当前位置:网站首页>3 d laser slam: LeGO - LOAM - ground point extracting method and the analysis of the code
3 d laser slam: LeGO - LOAM - ground point extracting method and the analysis of the code
2022-08-02 10:12:00 【HUAWEI CLOUD】
前言
Ground point extraction method
LeGO-LOAMA very important point in the improvement of the mid-front end is to make full use of the ground points,This blog post mainly explains How to do ground point extraction
如下图所示,相邻的两个scan的同一列,hit the ground,form two pointsA和B.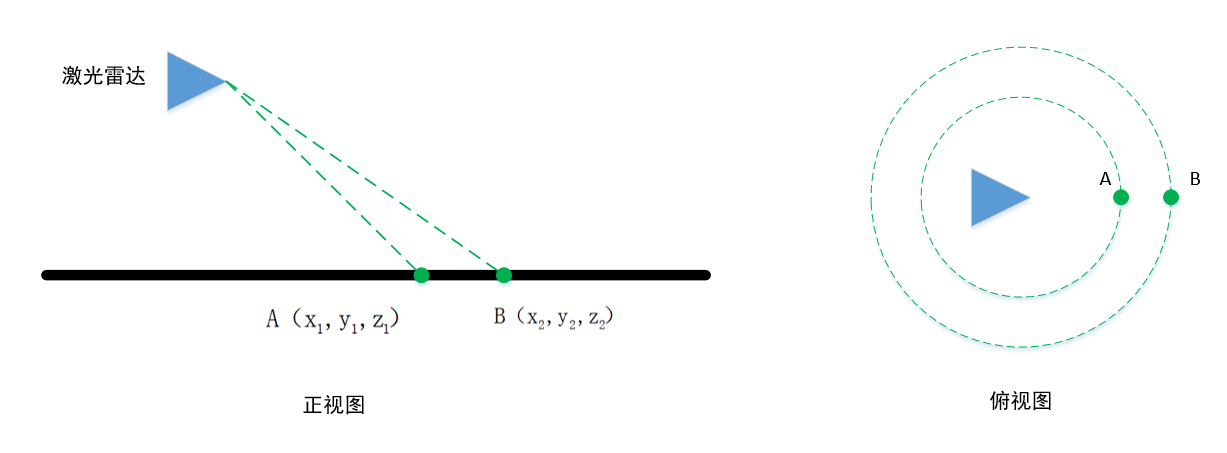
Their vertical height difference is h,This value is ideal(The radar is installed horizontally,The ground is level)接近于0
Poor horizontal distanced
The angle with the horizontal plane is 
If it is a ground point,在理想情况下,This corner is close0.
But the radar installation will not be completely horizontal,And the ground is not flat,So this angle will be greater than 0,LeGO-LOAM设置的是10°.
即小于10°is judged to be a ground point
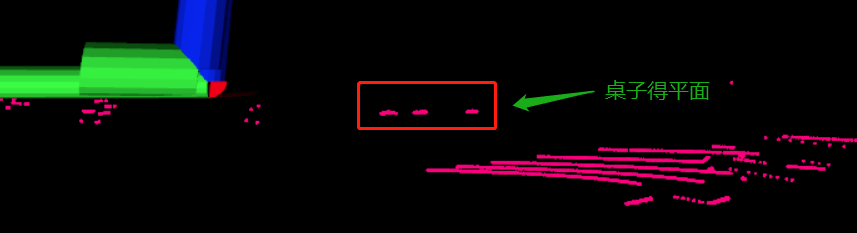
The extraction algorithm of this ground point is a bit too simplistic,It can also be combined with the lidar installation height,Wait for other information to judge.例如下面这种情况,are also judged as ground points: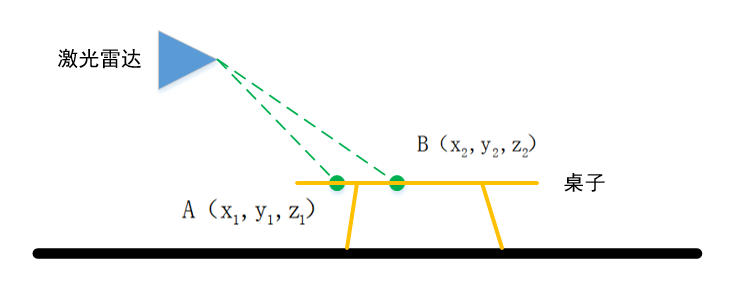
代码分析
LeGO-LOAMThe code for the ground extraction is in imageProjection.cpp 中 groundRemoval 函数
void groundRemoval(){ size_t lowerInd, upperInd; float diffX, diffY, diffZ, angle;lowerInd, upperInd 是相邻scanThe index value of the upper point
diffX, diffY, diffZ, angle 是 dx dy dz 水平角
for (size_t j = 0; j < Horizon_SCAN; ++j){//Traverse the points in the horizontal direction 360/0.2 1800个点 for (size_t i = 0; i < groundScanInd; ++i){//groundScanInd 为8 The ground point cannot be on it嵌套两个for循环, Column to be first,Because you want to calculate the value of the same column
第一行,Traverse the points in the horizontal direction 360/0.2 1800个点
第二行,groundScanInd 为8 The ground point cannot be on it
lowerInd = j + ( i )*Horizon_SCAN;//下面的点 upperInd = j + (i+1)*Horizon_SCAN;//上面的点Calculate the indices of the two points
Horizon_SCAN为1800,
if (fullCloud->points[lowerInd].intensity == -1 || fullCloud->points[upperInd].intensity == -1){ // no info to check, invalid points groundMat.at<int8_t>(i,j) = -1;//标志位 至-1 continue; } Determine whether two points are valid,Point is invalidintensity为-1
There is one point that is invalid 标志位 至-1
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;//dx diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;//dy diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;//dz angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;//计算水平角度计算 dx dy dz and horizontal angle,就是这个公式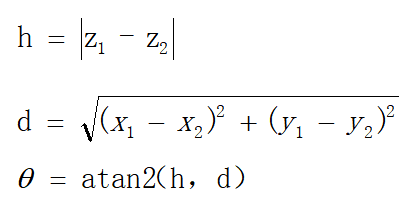
if (abs(angle - sensorMountAngle) <= 10){ groundMat.at<int8_t>(i,j) = 1; groundMat.at<int8_t>(i+1,j) = 1; } } }sensorMountAngle 是 liadr is the inclination angle from the horizontal plane
Here is the horizontal angle of those two points,和10°做比较,Determine whether it is a ground point
How to make put flag bit 至 1
for (size_t i = 0; i < N_SCAN; ++i){ for (size_t j = 0; j < Horizon_SCAN; ++j){ if (groundMat.at<int8_t>(i,j) == 1 || rangeMat.at<float>(i,j) == FLT_MAX){ labelMat.at<int>(i,j) = -1;//labelMat 至为 -1 ,Does not participate in the extraction of subsequent line features and surface features } } }After judging the ground point,Iterate over each point again,
If past that point is Ground point or invalid point,则把 labelMat The point flag on the -1 .
labelMat 至为 -1 ,Does not participate in the extraction of subsequent line features and surface features
//Ground point visualization if (pubGroundCloud.getNumSubscribers() != 0){//If there is a node to subscribe to this ground pointtopic 再进行发布 for (size_t i = 0; i <= groundScanInd; ++i){ for (size_t j = 0; j < Horizon_SCAN; ++j){ if (groundMat.at<int8_t>(i,j) == 1) groundCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]);//add point to Ground point cloud It will be published later } } } }Finally, visualize the ground points
If there is a node to subscribe to this ground pointtopic 再进行发布
遍历0-groundScanInd Get every point,Determine if it is a ground point,then add that point to groundCloud 中
It will be published later
Post it here
// original dense ground cloud if (pubGroundCloud.getNumSubscribers() != 0){ pcl::toROSMsg(*groundCloud, laserCloudTemp); laserCloudTemp.header.stamp = cloudHeader.stamp; laserCloudTemp.header.frame_id = "base_link"; pubGroundCloud.publish(laserCloudTemp); }topicGot the name is/ground_cloud
pubGroundCloud = nh.advertise<sensor_msgs::PointCloud2> ("/ground_cloud", 1);gazebo测试
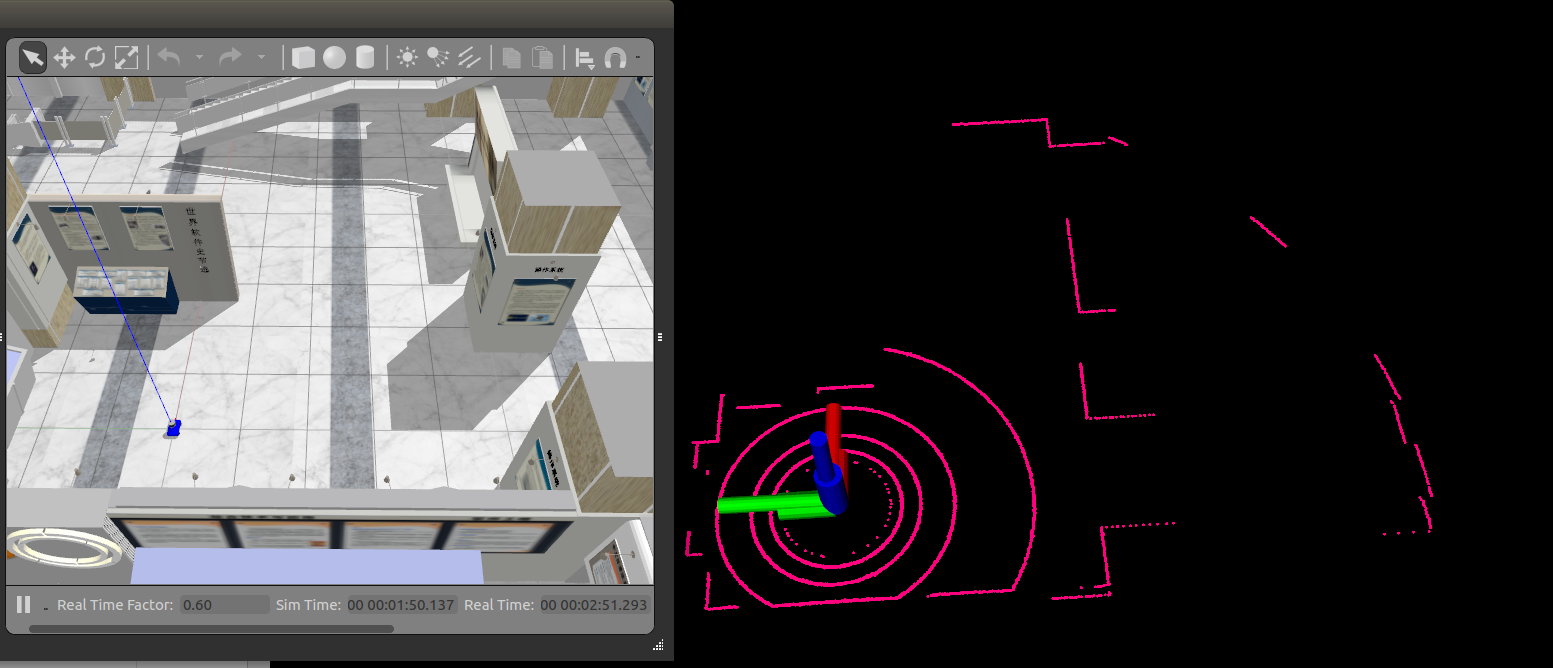
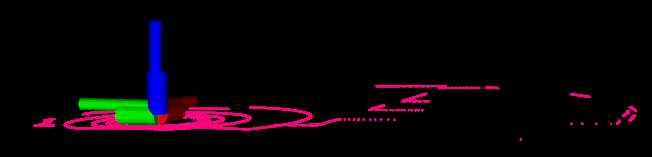
The effect is still pretty good,No outliers occurred
But because there is no height to be judged,As mentioned above, there will be a problem in this case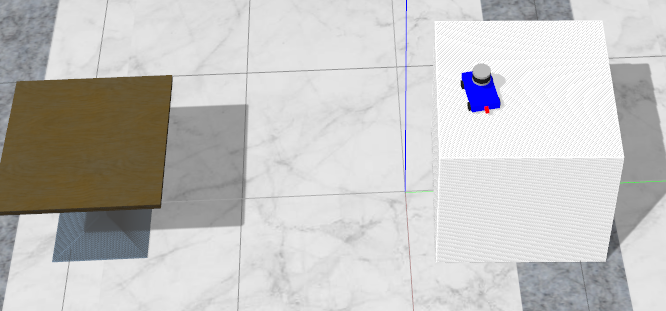
边栏推荐
- Facebook's automated data analysis solution saves worry and effort in advertising
- R语言时间序列数据算术运算:使用log函数将时间序列数据的数值对数化、使用diff函数计算对数化后的时间序列数据的逐次差分(计算价格的对数差分)
- 用了TCP协议,就一定不会丢包嘛?
- Chapter 15 Generics
- win10打印服务无法启动(运行时错误automation)
- sqlmap安装教程用w+r打开(sqlyog安装步骤)
- 软件测试的基本理论知识(软件测试面试基础知识)
- 后管实现面包屑功能
- LayaBox - TypeScript - merge statement
- DVWA Clearance Log 2 - Command Injection
猜你喜欢
MySql tens of millions of paging optimization, fast insertion method of tens of millions of data
Turning and anti-climbing attack and defense

npm ERR! 400 Bad Request - PUT xxx - Cannot publish over previously published version “1.0.0“.

Shell script realizes multi-select DNS simultaneous batch resolution of domain name IP addresses (new update)

周鸿祎称微软抄袭 360 安全模式后发文否认;英特尔CEO基辛格回应市值被AMD超越:股价下跌是咎由自取|极客头条...

iNFTnews | 看见元宇宙的两面,何谓全真互联网和价值互联网?

第十六章 协程

太帅了!我用炫酷大屏展示爬虫数据!
Jay Chou's new song is released, crawl the "Mojito" MV barrage, and see what the fans have to say!

瑞萨RZ/G2L处理器详细测评
随机推荐
js防抖函数和函数节流的应用场景
qq邮箱日发5万邮件群发技术(qq邮箱怎样定时发送邮件)
软件测试之发现和解决bug
Turning and anti-climbing attack and defense
yolov7 innovation point
2022.7.25-7.31 AI行业周刊(第108期):值钱比赚钱更重要
QT专题:组合会话框和文本编辑器
Pytorch的LSTM参数解释
R语言ggplot2可视化:使用ggpubr包的ggbarplot函数可视化堆叠的柱状图(stacked bar plot)、lab.pos参数指定柱状图的数值标签的位置,lab.col参数指定数值标
图形化矩阵,矩阵到底长什么样?
R language time series data arithmetic operation: use the log function to log the time series data, and use the diff function to calculate the successive difference of the logarithmic time series data
享年94岁,图灵奖得主、计算复杂性理论先驱Juris Hartmanis逝世
WPF 截图控件之文字(七)「仿微信」
You Only Hypothesize Once: 用旋转等变描述子估计变换做点云配准(已开源)
Linux system uninstall, install, upgrade, migrate clickHouse database
全方位剖析Numpy中的np.diag源代码
Rust 从入门到精通03-helloworld
软件测试的基本理论知识(软件测试面试基础知识)
开源一夏 | GO语言框架中如何快速集成日志模块
Spearman's correlation coefficient