当前位置:网站首页>CPU的三种工作模式:实模式、保护模式、长模式
CPU的三种工作模式:实模式、保护模式、长模式
2022-07-30 05:45:00 【zpv2jdfc】
实模式
访问内存
实模式也就是说寄存器中存放的地址都是真实地址,比如下面这段程序:
data SEGMENT ;定义一个数据段存放Hello World!
hello DB 'Hello World!$' ;注意要以$结束
data ENDS
code SEGMENT ;定义一个代码段存放程序指令
ASSUME CS:CODE,DS:DATA ;告诉汇编程序,DS指向数据段,CS指向代码段
start:
MOV AX,data ;将data段首地址赋值给AX
MOV DS,AX ;将AX赋值给DS,使DS指向data段
LEA DX,hello ;使DX指向hello首地址
MOV AH,09h ;给AH设置参数09H,AH是AX高8位,AL是AX低8位,其它类似
INT 21h ;执行DOS中断输出DS指向的DX指向的字符串hello
MOV AX,4C00h ;给AX设置参数4C00h
INT 21h ;调用4C00h号功能,结束程序
code ENDS
END start
寄存器CS、DS中都是存放的真实的指令、数据段地址。在计算hello的内存物理地址时,直接将DX左移4位并与DX相加即可(DX为16位,也就是说段的最大偏移为64KB,最多16段)。在实模式下,我们可以读写任意内存地址,在单任务操作系统(比如DOS)中这样做是没问题的,但在多任务操作系统是很危险的。
实模式下的中断
从上面这张图可以看出,实模式下IDTR寄存器保存了中断向量表的起始地址和长度,中断向量表中保存了代码段的基址(装入CS)和段内偏移(装入IP)。有了中断号,很容易就能完成上下文切换。

保护模式
为什么要有保护模式
其一:8086处理器只有20位地址总线,对应1MB的内存空间地址,寻址通过两个寄存器实现。而80386有32位地址总线,对应4GB内存空间,此时再用16位寄存器的话,最大段长64KB的限制显得十分突兀,因此保护模式增加了一些32位的寄存器,如下图:
其二:实模式适用于单任务操作系统。对于多任务操作系统,CPU对内存的访问应该受到限制。而保护模式实现了对指令访问权限和资源访问权限的控制。

特权级
保护模式中,CPU实现了特权级,分0-3共4个等级,R0可以访问所有指令或者资源,其他的只能访问相应的子集:
段描述符
段描述符用来记录段的地址、大小信息以及控制权限,结构如下:
段描述符有64位,保存在GDT表中,其中的DPL字段用来控制内存访问权限。
保护模式下访问内存时,首先通过GDTR寄存器获取GDT表的起始地址和大小,然后再与段寄存器中存放的地址相加得到段描述符的地址:
在这里,段寄存器保存的是段选择子,段选择子结构如下:
这个影子寄存器是靠硬件实现的,在ARM架构中才有,x86是没有的。RPL(Request Priviliege Level 请求指令权限),通常情况下CPL(Current Privilege Level 当前指令权限)等于RPL。在访问内存时,只有CPL<=DPL时才能访问。



这里有个小问题:GDT表大小为64K,也就对应16位地址。但是由于段描述符位64位,所以实际上每个段描述符起始地址的低3位都是0,所以在段选择子中,我们用这低3位来记录TI和RPL。
保护模式下的中断
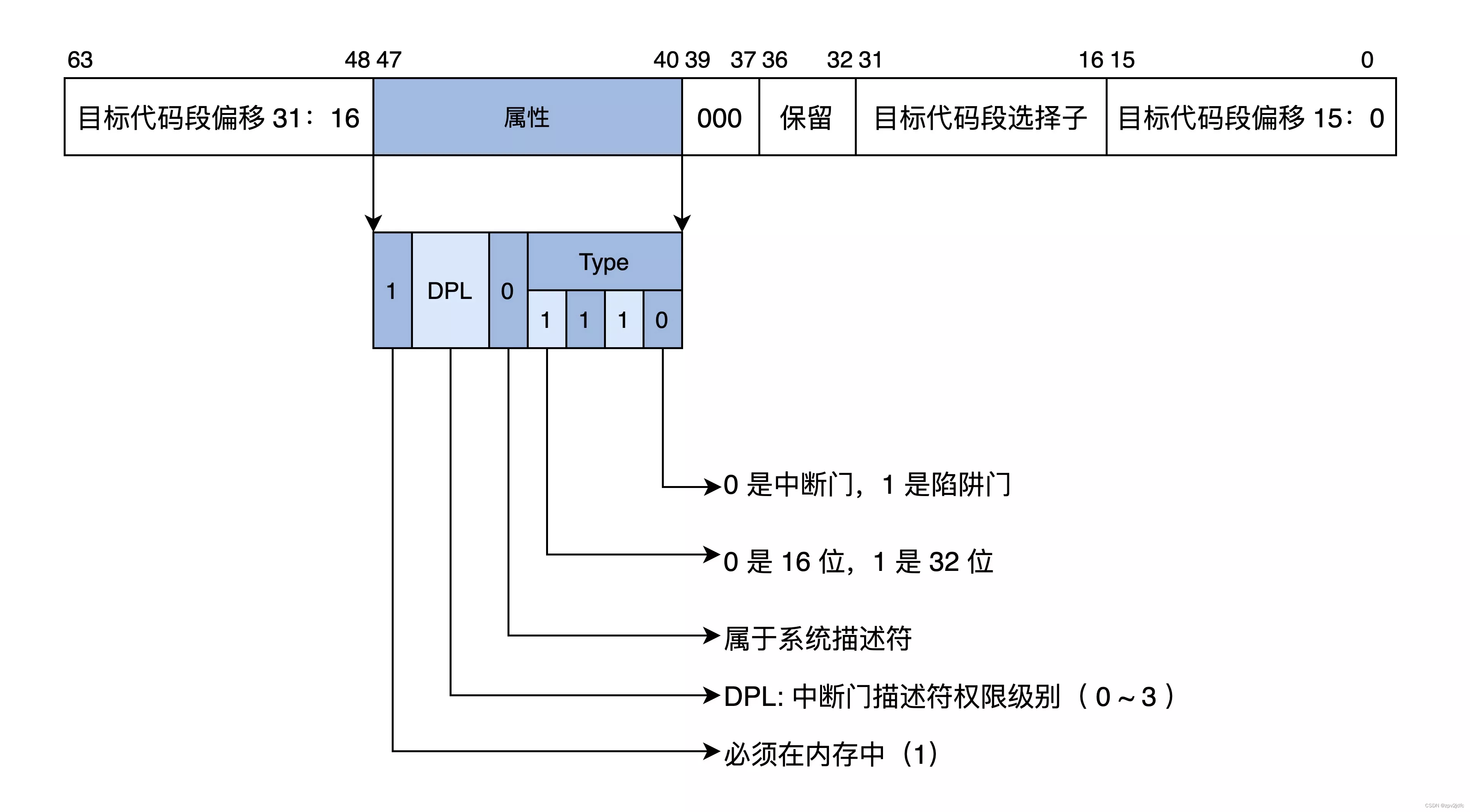
在实模式下,中断向量表中直接存放了段基址和偏移。在保护模式中,为了实现中断权限检查、特权级的转换,在中断向量表中存放中断门描述符,结构如下:
当CPL<=DPL,表示可以进行中断,这是第一步。然后,将CPL与目标段(段选择子指向的段描述符)的DPL对比,如果CPL=DPL,将CPL变为DPL;如果CPL>DPL 除了修改CPL外,还需要进行栈切换。 在做完这些之后,CPU把段选择子加载到CS寄存器,段偏移加载到EIP寄存器中。
保护模式下分页—平坦模式
分段模式缺点很多,但是x86架构并不能直接使用分页模型,平坦模式能够使分段模式形同虚设。
平坦模式是这样实现的:从之前段描述符结构那张图中可以看到,段描述符中有一个标识位G,G为0时表示使用分段模式,G为1时表示段的长度粒度为4KB(相当于页面大小为4KB)。也就是说如果G=1,段基址(base)为1,段限长(limit)为1,那么段的实际地址为0x1000 ~ 0x1FFF。
如果我们把所有的段基址都设置为0,段限长设置为0xFFFFF,那么每个段都指向4G的内存空间,分段模式也就形同虚设了。
与实模式最大段长64KB相比,在保护模式下,段描述符中段基址为32位,段限长为20位,也就说是如果G=0的话,段长最大为1MB。
长模式
长模式和保护模式非常相似,只是有了64位处理能力,其他差别不大。长模式下的寄存器:

总结
实模式、保护模式、长模式对应了处理器从 16位单任务->32位多任务->64位 的发展历史。另外x86CPU在第一次加电时会自动进入实模式,我们需要通过设置CR0寄存器,并且初始化GDT、GDTR等来切换到保护模式或者长模式。
边栏推荐
- Common exception analysis of Redis client
- ipconfig命令指南
- 基于QT的CAN通讯数据实时波形显示(连载八)====“子函数或新类调用ui控件”
- Function functional interface and application
- 十六、Kotlin进阶学习:协程详细学习。
- 边境的悍匪—机器学习实战:第十六章使用RNN和注意力机制进行自然语言处理
- 第一个WebAssembly程序
- 抽象工厂模式(Swift 实现)
- Simulation of Future Air Pollution Changes Based on Global Model Comparison Program CMIP6 and Regional Climate-Chemistry Coupling Model WRF-Chem
- 边境的悍匪—机器学习实战:第八章 降维
猜你喜欢

QT连载1:readyRead()函数,数据分包不完整解决办法

Dropout原理及作用

基于PyTorch深度学习无人机遥感影像目标检测、地物分类及语义分割

十四、Kotlin进阶学习:一、内联函数 inline;二、泛型;三、泛型约束;四、子类与子类型;

Twenty-two, Kotlin advanced learning: simply learn RecyclerView to achieve list display;

探究make_shared效率

遥感、GIS和GPS技术在水文、气象、灾害、生态、环境及卫生等应用

Knowledge distillation method of target detection

昆仑通态屏幕制作(连载3)---基础篇(按钮串口发送)

边境的悍匪—机器学习实战:第十二章 使用TensorFlow自定义模型和训练
随机推荐
用户密码加密编码使用 Bcrypt 代替 MD5,SHA1和SHA256
Use kotlin to extend plugins/dependencies to simplify code (after the latest version 4.0, this plugin has been deprecated, so please choose to learn, mainly to understand.)
【Qingdao Station】High-level application of SWAT model and modeling of areas without data, uncertainty analysis and climate change, improvement of land use surface pollution impact model and case analy
十二、Kotlin进阶学习:一、Lambda 表达式;二、高阶函数;
Generalized Focal Loss paper reading notes
九、Kotlin基础学习:1、Companion的扩展方法和扩展属性;2、一般类的扩展方法和扩展属性;3、委托;
Student achievement management system (C language version)
基于MATLAB 2021b的机器学习、深度学习
21. Kotlin Advanced Learning: Implementing Simple Network Access Encapsulation
基于R语言地理加权回归、主成分分析、判别分析等空间异质性数据分析
边境的悍匪—机器学习实战:第十三章 使用TensorFlow加载和预处理数据
边境的悍匪—机器学习实战:第十二章 使用TensorFlow自定义模型和训练
2021年软考中级过关
十四、Kotlin进阶学习:一、内联函数 inline;二、泛型;三、泛型约束;四、子类与子类型;
边境的悍匪—机器学习实战:第一章 机器学习的基础知识
边境的悍匪—机器学习实战:第七章 集成学习和随机森林
ipconfig命令指南
【总结】工业检测项目中如何选择合适的损失函数
Rsync实现Win系统间的文件夹或数据同步
The application of Meta analysis in the field of ecological environment