam);
}
// scroll callback
void scroll(GLFWwindow* window, double xoffset, double yoffset)
{
// emulate vertical mouse motion = 5% of window height
mjv_moveCamera(m, mjMOUSE_ZOOM, 0, -0.05*yoffset, &scn, &cam);
}
// main function
int main(int argc, const char** argv)
{
// activate software
mj_activate("mjkey.txt");
// load and compile model
char error[1000] = "Could not load binary model";
// check command-line arguments
if( argc<2 )
m = mj_loadXML(filename, 0, error, 1000);
else
if( strlen(argv[1])>4 && !strcmp(argv[1]+strlen(argv[1])-4, ".mjb") )
m = mj_loadModel(argv[1], 0);
else
m = mj_loadXML(argv[1], 0, error, 1000);
if( !m )
mju_error_s("Load model error: %s", error);
// make data
d = mj_makeData(m);
// init GLFW
if( !glfwInit() )
mju_error("Could not initialize GLFW");
// create window, make OpenGL context current, request v-sync
GLFWwindow* window = glfwCreateWindow(1244, 700, "Demo", NULL, NULL);
glfwMakeContextCurrent(window);
glfwSwapInterval(1);
// initialize visualization data structures
mjv_defaultCamera(&cam);
mjv_defaultOption(&opt);
mjv_defaultScene(&scn);
mjr_defaultContext(&con);
mjv_makeScene(m, &scn, 2000); // space for 2000 objects
mjr_makeContext(m, &con, mjFONTSCALE_150); // model-specific context
// install GLFW mouse and keyboard callbacks
glfwSetKeyCallback(window, keyboard);
glfwSetCursorPosCallback(window, mouse_move);
glfwSetMouseButtonCallback(window, mouse_button);
glfwSetScrollCallback(window, scroll);
double arr_view[] = {
90,-45, 4, 0.000000, 0.000000, 0.000000};
cam.azimuth = arr_view[0];
cam.elevation = arr_view[1];
cam.distance = arr_view[2];
cam.lookat[0] = arr_view[3];
cam.lookat[1] = arr_view[4];
cam.lookat[2] = arr_view[5];
//m->opt.gravity[2]=-1;
//qpos is dim nqx1 = 7x1; 3 translations + 4 quaternions
d->qpos[2]=0.1;
d->qvel[2]=5;
d->qvel[0]=2;
// use the first while condition if you want to simulate for a period.
while( !glfwWindowShouldClose(window))
{
// advance interactive simulation for 1/60 sec
// Assuming MuJoCo can simulate faster than real-time, which it usually can,
// this loop will finish on time for the next frame to be rendered at 60 fps.
// Otherwise add a cpu timer and exit this loop when it is time to render.
mjtNum simstart = d->time;
while( d->time - simstart < 1.0/60.0 )
{
mj_step(m, d);
//drag force = -c*v^2*unit_vector(v); v = sqrt(vx^2+vy^2+vz^2)
// vector (v) = vx i + vy j + vz k
//unit_vector(v) = vector(v)/v
//fx = -c*v*vx;
//fy = -c*v*vy;
//fz = -c*v*vz;
double vx, vy, vz;
vx = d->qvel[0]; vy = d->qvel[1]; vz = d->qvel[2];
double v;
v = sqrt(vx*vx+vy*vy+vz*vz);
double fx, fy, fz;
double c = 1;
fx = -c*v*vx;
fy = -c*v*vy;
fz = -c*v*vz;
d->qfrc_applied[0]=fx;
d->qfrc_applied[1]=fy;
d->qfrc_applied[2]=fz;
}
// get framebuffer viewport
mjrRect viewport = {
0, 0, 0, 0};
glfwGetFramebufferSize(window, &viewport.width, &viewport.height);
// update scene and render
opt.frame = mjFRAME_WORLD;
cam.lookat[0] = d->qpos[0];
mjv_updateScene(m, d, &opt, NULL, &cam, mjCAT_ALL, &scn);
mjr_render(viewport, &scn, &con);
//printf("{%f, %f, %f, %f, %f, %f};\n",cam.azimuth,cam.elevation, cam.distance,cam.lookat[0],cam.lookat[1],cam.lookat[2]);
// swap OpenGL buffers (blocking call due to v-sync)
glfwSwapBuffers(window);
// process pending GUI events, call GLFW callbacks
glfwPollEvents();
}
// free visualization storage
mjv_freeScene(&scn);
mjr_freeContext(&con);
// free MuJoCo model and data, deactivate
mj_deleteData(d);
mj_deleteModel(m);
mj_deactivate();
// terminate GLFW (crashes with Linux NVidia drivers)
#if defined(__APPLE__) || defined(_WIN32)
glfwTerminate();
#endif
return 1;
}
This form of control , It can be easily combined with your control system , For example, build a data pipeline , take
The data of the system is transmitted to Mujoco Inside , It doesn't even need to be coupled to your system .
Modeling support
There are two ways , One is xml, The other is Mujoco Peculiar
in addition , Support stl Import .
One use stl To render an example of a biped robot :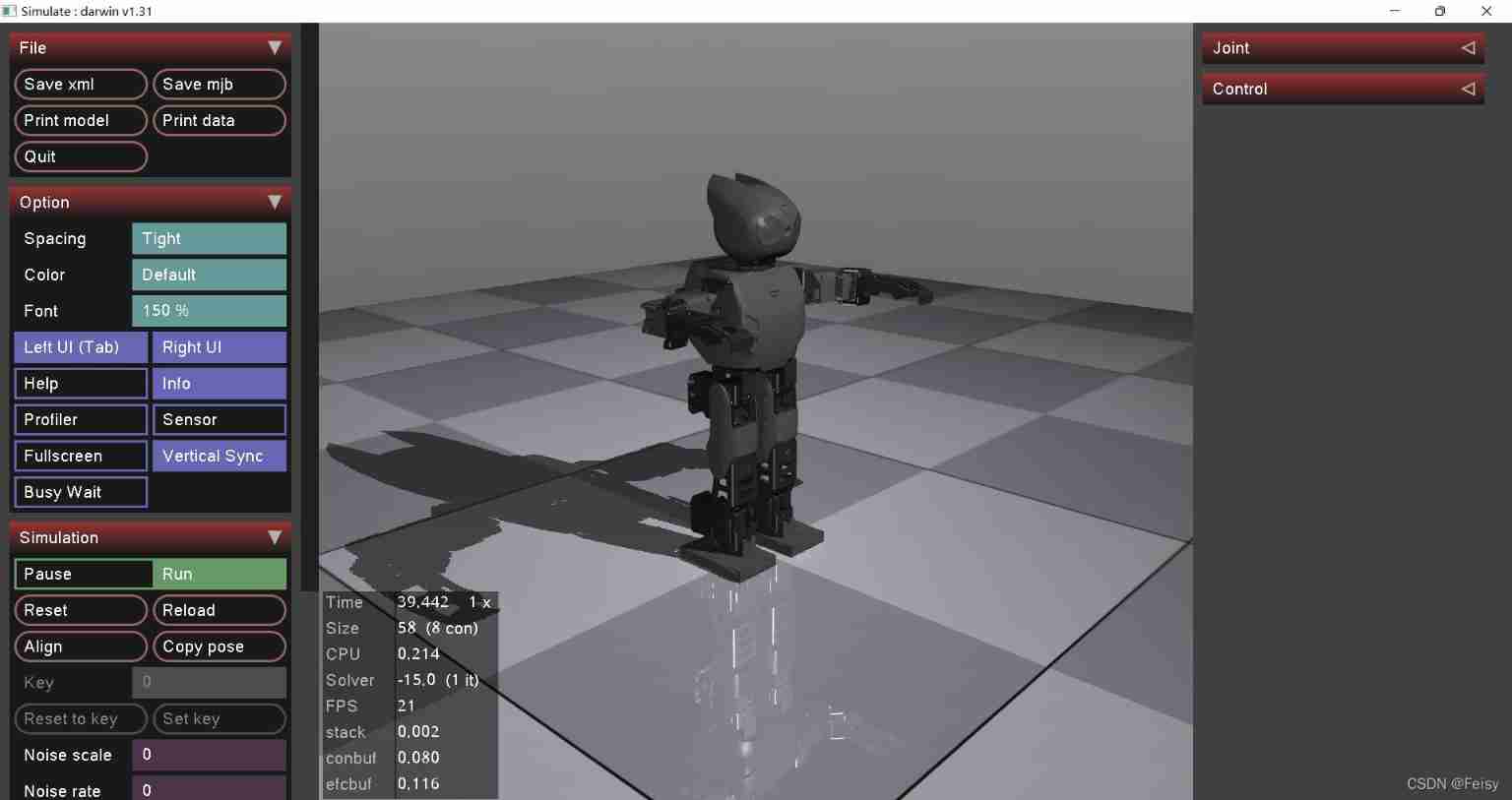
<!-- ====================================================== This file is part of MuJoCo. Copyright 2009-2016 Roboti LLC. Model :: darwin Mujoco :: Advanced physics simulation engine Source : www.roboti.us Version : 1.31 Released : 23Apr16 Author :: Vikash Kumar Contacts : [email protected] Last edits : 30Apr16, 14Dec'15, 30Nov'15, 5Nov'15 ====================================================== -->
<mujoco model="darwin v1.31">
<compiler angle="radian" inertiafromgeom="true" meshdir="meshes/"/>
<size nconmax="100" njmax="500" nstack="-1"/>
<default>
<geom material="MatFrame" margin='0.001' />
<joint limited='true' frictionloss="0.2" damping="1.06" armature="0.011" axis="0 0 1" pos="0 0 0"/>
<position ctrllimited='true' kp='2.65'/>
</default>
<asset>
<mesh file="body_coll.stl"/>
<mesh file="neck_coll.stl"/>
<mesh file="head_coll.stl"/>
<mesh file="shoulder_l_coll.stl"/>
<mesh file="arm_high_l_coll.stl"/>
<mesh file="shoulder_r_coll.stl"/>
<mesh file="arm_high_r_coll.stl"/>
<mesh file="pelvis_l_coll.stl"/>
<mesh file="thigh1_l_coll.stl"/>
<mesh file="thigh2_l_coll.stl"/>
<mesh file="tibia_l_coll.stl"/>
<mesh file="ankle1_l_coll.stl"/>
<mesh file="ankle2_l_coll.stl"/>
<mesh file="pelvis_r_coll.stl"/>
<mesh file="thigh1_r_coll.stl"/>
<mesh file="thigh2_r_coll.stl"/>
<mesh file="tibia_r_coll.stl"/>
<mesh file="tibia_naked.stl" scale="0.001 0.001 0.001"/>
<mesh file="ankle1_r_coll.stl"/>
<mesh file="ankle2_r_coll.stl"/>
<mesh file="arm_metal_lowres.stl" scale="0.001 0.001 0.001"/>
<texture type="skybox" builtin="gradient" rgb1="1 1 1" rgb2="0 0 0" width="100" height="100"/>
<texture name="groundplane" type="2d" builtin="checker" rgb1=".7 .7 .75" rgb2=".9 .9 .95" width="500" height="500" mark="edge" markrgb=".1 .1 .1"/>
<material name="MatPlastic" specular=".8" shininess=".6" reflectance="0.5" rgba=".4 .41 .4 1"/>
<material name="MatFrame" specular="1.2" shininess=".1" reflectance="0.5" rgba=".21 .2 .2 1"/>
<material name="MatGnd" texture="groundplane" texrepeat="5 5" specular=".5" shininess=".01" reflectance="0.1"/>
</asset>
<contact>
<exclude body1="head" body2="torso"/>
<exclude body1="foot_l" body2="tibia_l"/>
<exclude body1="foot_r" body2="tibia_r"/>
</contact>
<worldbody>
<light directional="false" cutoff="60" exponent="1" diffuse=".5 .5 .5" specular=".1 .1 .1" pos="0.5 0.1 0.8" dir="-0.5 -0.1 -0.8"/>
<geom name="ground" pos="0 0 0" size="2 2 1" material="MatGnd" type="plane"/>
<body name="torso" pos="0 0 0.4">
<inertial diaginertia="6.53693 6.39822 1.88344" mass="0.975599" pos="-0.003053 -0.038651 -0.019268" quat="-0.00879356 0.867004 0.0524199 0.495458"/>
<joint type="free" limited='false' damping="0" stiffness="0" armature="0"/>
<geom mesh="body_coll" type="mesh" material="MatPlastic"/>
<body name="neck" pos="0 0 0.0235" quat="0.707107 0 0 0.707107">
<inertial diaginertia="0.00482356 0.00482356 0.00482356" mass="0.0243577" pos="0.001424 -0.016567 -0.007128" quat="0.640564 0.00150549 0.00338323 0.767896"/>
<joint name="head_pan" range="-3.141592 3.141592" type="hinge"/>
<geom mesh="neck_coll" type="mesh" contype='0' conaffinity='0'/>
<body name="head" pos="0 0 0.02715" quat="0.5 -0.5 -0.5 0.5">
<inertial diaginertia="0.158397 0.123969 0.1178" mass="0.158042" pos="6.4e-005 -0.018565 -0.007667" quat="0.504401 0.495706 -0.489128 0.510499"/>
<joint name="head_tilt" range="-.4363323 .959931089" type="hinge"/>
<geom mesh="head_coll" type="mesh" material="MatPlastic"/>
</body>
</body>
<body name="shoulder_l" pos="0 0.06035 0" quat=".5 -.5 -.5 -.5">
<inertial diaginertia="0.0118742 0.00851644 0.00537304" mass="0.013" pos="-0.0135226 0.0102641 0.00139357" quat="0.89853 0.0814684 0.0409894 0.429332"/>
<joint name="l_shoulder_pitch" range="-2.61799 2.61799" type="hinge"/>
<geom mesh="shoulder_l_coll" type="mesh" contype='0' conaffinity='0'/>
<body name="arm_high_l" pos="-0.016 0 0.025" quat="0.5 0.5 0.5 -0.5">
<inertial diaginertia="0.122178 0.113353 0.0379938" mass="0.17837715" pos="-0.036239 0.000734 0.00066" quat="0.713991 0.698029 0.0283632 -0.0465622"/>
<joint name="l_shoulder_roll" range="-1.308997 2.356194" type="hinge"/>
<geom mesh="arm_high_l_coll" type="mesh" material="MatPlastic"/>
<body name="arm_low_l" pos="-.06 0 -.016" quat="0 0 0.707107 0.707107">
<inertial diaginertia="0.0875091 0.0872503 0.0201335" mass="0.037" pos=".013 -.015 0" quat=".707107 0 0 .315"/>
<joint name="l_elbow" range="-1.3 1.57" type="hinge"/>
<geom mesh="shoulder_l_coll" pos='.016 -.025 0' euler='-1.57 0 0' type="mesh"/>
<geom mesh="arm_metal_lowres" pos='.021 0.0055 -0.081' euler='0 -1.57 0' type="mesh"/>
</body>
</body>
</body>
<body name="shoulder_r" pos="0 -0.06035 0" euler='1.57 0 1.57'>
<inertial diaginertia="0.0118742 0.00851644 0.00537304" mass="0.013" pos="-0.013523 0.010264 0.001394" quat="0.89853 0.0814684 0.0409894 0.429332"/>
<joint name="r_shoulder_pitch" range="-3.141592 3.141592" type="hinge"/>
<geom mesh="shoulder_r_coll" type="mesh" contype='0' conaffinity='0'/>
<body name="arm_high_r" pos="-0.017 0 0.02478" quat='.5 -.5 .5 .5' >
<inertial diaginertia="0.122178 0.113353 0.0379938" mass="0.168377" pos="-0.036239 0.000734 -0.00066" quat="0.713991 0.698029 0.0283632 -0.0465622"/>
<joint name="r_shoulder_roll" range="-2.356194 1.308997" type="hinge"/>
<geom mesh="arm_high_r_coll" type="mesh" material="MatPlastic"/>
<body name="arm_low_r" pos="-0.06 0 0.016" quat="9.38186e-007 -9.38186e-007 0.707107 0.707107">
<inertial diaginertia="0.0875091 0.0872503 0.0201335" mass="0.0592885" pos="0 0 0" quat="0.362962 0.448533 -0.589325 0.565485"/>
<joint name="r_elbow" range="-1.57 1.3" type="hinge"/>
<geom mesh="shoulder_l_coll" pos='.017 -.0575 0' euler='-1.57 0 0' type="mesh"/>
<geom mesh="arm_metal_lowres" pos='.012 -0.027 0.081' euler='0 1.57 0' type="mesh"/>
</body>
</body>
</body>
<body name="pelvis_l" pos="-0.005 0.037 -0.09355" quat="0 0.707107 0.707107 0">
<inertial diaginertia="0.122641 0.11137 0.0411301" mass="0.027069" pos="0 0.00048 0.018437" quat="0.998273 -0.0514899 -0.00396715 0.0279885"/>
<joint name="l_hip_yaw" range="-.9250245036 2.14675498" type="hinge"/>
<geom mesh="pelvis_l_coll" type="mesh" contype='0' conaffinity='0'/>
<body name="thigh1_l" pos="0 0 0.028652" quat="0.707107 0.707107 0 0">
<inertial diaginertia="0.114985 0.0979692 0.0327798" mass="0.167107" pos="7.9e-005 0.018242 0.013873" quat="0.485806 0.506867 -0.504884 0.502165"/>
<joint name="l_hip_roll" range="-1.0297442587 .7853981634" type="hinge"/>
<geom mesh="thigh1_l_coll" type="mesh"/>
<body name="thigh2_l" pos="0 0 0" quat="0.5 0.5 -0.5 -0.5">
<inertial diaginertia="0.114985 0.0979692 0.0327798" mass="0.119043" pos="-0.062965 -0.000323 0.000692" quat="0.485806 0.506867 -0.504884 0.502165"/>
<joint name="l_hip_pitch" range="-.5061454831 1.745329252" type="hinge"/>
<geom mesh="thigh2_l_coll" type="mesh" material="MatPlastic"/>
<body name="tibia_l" pos="-0.093 0 0">
<inertial diaginertia="0.115891 0.0933882 0.043901" mass="0.0703098" pos="-0.053955 0.006548 -0.000592" quat="0.456916 0.538297 -0.548699 0.447654"/>
<joint name="l_knee" range="-2.2689280276 .1047197551" type="hinge"/>
<geom mesh="tibia_naked" pos='0.145 0 0.037' euler='1.57 0 -1.57' type="mesh"/>
<body name="ankle1_l" pos="-0.093 0 0" quat="0 1 0 0">
<inertial diaginertia="0.120855 0.109532 0.0411304" mass="0.167108" pos="-0.000214 -0.018536 0.013873" quat="0.997965 0.0519065 0.00385358 -0.0368208"/>
<joint name="l_ankle_pitch" range="-1.3962634016 1.2566370614" type="hinge"/>
<geom mesh="ankle1_l_coll" type="mesh"/>
<body name="foot_l" pos="0 0 0" quat="0.707107 -0.707107 0 0">
<inertial diaginertia="0.120855 0.109532 0.0411304" mass="0.0794462" pos="-0.025995 -0.009506 -0.000503" quat="0.997965 0.0519065 0.00385358 -0.0368208"/>
<joint name="l_ankle_roll" range="-1.0995574288 .7679448709" type="hinge"/>
<geom mesh="ankle2_l_coll" type="mesh" material="MatPlastic" contype='0' conaffinity='0'/>
<geom type="box" pos="-.027 -.01 0" size=".007 .032 .052" material="MatPlastic"/>
</body>
</body>
</body>
</body>
</body>
</body>
<body name="pelvis_r" pos="-0.005 -0.037 -0.09355" quat="0 -0.707107 0.707107 0">
<inertial diaginertia="0.122641 0.11137 0.0411301" mass="0.027069" pos="0 0.00048 0.018437" quat="0.998273 -0.0514899 -0.00396715 0.0279885"/>
<joint name="r_hip_yaw" range="-2.14675498 .9250245036" type="hinge"/>
<geom mesh="pelvis_r_coll" type="mesh" contype='0' conaffinity='0'/>
<body name="thigh1_r" pos="0 0 0.028652" quat="0.707107 -0.707107 0 0">
<inertial diaginertia="0.114985 0.0979692 0.0327798" mass="0.167107" pos="7.9e-005 -0.018242 0.0138735" quat="0.485806 0.506867 -0.504884 0.502165"/>
<joint name="r_hip_roll" range="-.7853981634 1.0297442587" type="hinge"/>
<geom mesh="thigh1_r_coll" type="mesh"/>
<body name="thigh2_r" pos="0 0 0" quat="0.5 0.5 -0.5 -0.5">
<inertial diaginertia="0.114985 0.0979692 0.0327798" mass="0.119043" pos="0.062965 -0.000323 0.000692" quat="0.485806 0.506867 -0.504884 0.502165"/>
<joint name="r_hip_pitch" range="-1.745329252 .5061454831" type="hinge"/>
<geom mesh="thigh2_r_coll" type="mesh" material="MatPlastic"/>
<body name="tibia_r" pos="0.093 0 0">
<inertial diaginertia="0.115891 0.0933882 0.043901" mass="0.0703098" pos="0.053955 0.006548 -0.000592" quat="0.456916 0.538297 -0.548699 0.447654"/>
<joint name="r_knee" range="-.1047197551 2.2689280276" type="hinge"/>
<geom mesh="tibia_naked" pos='-0.145 0 -0.037' euler='1.57 0 1.57' type="mesh"/>
<body name="ankle1_r" pos="0.093 0 0" quat="0 1 0 0">
<inertial diaginertia="0.120855 0.109532 0.0411304" mass="0.167108" pos="-0.000214 -0.018536 -0.013873" quat="0.997965 0.0519065 0.00385358 -0.0368208"/>
<joint name="r_ankle_pitch" range="-1.2566370614 1.3962634016" type="hinge"/>
<geom mesh="ankle1_r_coll" type="mesh" />
<body name="foot_r" pos="0 0 0" quat="0.707107 -0.707107 0 0">
<inertial diaginertia="0.120855 0.109532 0.0411304" mass="0.0794462" pos="0.025995 -0.009506 -0.000503" quat="0.997965 0.0519065 0.00385358 -0.0368208"/>
<joint name="r_ankle_roll" range="-.7679448709 1.0995574288" type="hinge"/>
<geom mesh="ankle2_r_coll" type="mesh" material="MatPlastic" contype='0' conaffinity='0'/>
<geom type="box" pos=".027 -.01 0" size=".007 .032 .052" material="MatPlastic"/>
</body>
</body>
</body>
</body>
</body>
</body>
</body>
</worldbody>
<actuator>
<position name='r_shoulder_pitch' joint='r_shoulder_pitch'ctrlrange='-1.5 1.5' />
<position name='r_shoulder_roll' joint='r_shoulder_roll' ctrlrange='-.85 1.3' />
<position name='r_elbow' joint='r_elbow' ctrlrange='-1.55 1.25' />
<position name='r_hip_yaw' joint='r_hip_yaw' ctrlrange='-1 .9' />
<position name='r_hip_roll' joint='r_hip_roll' ctrlrange='-.7 .45' />
<position name='r_hip_pitch' joint='r_hip_pitch' ctrlrange='-1.7 .45' />
<position name='r_knee' joint='r_knee' ctrlrange='-0.05 2.2' />
<position name='r_ankle_pitch' joint='r_ankle_pitch' ctrlrange='-1.2 1.35' />
<position name='r_ankle_roll' joint='r_ankle_roll' ctrlrange='-.7 .95' />
<position name='l_shoulder_pitch' joint='l_shoulder_pitch'ctrlrange='-1.5 1.5' />
<position name='l_shoulder_roll' joint='l_shoulder_roll' ctrlrange='-1.25 .85' />
<position name='l_elbow' joint='l_elbow' ctrlrange='-1.25 1.55' />
<position name='l_hip_yaw' joint='l_hip_yaw' ctrlrange='-.9 1' />
<position name='l_hip_roll' joint='l_hip_roll' ctrlrange='-.45 .7' />
<position name='l_hip_pitch' joint='l_hip_pitch' ctrlrange='-.45 1.7' />
<position name='l_knee' joint='l_knee' ctrlrange='-2.2 .05' />
<position name='l_ankle_pitch' joint='l_ankle_pitch' ctrlrange='-1.35 1.2' />
<position name='l_ankle_roll' joint='l_ankle_roll' ctrlrange='-.95 .7' />
<position name='head_pan' joint='head_pan' ctrlrange='-2 2' />
<position name='head_tilt' joint='head_tilt' ctrlrange='-.4 .9' />
</actuator>
</mujoco>
边栏推荐
- What is a responsive object? How to create a responsive object?
- 【vulnhub】presidential1
- 【2022全网最细】接口测试一般怎么测?接口测试的流程和步骤
- Rails 4 asset pipeline vendor asset images are not precompiled
- 专为决策树打造,新加坡国立大学&清华大学联合提出快速安全的联邦学习新系统
- 2022/2/12 summary
- What can the interactive slide screen demonstration bring to the enterprise exhibition hall
- The difference between redirectto and navigateto in uniapp
- Google, Baidu and Yahoo are general search engines developed by Chinese companies_ Baidu search engine URL
- 工程师如何对待开源 --- 一个老工程师的肺腑之言
猜你喜欢
智能运维应用之道,告别企业数字化转型危机
How engineers treat open source -- the heartfelt words of an old engineer
uniapp中redirectTo和navigateTo的区别
2022/2/12 summary
如何判断一个数组中的元素包含一个对象的所有属性值
48 page digital government smart government all in one solution

Jenkins' user credentials plug-in installation
【自动化测试框架】关于unittest你需要知道的事
rancher集成ldap,实现统一账号登录

沉浸式投影在线下展示中的三大应用特点
随机推荐
Common shortcuts to idea
沉浸式投影在线下展示中的三大应用特点
JWT signature does not match locally computed signature. JWT validity cannot be asserted and should
pinia 模块划分
【CVPR 2022】半监督目标检测:Dense Learning based Semi-Supervised Object Detection
DAY ONE
What is a responsive object? How to create a responsive object?
什么是响应式对象?响应式对象的创建过程?
互动滑轨屏演示能为企业展厅带来什么
PostgreSQL高可用之repmgr(1主2从+1witness)+Pgpool-II实现主从切换+读写分离
华为mate8电池价格_华为mate8换电池后充电巨慢
Everyone is always talking about EQ, so what is EQ?
Leecode brush questions record sword finger offer 43 The number of occurrences of 1 in integers 1 to n
Are you ready to automate continuous deployment in ci/cd?
Supersocket 1.6 creates a simple socket server with message length in the header
PostgreSQL uses pgpool II to realize read-write separation + load balancing
uniapp实现从本地上传头像并显示,同时将头像转化为base64格式存储在mysql数据库中
1000 words selected - interface test basis
[boutique] Pinia Persistence Based on the plug-in Pinia plugin persist
Command line kills window process