当前位置:网站首页>Aloam code reading and summary
Aloam code reading and summary
2022-07-02 17:53:00 【xiaoma_ bk】
List of articles
Aloam
A-LOAMyesLOAMAdvanced implementation of , It USES Eigen and Ceres Solver To simplify the code structure . This code is created byLOAMandLOAM_NOTEATo modify . This code is simple and clear , There is no complex mathematical derivation and redundant operation . about SLAM It is a good learning material for beginners .Node diagram :
KITTI Example
- download KITTI Odometry dataset Data set to Your dataset folder , Set up
dataset_folderandsequence_numberParameters . - Please note that , You can also use the
kitti_helper.launchSet appropriate parameters in to KITTI Data sets are converted to package files for ease of use .
- download KITTI Odometry dataset Data set to Your dataset folder , Set up

Summary
advantage :
- The code is indeed much simpler , If there is loam The foundation is looking at this , It's really clear at a glance .
Suggest :
When calculating curvature , Between every line shift Not taken into account , But it doesn't affect , Because how many starting points of each line are skipped when extracting features
When filtering features based on curvature , Because the point cloud has been ordered based on curvature
- Corner point :if The curvature should be greater than 0.1 establish , Otherwise directly break Is it not good? , Do not waste time after traversing
- Plane point :if The curvature should be less than 0.1 establish , Otherwise directly break Is it not good? , Do not waste time after traversing
Make sure when you get close Straight line and plane I don't feel it lio-sam Medium and high precision
ceres Optimize , How about a manual derivation
rosbag read_write
- Reading and writing rosbag be used bag class , See the following example for specific use :
// Define read / write objects , And declare that
rosbag::Bag i_bag, o_bag;
i_bag.open(src_bag, rosbag::bagmode::Read);
o_bag.open(new_bag, rosbag::bagmode::Write);
// Define an array
std::vector<std::string> topics;
topics.push_back(std::string(imu_topic));
topics.push_back(std::string(pcd_topic));
// Affirming rosbag::View object
rosbag::View view(i_bag, rosbag::TopicQuery(topics));
///< Read method 1 :
for (auto m : view) {
// Traverse view
sensor_msgs::Imu::ConstPtr imu = m.instantiate<sensor_msgs::Imu>();
if (imu == nullptr) {
// Is there a imu
std::cerr << "imu null " << std::endl;
} else {
std::cout << "imu stamp:" << imu->header.stamp << std::endl;
o_bag.write(imu_topic, imu->header.stamp, imu);
}
sensor_msgs::PointCloud2::ConstPtr pcd =
m.instantiate<sensor_msgs::PointCloud2>();
if (pcd == nullptr) {
std::cerr << "pcd null " << std::endl;
} else {
std::cout << "pcd stamp:" << pcd->header.stamp << std::endl;
o_bag.write(pcd2_topic, pcd->header.stamp, pcd);
}
}
///< Read method 2 :
rosbag::View view(bag);
for (const rosbag::ConnectionInfo* c : view.getConnections()) {
const std::string& topic = c->topic;
if (topic_to_publisher.count(topic) == 0) {
ros::AdvertiseOptions options(c->topic, kQueueSize, c->md5sum,
c->datatype, c->msg_def);
topic_to_publisher[topic] = node_handle.advertise(options);
}
}
scanRegistration
The main function :
- Ros node
- ros Node initialization
scanRegistration - Read parameters :
scan_line、minimum_range
- ros Node initialization
- Only support 16,32,64 Linear velodyne, If not return
- Subscribe to the topic :
/velodyne_pointslaserCloudHandler
- Post topics :
sensor_msgs::PointCloud2>("/velodyne_cloud_2", 100);sensor_msgs::PointCloud2>("/laser_cloud_sharp", 100);sensor_msgs::PointCloud2>("/laser_cloud_less_sharp", 100);sensor_msgs::PointCloud2>("/laser_cloud_flat", 100);sensor_msgs::PointCloud2>("/laser_cloud_less_flat", 100);sensor_msgs::PointCloud2>("/laser_remove_points", 100);
- Based on parameters Determine whether to publish each line Normal does not execute
laserCloudHandler
- The last system initialization , Is simply how many frames to skip
- Point cloud rotation pcl Format ,pcl::removeNaNFromPointCloud
- Remove the nearest point ,removeClosedPointCloud
- Traverse each point , seek Point to Laser distance , If the distance is less than the threshold , be continue
- Otherwise, put the point into a new container
- Starting angle calculation :
- Starting angle :startOri = -atan2(pointp[0].y,pointp[0].x)
- End angle :endOri = -atan2(pointp[size-1].y,pointp[size-1].x)+2π
- if endOri-startOri > 3π endOri -= 2π
- if endOri-startOri < 3π endOri += 2π
- Calculation scanID + relTime
- scanID Which line , Good calculation
- relTime Time difference from the initial point Calculate the horizontal angle with the initial point * cycle / Total angle
- Calculate the curvature of each point
- Follow loam The calculation is the same
- Between every line shift Not taken into account , But it doesn't affect , Because how many starting points of each line are skipped when extracting features
- Traverse Multi line
N_SCANS, For each line , Divide the point cloud into 6 Share :- Calculate the starting subscript of each copy : sp,ep
- Sort each point cloud according to the curvature from small to large
std::sortfunction - Corner finding , Reverse traversal of ordered point clouds
- If the curvature is greater than 0.1 And The surrounding points can be feature points when :
- Find the one with the largest curvature 2 Point in
cornerPointsSharpPoint cloud markers :2 - Find curvature maximal 20 Put in
cornerPointsLessSharpPoint cloud markers :1 - If the point is marked as a characteristic point , The surrounding 5 A point cannot be a feature point
- Find the one with the largest curvature 2 Point in
- If the curvature is greater than 0.1 And The surrounding points can be feature points when :
- Find a flat point , Traverse the ordered point cloud forward
- If the curvature is less than 0.1 And The surrounding points can be feature points when :
- Find the one with the largest curvature 4 Point in
surfPointsFlatPoint cloud markers :-1 - If the point is marked as a characteristic point , The surrounding 5 A point cannot be a feature point
- Find the one with the largest curvature 4 Point in
- If the curvature is less than 0.1 And The surrounding points can be feature points when :
- if Marked as -1 Put in
surfPointsLessFlatScan
laserOdometry
The main function :
- Ros node
- ros Node initialization
laserOdometry - Read parameters :
mapping_skip_frameDefault 2
- ros Node initialization
- Subscribe to the topic :
/velodyne_cloud_2laserCloudFullResHandler- This point cloud goes to the nearest point and nan Of
- This callback is also relatively simple , take Put the data in the queue
- Four characteristics , Corner point , Corner point less, Plane point , Plane point less
- These four callbacks are relatively simple , Just put the data in the queue
- Release :
- Corner point and Plane point
velodyne_cloud_3laser_odom_to_initlaser_odom_path
- while The main thread ,ros::spin0nce,100hz
- above 5 All kinds of data arrive And Take the first data when the time is the same
- When 5 All kinds of data arrive , The time must be the same , atypism ros Report errors
- 5 Kind of data pcl Data conversion
- if systemInited== flase when :
- Direct assignment systemInited=true
- otherwise , Optimize twice , Do the following for each time :
- The optimization variable is Postures para_q,para_t,4+3 A degree of freedom
- Traverse corner features :
- Convert corners to odometer coordinate system ,TransformToStart
- adopt kdTree find A straight line
- adopt kdTree Find the nearest corner subscript in the previous frame
pointSearchInd - This point subscript Up and down range The nearest point in is Another point
- Two points form a straight line
- adopt kdTree Find the nearest corner subscript in the previous frame
- adopt LidarEdgeFactor structure ceres Direct constraint
- And add residuals
- Traverse planar features :
- Convert the plane point to the odometer coordinate system ,TransformToStart
- adopt kdTree find Plane
- adopt kdTree Find the nearest corner subscript in the previous frame
pointSearchInd - This point subscript Up and down range The nearest point in is Another point
- same ring in Stretch forward Planar features as The third point
- adopt kdTree Find the nearest corner subscript in the previous frame
- adopt LidarPlaneFactor structure ceres Direct constraint
- And add residuals
- Build solver : iteration 4 Time ,QR decompose , Get the solution
- to update
q_w_currandt_w_curr - to update On a frame Corner points and plane points kdTree
- above 5 All kinds of data arrive And Take the first data when the time is the same
TransformToStart
- The relationship between the last odometer coordinate system is recorded , Directly convert according to the last relationship
- The idea that The initial value of the current frame is the same as that of the previous frame , Easy to calculate
LidarEdgeFactor
- The distance between a point and a line , Automatic derivation
LidarPlaneFactor
- Point to the distance of peace , Automatic derivation
laserMapping
The main function :
- ros Node initialization
- Define the node
laserMapping - Read parameters :
mapping_line_resolution0.4mapping_plane_resolution0.8
- Define the node
- Subscribe to the topic :
/laser_cloud_corner_lastlaserCloudCornerLastHandler/laser_cloud_surf_lastlaserCloudSurfLastHandler/laser_odom_to_initlaserOdometryHandler/velodyne_cloud_3laserCloudFullResHandler
- Post topics :
- The main thread mapping_process process
callback
- 3 Each laser callback puts the data into its own queue , There are mutually exclusive locks
- Laser odometer callback in addition to putting the data into the queue , It also sends data from the world coordinate system based on odometer drift
process
while 1 loop ,2s Do it once
- Data synchronization , Translates into pcl Format
- if 3 Point cloud data and When odometer data is not empty :
- If a certain kind of comparison
cornerLastBuf.front()Data early , be pop
- If a certain kind of comparison
- Take the first data of each data , should The time of these four kinds of data is consistent
- Sent by the same node , And the timestamp of the four kinds of data is the same
- take 3 Kind of point cloud data through pcl Convert to respective objects , And from the queue pop_front
- if
cornerLastBufWhen is not empty , pop Its data , Real time
- if 3 Point cloud data and When odometer data is not empty :
- Get the pose of the current frame in the world coordinate system transformAssociateToMap()
- L W T = O W T ∗ L O T { _L^WT=_O^WT*_L^OT} LWT=OWT∗LOT
- 1、 Optimize processing Find the current estimate lidar Which posture belongs to cube,I/J/K Corresponding cube The index of
- cube Central location index ,50m The resolution of the , Initial value [10,10,5]
- 2、 If the current frame lidar The posture corresponds to cube In the whole big cube The edge moves the index one unit towards the center
- width Direction :centerCubeI and The central position index changes accordingly
- centerCubeI stay width Small end of direction , Frame cube The pointer moves towards the center , namely i = i-1
- centerCubeI stay width The big end of the direction , Frame cube The pointer moves towards the center , namely i = i+1
- height Direction :centerCubeJ and The central position index changes accordingly
- centerCubeJ stay height Small end of direction , Frame cube The pointer moves towards the center , namely i = i-1
- centerCubeJ stay height The big end of the direction , Frame cube The pointer moves towards the center , namely i = i+1
- depth Direction :centerCubeK and The central position index changes accordingly
- centerCubeK stay depth Small end of direction , Frame cube The pointer moves towards the center , namely i = i-1
- centerCubeK stay depth The big end of the direction , Frame cube The pointer moves towards the center , namely i = i+1
- width Direction :centerCubeI and The central position index changes accordingly
- 3、 take centerCube The surrounding point cloud is composed Local map
- At present centerCube Of Expand in three directions 2 Each of them Valid array
- take centerCube Surrounding valid arrays Corner point 、 The point cloud of the plane point atlas wants to add up
- 4、 The current frame Corner point and Plane point feature Down sampling
- 5、 Get the pose matching the current frame with the map
- If meet The number of corner maps is greater than 10 And The number of points in the plane point map is greater than 50, To perform
- take Map point cloud Put in kdtree Easy to find
- Iterate twice solve :
- Traverse the current frame Corner features , structure ceres error model
- Turn the current corner to the world coordinate system , And look for 5 A recent point
- if 5 All points are less than 1m when
- obtain 5 The covariance of points , And calculate its eigenvalue and eigenvector
- If it is indeed a line feature , Build line feature model ( Note that the feature library sorts the feature values in ascending order )
- Traverse the current frame Pastry features , structure ceres error model
- Go to the world coordinate system , And look for 5 A recent point
- if 5 All points are less than 1m when , structure 5 Equation of points : ax+by+c=1
- If plane 5 The distance from each point to the plane is less than 0.2m, Prove that the plane holds , Build a face feature model
- Build a face feature model
- solve obtain Matching results
- Traverse the current frame Corner features , structure ceres error model
- 6、 After optimization , Update data
- Update the pose
- Update the corner in the current frame stay cube, And add the map
- Update the current frame Plane point stay cubeI, And put it into the map
- 7、 Voxel filter the map Downsampling
- 8、 Publish corresponding data
边栏推荐
- Modbus protocol communication exception
- MB10M-ASEMI整流桥MB10M
- HDU - 1114 Piggy-Bank(完全背包)
- 【网络是怎样连接的】第六章 请求到达服务器以及响应给客户端(完结)
- Development and application case of pms134 scheme of Yingguang single chip microcomputer with original packaging
- POJ - 1458 Common Subsequence(最长公共子序列)
- 把xshell連接服務器關掉,運行的jar包就自動停止的解决方案
- POJ - 1458 common subsequence (longest common subsequence)
- 515. 在每个树行中找最大值
- 第十五章 字符串本地化和消息字典(一)
猜你喜欢
Does pytorch support 32 bits?
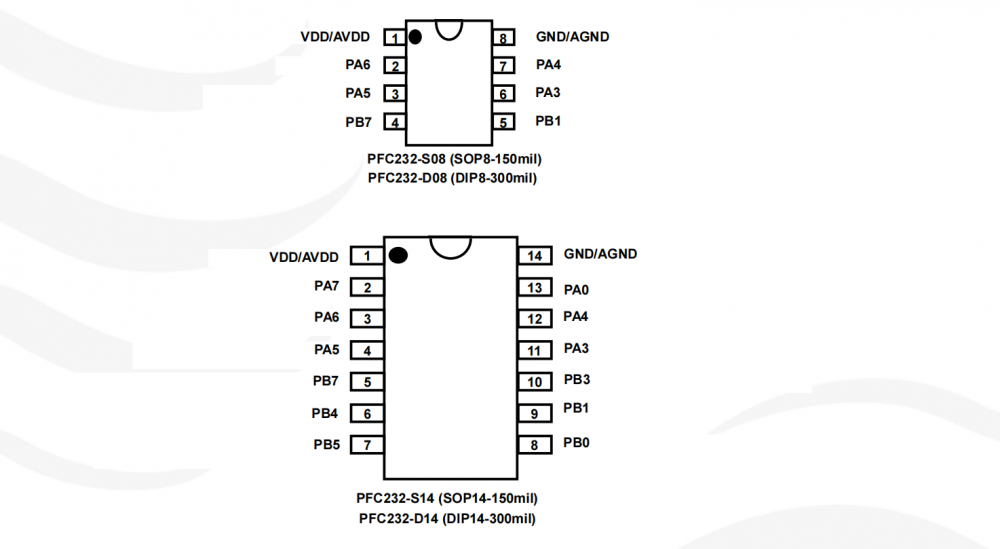
PFC232-SOP8/14/16应广一级可带烧录程序编带
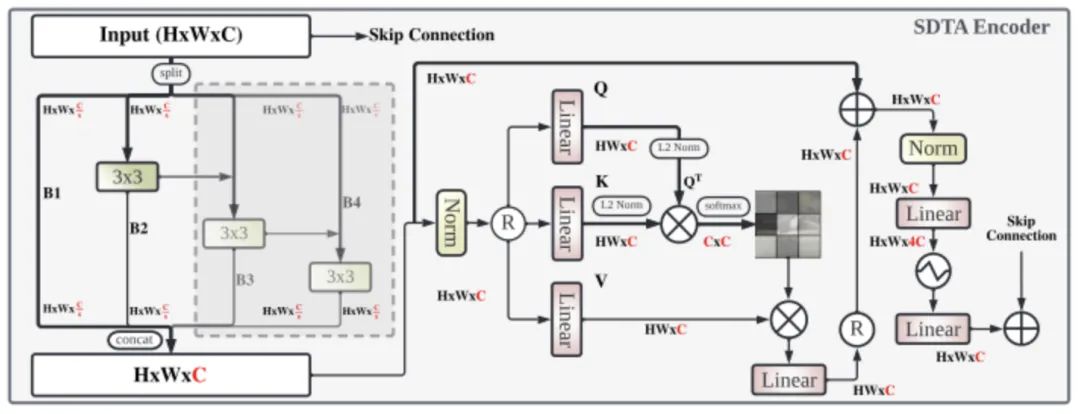
EdgeNeXt打出了一套混合拳:集CNN与Transformer于一体的轻量级架构

维护万星开源向量数据库是什么体验

Map集合详细讲解

HBuilderX运行到手机或模拟器提示没有找到设备

Chrome browser quick access stackoverflow

深入理解ThreadLocal

Daily question - xiaolele changes the number

【曆史上的今天】7 月 2 日:BitTorrent 問世;商業系統 Linspire 被收購;索尼部署 PlayStation Now
随机推荐
好评率计算
android之循环定时器实现,实现定Android时缓存清理
台湾飞凌FM8PB513B单片机提供单片机方案开发 产品设计
能解决 80% 故障的排查思路
[today in history] July 2: BitTorrent came out; The commercial system linspire was acquired; Sony deploys Playstation now
详解Kubernetes网络模型
uva1169
Turn off the xshell connection server and the running jar package will stop automatically
Laravel文档阅读笔记-Custom Authentication Login And Registration Using Laravel 8
Many scenic spots are temporarily closed due to the typhoon. The provincial culture and tourism department reminds you to pay attention to safety!
uva1169
Modbus protocol communication exception
Yingguang pmc131 SOP16 16pin eight bit MCU
win10 kms activator
Edgenext hit a mixed punch: a lightweight architecture integrating CNN and transformer
JDBC
Mb10m-asemi rectifier bridge mb10m
Yilong em78p153k dip14 MCU
【网络是怎样连接的】第五章 探索服务器
Wasserstein Slim GAIN with Clipping Penalty(WSGAIN-CP)介绍及代码实现——基于生成对抗网络的缺失数据填补