当前位置:网站首页>lvi-sam 总结
lvi-sam 总结
2022-06-27 09:44:00 【xiaoma_bk】
Lvi-sam
lidar-visual-inertial odometry and mapping system
- 总体框架示意图:
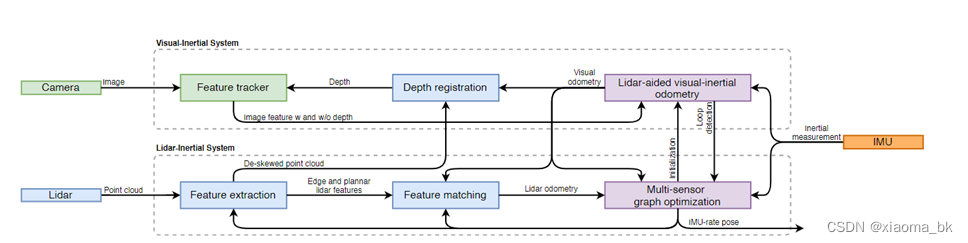
- 各个节点 数据传输示意图

vins
visual_feature
主函数:
初始化Ros节点
设置Log等级
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Warn);读取参数 每个节点都读取一遍,好费劲
读取相机参数 N个相机参数单独读取
- 如果有鱼眼相机时,读取鱼眼mask
初始化深度寄存器(在读取参数后) DepthRegister
订阅 激光和图像 话题,若不适用激光时,
sub_lidar.shutdown();- img_callback
- lidar_callback (去过畸变的点云)
发布topic:
- feature,restart(视觉里程计用)、feature_img(rviz)
两个线程,
MultiThreadedSpinner, 用于并行处理(图像和激光雷达)
lidar_callback
1、跳帧,
++lidar_count % (LIDAR_SKIP+1) != 02、得到 vins_world 到 body的转换关系transNow
- tf listen 读取失败时 return
- 转换为
Eigen::Affine3f
3、点云数据处理
- laser cloud 转换为 pcl
- 降采样 (0.2,0.2,0.2)
- 点云滤波(仅在相机视图中保留点)
x>=0&&y/x<=10&&z/x<=10 - 由激光坐标系转换为 相机坐标系
pcl::transformPointCloud - 转换到全局里程计坐标系,使用了 tf接听的transNow
4、保存点云队列 点云+time 两个队列 cloudQueue、timeQueue
5、弹出队列中老的数据,保留5s数据
6、融合队列中的点云数据
depthCloud,即将队列中所有点云数据相加7、融合后的点云数据降采样,(0.2,0.2,0.2)
img_callback
- 若 first_image_flage 时,赋值
first_image_time、last_image_time返回 - 相机数据流稳定性检测,时间间隔>1s 或者 时间回跳
- 异常时,发送 restart标志,并return
- 发布当前帧频率控制
PUB_THIS_FRAME,发布时 ++pub_countround(1.0 * pub_count / (cur_img_time - first_image_time)) <= FREQ- 重置 pub_count ,first_image_time
- image数据转换为cv::Mat,并trackerData[i].readImage,核心:readImage
PUB_THIS_FRAME时,发布topic,pub_feature,注:depthRegister->get_depth
readImage
直方图均衡化,参数:
cv::createCLAHE(3.0, cv::Size(8, 8)若 forw_img是空, 则
prev_img = cur_img = forw_img = img;若
cur_pts.size() > 0时,光流跟踪,当前跟踪特征点forw_pts- 光流跟踪
cv::calcOpticalFlowPyrLK - 删除 无效的特征点
- 光流跟踪
若发布 该帧时
- 设置Mask,非极大值抑制
- 若 该帧特征点个数小于预设最大值时,进行额外提取
cv::goodFeaturesToTrack - 并添加额外增加的点
赋值,并去畸变 undistortedPoints
cv::undistortPoints不过使用相机模型中:m_camera->liftProjective- 若有上一帧有匹配点时,进行速度预测
get_depth
初始化深度 通道,为返回做准备
name = "depth",values.resize(features_2d.size(), -1)
若无深度点云时,直接返回了,深度点云由
lidar_callback得到得到当前时间段 body到世界坐标系的位姿
transNow将点云从 世界坐标系转换到相机坐标系
transNow.inverse()将特征点投影到单位球面上,z 总是为1 features_3d_sphere
- 转换到ros标准坐标系,x = z, y =-x,z=-y
- 标准:前x,左y,上z,相机:前z,右x,下y
- 强度用来存储深度,赋值 -1
定义求取深度的图片(-90°,90°),分辨率 bin_res =180/360
遍历所有的深度点,计算raw_id,col_id,若在图像范围内,仅保留最近的点
row_angle =atan2(p.z, sqrt(p.x * p.x + p.y * p.y)) * 180.0 / M_PI + 90.0- 为了转换到 [0,180],故需要加90°
col_angle = atan2(p.x, p.y) * 180.0 / M_PI;- row_id = row_angle / bin_res,col_id=col_angle/bin_res。
- 若已经更新时,只取最近的
depth_cloud_local赋值,发布深度到vins_body_ros坐标系
将深度点云图 depth_cloud_local进行归一化,得到 depth_cloud_unit_sphere
- x,y,z/range ,强度保存了深度值,
通过归一化深度图 depth_cloud_unit_sphere,创建 kd_tree
遍历 归一化特征点features_3d_sphere,得到各个点的深度
- 在 kd_tree中找到3个临近的点,阈值5个像素的平方
- 可以找到3个且距离小于阈值时,做如下操作:
- 取3个点数据:A、B、C, 每个点的三维坐标(归一化坐标*深度)和深度r
- 归一化特征点 V V V(归一化坐标)
- 计算ABC确定的法向量 N N N
- 计算原点到 平面的距离
(N(0) * A(0) + N(1) * A(1) + N(2) * A(2)) - 计算原点到 归一化特征点与法向量 N N N确定的平面的距离
(N(0) * V(0) + N(1) * V(1) + N(2) * V(2)) - 得到 归一化特征点的深度 s = 上述二者相除
- 若 3个点的深度相差2m 或 深度小于 0.5m时,s不变
- s若深度大于3个点的最大深度,则赋最大深度,若小于最小深度时赋值最小深度
- 还原特征的3d信息 (归一化数据乘以深度值) features_3d_sphere,
若发布深度图,则赋值不同颜色显示,并发布
跟新各个特征的深度点depth_of_point,并返回
visual_odometry
主函数:
- 构造
Estimator estimator全局变量 - 初始化 ros
- 读取参数,并
estimator.setParameter()- 相机外参,td,信息矩阵
- 订阅
restart_callback- imu_callback
- odom_callback
- feature_back
- 若不使用 激光时
sub_odom.shutdown(); - 定义主线程 measurement_process{process};
- 两个线程,
MultiThreadedSpinner, 用于并行处理
imu_callback
- 若imu 数据 时间回跳或不变时,直接 打印警告并return
- 将imu数据push 到 imu_buf 中,互斥锁
m_buf - 条件唤醒主线程
- 发布 最近的里程计,用于rviz显示
odom_callback
- 将数据放入 odomQueue 中,互斥锁
m_odom
feature_callback
- 将数据放入 feature_buf 中,互斥锁
m_buf - 条件唤醒主线程
process main_thread
- while ros::ok
- 条件唤醒
measurements !=0- measurements =getMeasurements
- 遍历
measurements- imu 预积分
- imu_msg.time <= img_msg.time
estimator.processIMU - 否则,基于上次线加速度和角加速度 使得二者完全对齐
- imu_msg.time <= img_msg.time
- image[feature_id]构造
- imu 预积分
- 从激光雷达里程计获取初始化信息 odomRegister->getOdometry
- 由于用到odometry数据,因此 互斥锁
m_odom
- 由于用到odometry数据,因此 互斥锁
- 处理图像 processImage
- 可视化
- 发布里程计,关键帧Pose,相机Pose,发布Tf,发布关键帧
- 条件唤醒
other_function
getMeasurements
- while 1循环
- imu_buf 和 feature_buf 有一个为空时 return
- imu_buf.back未包含 feature_buf.fornt 时间时,return
- imu_buf结束时间未包含要打包的 feature数据,跳过
- imu_buf.front 未包含 feature_buf.fornt 时间时,feature_buf弹出,continue
- imu_buf起始时间未包含feature数据时,将其弹出
- 因为数据时间是递增的,永远不会包含,扔掉
- 打包 imu_buf小于 feaure_buf.font的数据,即:[Imus,feaure_buf.font]
getOdometry
重置 odometry_channel(18,-1)
- id(1), P(3), Q(4), V(3), Ba(3), Bg(3), gravity(1)
激光里程计部位空时,丢掉里程计较老的帧,
odom<img_time-0.05? pop_fornt激光里程计为空时,直接返回
得到 最接近的 q_odom_lidar
- 找到最接近图像时间的里程计
odomCur,小于图像视觉的最近里程计帧 - 若里程计
odomCur与img时间间隔大于 0.05,直接return
- 找到最接近图像时间的里程计
将其转换到 激光坐标系 q_odom_cam
转换 里程计位姿从激光坐标系到 相机坐标系
odomCur转换为 p_eigen,v_eigen- p_eigen,v_eigen = q_lidar_to_cam_eigen* p_eigen,v_eigen
- p_eigen,v_eigen 转换为
odomCur
返回 odometry_channel,由
odomCur转换而来
processImage
- addFeatureCheckParallax 添加特征到feature,并计算跟踪的次数和视差,评判出是否为关键帧
- 若为关键帧,边缘化老帧;否则边缘化新帧
- 如果有有激光里程计且初始化有效时,边缘化老帧
- 将该帧添加到 all_image_frame中,并重新开始预积分
- 若需标定外参时,进行旋转外参标定 CalibrationExRotation 标定成功后改变状态
- 若系统为初始化状态时:
- 若滑窗内帧个数不足预设值时,push帧
- 进行初始化 initialStructure
- 初始化成功后,状态为非线性优化,并进行
- 求解里程计 solveOdometry
- 移动滑窗 slideWindow
- 移除为跟踪的特征点 f_manager.removeFailures()
- 赋值
- 否则:移动滑窗 slideWindow
- 否则系统费初始化状态:
- 求解里程计 solveOdometry
- 若求取失败,则重启 vins 系统
- 移动滑窗 slideWindow
- 移除为跟踪的特征点 f_manager.removeFailures()
- 赋值滑窗,准备VINS的输出
initialStructure
- 激光初始化
- 清除容器中的关键帧
- 遍历容器中的所有帧,is_key_frame=false
- 检测 窗口内的激光信息是否有效,无效时break
- 若窗口内激光信息有效时:
- 更新滑窗内的状态
- 更新重力方向
- 重置所有特征的深度,并进行三角化 triangulate
- 若该点特征深度有效时,则跳过三角化
- 返回true
- 清除容器中的关键帧
- 检测imu 的可观性
- 计算 帧间imu预积分 的加速度 (delta_v/dt)
- 计算 imu预积分 的加速度标准差钱
- 若标准差小于 0.25,则返回(已注销该句)
- 全局 sfm
- 遍历 所有特征点,添加观测约束 imu_j
- 遍历imu_j++,为该特征添加所有约束
- 足够的视差恢复 R,t relativePose
- 纯视觉恢复 滑窗位姿及特征 construct
- 遍历 所有特征点,添加观测约束 imu_j
- Pnp 求解所有帧
- 视觉Imu 对齐
triangulate
- 特征三角化,与原不同的是若该特征有深度时,直接跳过
visual_loop
主函数:
ros初始化,初始化节点+句柄+log等级显示
加载参数
- 评判参数路径是否正确
- 闭环所用到的参数 yaml
如果 需闭环:参数设置
- 初始化词袋
- 初始化 brief 提取
- 初始化相机模型
订阅话题:
- image_call
- 视觉里程计的关键帧 位姿 pose_callback
- 视觉里程计的关键帧 特征点 point_callback
- 视觉里程计的估计外参 extrinsic_callback
发布话题:
- 闭环匹配图片 pub_match_img
- 闭环匹配frame pub_match_msg
- 闭环关键帧位姿 pub_key_pose
若无闭环时,上述订阅发布话题都 shutdown
构建主线程 std::thread(process);
callback
- 回调函数就是将数据放入 buf中
pose_callback
- 无闭环时,直接return
- 将数据放入 pose_buf,互斥锁
m_buf
point_callback
- 无闭环时,直接return
- 将数据放入 point_buf,互斥锁
m_buf
image_callback
- 无闭环时,直接return
- 将数据放入 image_buf,互斥锁
m_buf - 检测 相机数据流的稳定性
- 检测图片 时间间隔和回跳
- 间隔>1s 或回跳时,所有队列都情况
extrinsic_callback
- 无闭环时,直接return
- 赋值 tic, qic,互斥锁
m_process
Process
无闭环时,直接return
while ok
- 数据对齐
- 找到 image_msg、pose_msg、point_msg
- 三者时间一致,且互斥锁
m_buf
- 若 pose_msg != Null 时,即赋值了:
- 跳过前十帧
static int - 限制频率,跳过一些帧(与降频还不一样)
- 得到关键帧的位姿 pose_msg -> R ,T
- 添加关键帧
- 图片
- 关键帧的所有地图点
- 构造新关键帧
- m_process.addKeyFrame,互斥锁
m_process - 可视化 关键帧位姿 visualizeKeyPoses
- 跳过前十帧
- 5S执行一次 ,sleep_fors
- 数据对齐
lio-sam
ImageProjection
Construct
- 订阅 Topic:
- 订阅imu原始数据 imuHandler
- 订阅由vins提供的ros 里程计, odometryHandler
- 订阅雷达
边栏推荐
- std::memory_order_seq_cst内存序
- Bluetooth health management device based on stm32
- 集合框架 泛型LinkedList TreeSet
- 高等数学第七章微分方程
- torch.utils.data.RandomSampler和torch.utils.data.SequentialSampler的区别
- Quelques exercices sur les arbres binaires
- 【STM32】HAL库 STM32CubeMX教程十二—IIC(读取AT24C02 )
- JS 文件上传下载
- QT运行显示 This application failed to start because it could not find or load the Qt platform plugin
- 别再用 System.currentTimeMillis() 统计耗时了,太 Low,StopWatch 好用到爆!
猜你喜欢

HiTek电源维修X光机高压发生器维修XR150-603-02
![[system design] proximity service](/img/02/57f9ded0435a73f86dce6eb8c16382.png)
[system design] proximity service

使用aspose-slides将ppt转pdf

Apache POI的读写

高等数学第七章微分方程
![文件名设置导致writelines写入报错:OSError: [Errno 22] Invalid argument](/img/08/2d4f425e6941af35616911672b6fed.png)
文件名设置导致writelines写入报错:OSError: [Errno 22] Invalid argument

Es update values based on Index Names and index fields

ucore lab3

如何获取GC(垃圾回收器)的STW(暂停)时间?

Your brain is learning automatically when you sleep! Here comes the first human experimental evidence: accelerate playback 1-4 times, and the effect of deep sleep stage is the best
随机推荐
ucore lab5
Shortcut key bug, reproducible (it seems that bug is the required function [funny.Gif])
运维一线工作常用shell脚本再整理
通俗易懂理解朴素贝叶斯分类的拉普拉斯平滑
R语言使用caret包的preProcess函数进行数据预处理:对所有的数据列进行center中心化(每个数据列减去平均值)、设置method参数为center
Five page Jump methods for wechat applet learning
有關二叉樹的一些練習題
Conception de plusieurs classes
提高效率 Or 增加成本,开发人员应如何理解结对编程?
Arduino PROGMEM静态存储区的使用介绍
队列,双向队列,及其运用
12个网络工程师必备工具
更改pip镜像源
【STM32】HAL库 STM32CubeMX教程十二—IIC(读取AT24C02 )
R language plot visualization: visualize the normalized histograms of multiple data sets, add density curve KDE to the histograms, set different histograms to use different bin sizes, and add edge whi
详解各种光学仪器成像原理
细说物体检测中的Anchors
main()的参数argc与argv
MYSQL精通-01 增删改
1098 Insertion or Heap Sort(堆排序解释)(PAT甲级)