当前位置:网站首页>遥感影像识别-成像合成
遥感影像识别-成像合成
2022-07-27 05:21:00 【122&&113】
效果
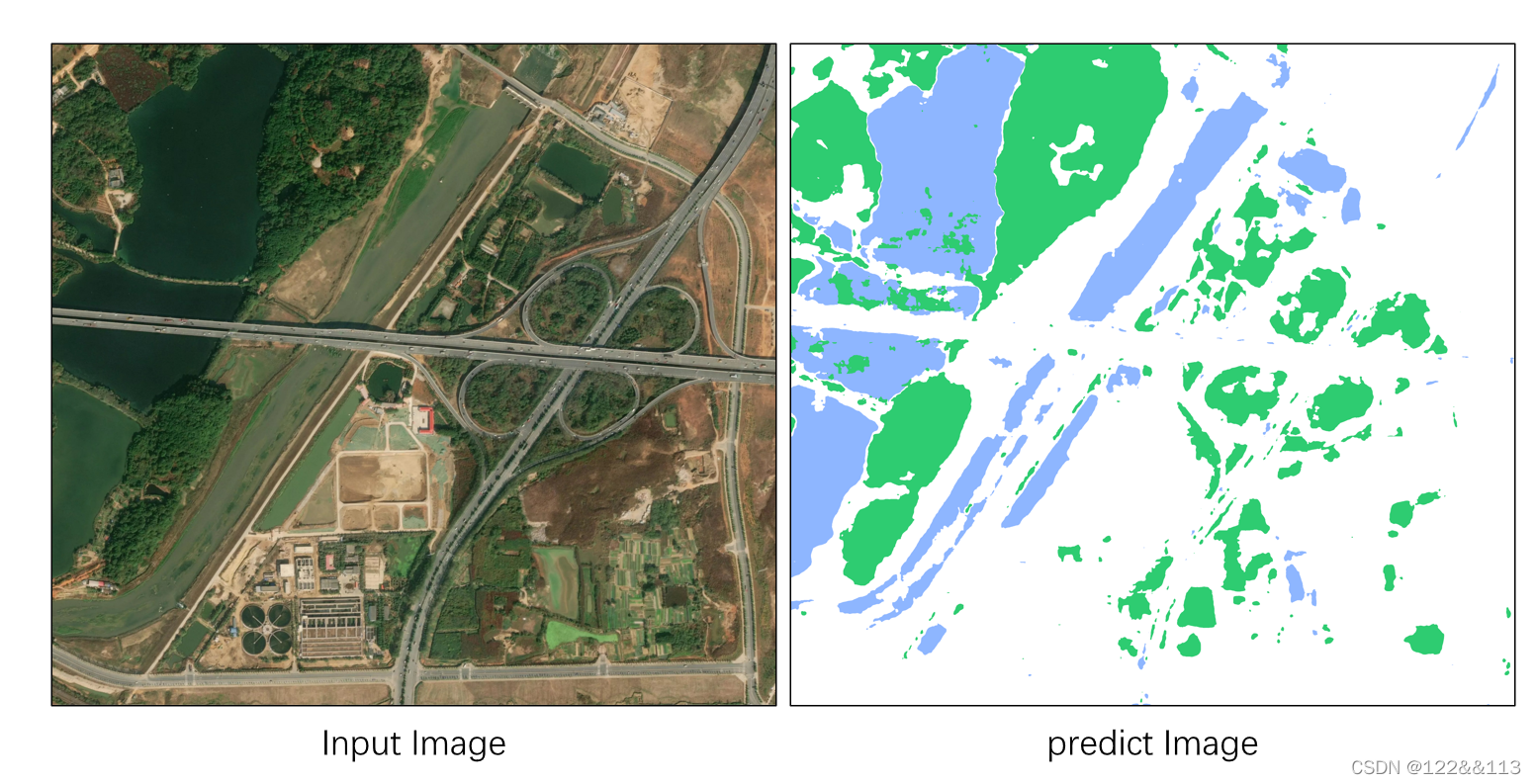
由于之前训练采用的数据集是从城市中采样,因此造成模型对乡村地区的识别效果特别差,因此由手工制作了十几张乡村地区的数据集,其中标注了两个类别,分别为水域、林地。然后用这个数据集去训练模型。
以下是在新训练的模型上两个采样区域的识别效果:
- 城市:
- 乡村

合成
由于识别是针对多个类别的,因此需要将之前训练的模型和当前模型识别出来的图像进行合成,最终实现对水域、建筑物、道路、林地的识别。

WF : 表示能够识别出水域、林地
RAW : 表示能够识别出道路、建筑物、水域
将两张图像合成后的效果如下:
之前有想法是把每个像素点预测的概率输出到图像的alpha通道,然后在合成的时候用来比较概率来判断将像素分到哪一个类别,以下就是效果图: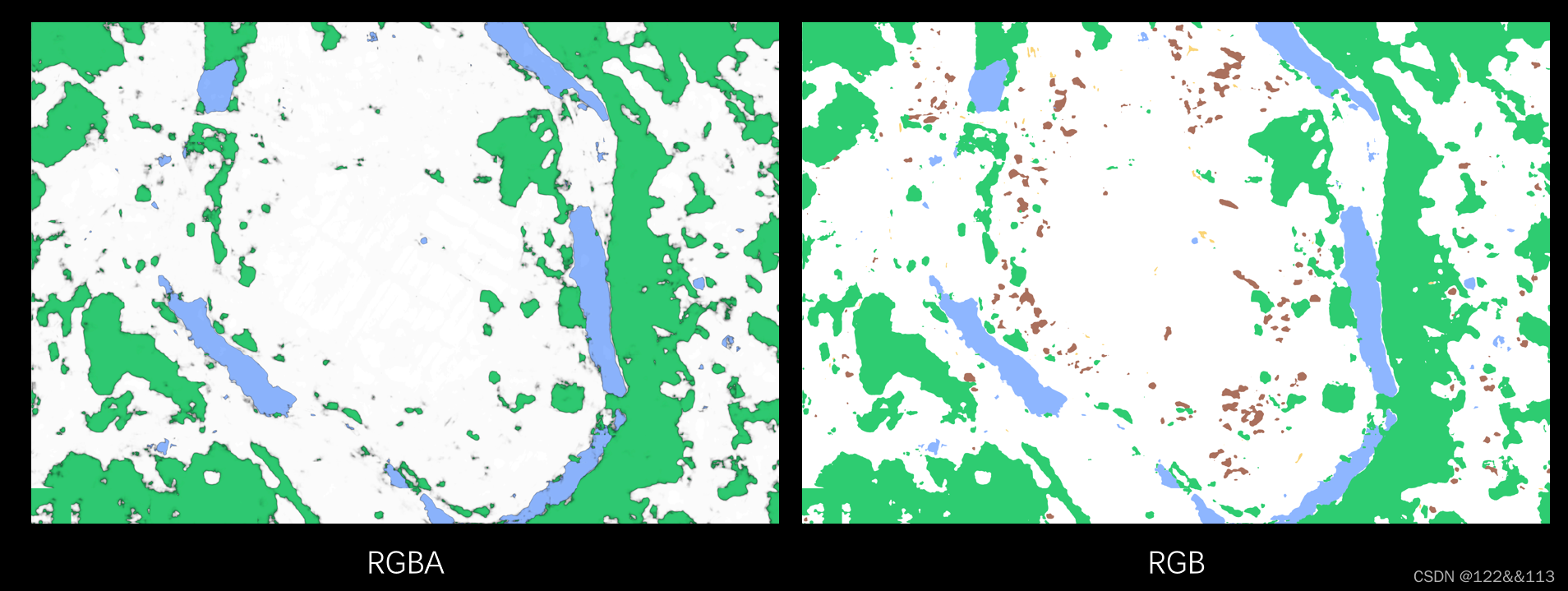
可以看到左边着色区域的边界颜色会更深一些,因为此时概率代表了图像的透明程度,不过这只是用来存储每个类别的概率。
做到上述这一步后,发现如果只是去比较概率,那么只能去比较水域与林地两类的概率,由于模型训练的数据集不同,识别类别的个数也不同,因此从这两类的效果来说,新训练的模型效果要好于之前的模型,因此最终还是直接将水域、林地这两类用新训练的模型识别出来的结果覆盖了原来的识别结果。
下一步的想法
将城市里的绿地部分使用人工标注,然后再将乡村地区的道路以及建筑物标注出来,投入训练,看效果如何。此外利用更加丰富的数据增强方式,之前只用到了旋转、噪声,但是还有云雾之类的并未考虑进去,因此利用现有训练的模型去预测之前的一张图依然会有错误。
左图中的白线是自己加的,主要用来表示白线围住的区域云雾影响就比较大。
边栏推荐
- 安装windows下的redis
- Lightroom Classic 2022 v11.4中文版「最新资源」
- acwing每日一题 正方形数组的数目
- AE 3D particle system plug-in: Trapcode particle
- Baiwen driving Daquan learning (II) I2C driving
- 百问网驱动大全学习(一)LCD驱动
- STM32 infrared remote control
- Greedy high performance neural network and AI chip application research and training
- 力扣 110. 平衡二叉树
- [first song] rebirth of me in py introductory training (4): Circular program
猜你喜欢









随机推荐
百问网驱动大全学习(二)I2C驱动
论文报告-Linear Regression for face recognition
C语言-程序的编译
Can it replace PS's drawing software?
Live Home 3D Pro室内家居设计工具
【头歌】重生之我在py入门实训中(4):循环程序
WebODM win10安装教程(亲测)
Baiwen driver Daquan learning (I) LCD driver
Weidongshan digital photo frame project learning (I) display ASCII characters on LCD
IOT operating system
[Arduino] reborn Arduino monk (1)
C language - linear sequence table
Live Home 3D Pro interior home design tool
文件的路径
Leetcode one question per day 30. Concatenate substrings of all words
Gbase 8C - SQL reference 6 SQL syntax (14)
力扣题解 动态规划(7)
韦东山 数码相框 项目学习(二)在LCD上显示中文字符
物联网操作系统
[song] rebirth of me in py introductory training (8): module