当前位置:网站首页>Learning Note 6 - satellite positioning technology (Part 1)
Learning Note 6 - satellite positioning technology (Part 1)
2022-07-05 10:21:00 【FUXI_ Willard】
This blog series includes 6 A column , Respectively :《 Overview of autopilot Technology 》、《 Technical foundation of autopilot vehicle platform 》、《 Autopilot positioning technology 》、《 Self driving vehicle environment perception 》、《 Decision and control of autonomous driving vehicle 》、《 Design and application of automatic driving system 》.
This column is about 《 Autopilot positioning technology 》 Book notes .
1. Satellite positioning technology
1.1 Introduction to satellite navigation and positioning system
1.1.1 The global 4 Large navigation satellite system
The global positioning system of the United States (Global Positioning System,GPS)、 GLONASS satellite navigation system in Russia (Global Navigation Satellite System,GLONASS)、 China's Beidou satellite navigation system (Beidou Navigation Satellite System,BDS)、 Galileo satellite navigation system of EU (Galileo Satellite Navigation System,GALILEO);
GPS
GPS from 3 Part of the form , That is, the space satellite part 、 Ground monitoring part and user receiving part ;
- Space satellite part ( Space segment ): from 21 star GPS Working satellites and 3 Two in orbit standby satellites form a complete 21+3 Formal GPS Satellite working constellation ; This configuration satisfies any place on earth 、 At least... Can be observed at any time 4 Satellites with good geometric relationship are used for positioning ;
- Ground control part ( Ground segment ): By a master control station distributed all over the world 、3 Injection stations and several monitoring stations ;
- User receiving part ( User segment ): Mainly receive navigation 、 Location and timing Services , These services are widely used in various fields ;
GLONASS
GLONASS By space segment 、 Ground segment 、 The user segment consists of ;
- Space segment : from 24 Satellites make up , among 21 It's a working satellite ,3 Backup satellites ; If GLONASS The constellation is complete , It can be satisfied anywhere on the earth 、 At any time can receive from at least 4 A signal from a satellite , So as to obtain reliable navigation and positioning information ;
- Ground segment : Including the tracking control station network of the system control center , These tracking and control stations are scattered on Russian territory ;
- User segment : Receive satellite navigation signals , So as to obtain the required location 、 Speed 、 Time information ;
BDS
Beidou system is composed of space section 、 Ground segment 、 The user segment consists of ;
- Space segment : from 5 A geostationary orbit (Geostationary Orbit,GEO) Satellites and 30 A non geostationary orbit (Nongeostationary Orbit,NON-GEO) Satellite composition ; Beidou-2 regional navigation system adopts 5 star GEO satellite 、3 An inclined geosynchronous orbit (Inclined Geosynchronous Orbit,IGSO) Satellites and 4 The orbit of the earth in the moon (Medium Earth Orbit,MEO) Constellation scheme composed of navigation satellites ; Beidou-3 navigation system consists of 5 star GEO Satellites and 30 star NON-GEO Satellites make up all 35 satellite ;
- GEO+MEO+IGSO Constellation configuration is the complete layout of Beidou satellite navigation system , Guaranteed anywhere on earth 、 Can receive from at any time 4 Signals transmitted by more than navigation satellites , Areas with good observation conditions can even receive 10 Signals from more than satellites ;
- Ground segment : Including monitoring stations 、 Uplink injection station 、 The main control station ;
GALILEO
GALILEO Divided into space segments 、 Ground segment 、 User segment ;
- Space segment : Distributed in 3 On two tracks 30 star MEO Satellite composition , among 27 A working satellite 、3 Backup satellites ;
- Ground segment : from 2 Ground control stations ,29 Galileo sensor stations and 5 individual S Band uplink station and 10 individual C Band uplink station composition , Sensor stations and uplink stations are distributed all over the world ;
- User segment : Provide independent of other satellite navigation systems 5 A basic service ;
1.1.2 Regional satellite navigation system
- Japan's Quasi zenith satellite system (Quasi-Zenith Satellite System,QZSS);
- India's regional navigation satellite system (Indian Regional Navigation Satellite System,IRNSS);
1.1.3 Satellite based augmentation system
Satellite based augmentation system (Satellite-Based Augmentation System,SBAS) Us implementation selects availability (Selective Availability,SA) Policy development ;SBAS It is mainly composed of space segments 、 Ground segment 、 The user segment consists of ; Typical enhancement system :
- In the United States WAAS(Wide Area Augmentation System);
- Russia's SDCM(System for Differential Corrections and Monitoring);
- Japan's MSAS(Multi-functional Satellite Augementation System);
- Europe's EGNOS(European Geostationary Navigation Overlay Service);
- India's GAGAN(GPS Aided Geo Augmented Navigation);
1.1.4 Foundation reinforcement system
Foundation reinforcement system (Ground-Based Augmentation Systems,GBAS) Use a variety of navigation enhancement technologies with different effects , It mainly includes : Precision enhancement technology 、 Integrity enhancement technology 、 Continuity and availability enhancement technology , Realize the function of enhancing the performance of satellite navigation service ;
Beidou foundation enhancement system consists of frame network reference station and enhanced density network reference station 、 Communication network 、 Data processing system 、 Operation platform 、 Data broadcasting system and user terminal , It has the ability to provide users with wide area real-time meter level services nationwide 、 Decimeter scale 、 The ability of centimeter level and post-processing millimeter level positioning accuracy , It has a wide range of functions 、 High precision 、 Advantages of field single machine operation ;
1.2 GNSS Positioning principle
To achieve GNSS location , Two problems need to be solved : One is to observe the space position of the satellite at the moment ; The second is the distance between the observation station and the satellite , That is, the coordinates of the satellite in a certain coordinate system ;
1.2.1 Time coordinate system
- In satellite navigation system , Coordinate system is used to describe and study the motion of satellite in its orbit 、 Express the position of the ground observation station and process the positioning observation data ;
- The coordinate system is roughly divided into : Geographic coordinate system 、 Inertial coordinate system 、 The earth coordinate system 、 The geocentric coordinate system 、 Reference center coordinate system ;
- Commonly used coordinate system in China :1954 Beijing 54 Coordinate system (Beijing 54 Coordinate System,P54)、1980 National geodetic coordinate system (National Geodetic Coordinate System 1980,C80)、1984 World geodetic coordinate system (World Geodetic System-1984 Coordinate System,WGS-1984)、2000 National geodetic coordinate system (China Geodetic Coordinate System 2000,CGCS2000);
- The time system mainly includes : World time 、 In the almanac 、 In Mechanics 、 Atomic time 、 Coordinated universal time 、 Julian day 、 Satellite navigation time system ;
- GNSS An independent time system is used as the basis for navigation and positioning calculation , be called GNSS Time system , abbreviation GNSST;GNSST It belongs to the atomic time system , Its second length is the same as the atomic time ;
1.2.2 Positioning principle
Suppose the ground measures a certain point P P P To satellite S 1 S_1 S1 The distance to r 1 r_1 r1, From geometry , P P P The space where the point is located may be reduced to a sphere , The center of this sphere is a satellite S 1 S_1 S1, The radius is r 1 r_1 r1; Let's assume that P P P Point to the second satellite S 2 S_2 S2 The distance to r 2 r_2 r2, Again , P P P The point is located on the second satellite S 2 S_2 S2 For the center of the ball , The radius is r 2 r_2 r2 On the surface of the ball ; If measured at the same time P P P Point to the third satellite S 3 S_3 S3 The distance to r 3 r_3 r3, namely P P P The point is located on the third satellite S 3 S_3 S3 For the center of the ball , The radius is r 3 r_3 r3 On the surface of the ball , This will determine P P P Point location , That is, the intersection of three spheres .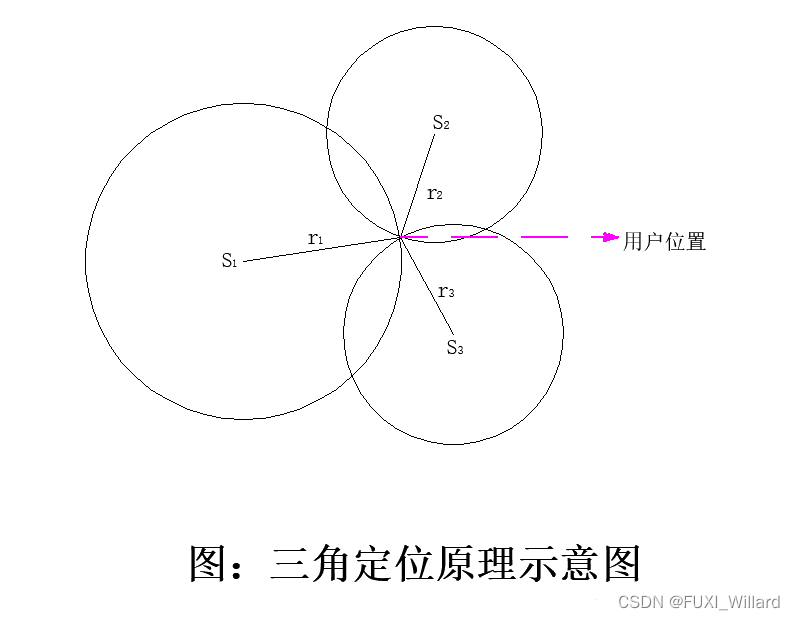
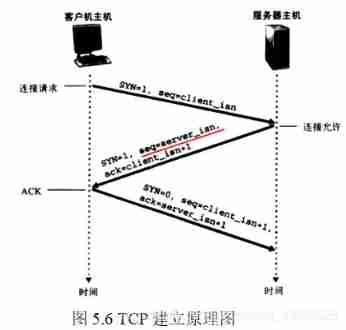
because GNSS One way ranging is adopted , It is difficult to ensure the strict synchronization between the satellite clock and the user receiver clock , The distance between the observation station and the satellite is affected by the non synchronization of the two clocks ; The satellite clock error can be corrected by the relevant clock error parameters given in the navigation message , Most of the receiver clock errors are difficult to accurately determine , The usual optimization method is to take it as an unknown parameter , Solve it together with the coordinates of the observation station , That is, generally, it needs to be solved at an observation station 4 Unknown parameters (3 The sum of two point coordinate components 1 Clock error parameters ), So at least 4 Synchronous pseudo range observations , That is, it is necessary to observe 4 satellite ;
According to the motion state of the user station GNSS It is divided into static positioning and dynamic positioning .
- Static positioning : Fix the waiting point , Place the receiver on the waiting point for a large number of repeated observations ;
- Dynamic positioning : Indicates that the point to be fixed is in motion , Determine the point coordinates of the point to be moved at each observation time , And the state parameters of the moving carrier , Such as : Speed 、 Time and location, etc ;
According to the positioning mode, it is divided into absolute positioning and relative positioning .
- Absolute positioning : Only one receiver is used for positioning , It is called single point positioning , What is determined is the absolute position of the receiver antenna in the coordinate system ;
- Relative positioning : It refers to placing two receivers on two fixed undetermined points , Or fix a point on a known point , Another point serves as the flow waiting point , After a period of synchronous observation , The relative position between two points can be determined , So as to obtain high-precision position coordinates ;
边栏推荐
- [C language] the use of dynamic memory development "malloc"
- Click the picture in the mobile browser and the picture will not pop up
- Unity particle special effects series - the poison spray preform is ready, and the unitypackage package is directly used - on
- The horizontally scrolling recycleview displays five and a half on one screen, lower than the average distribution of five
- RMS to EAP is simply implemented through mqtt
- Constrained layout flow
- MySQL character type learning notes
- WorkManager的学习二
- The Alipay in place function can't be found, and the Alipay in place function is offline
- 基于单片机步进电机控制器设计(正转反转指示灯挡位)
猜你喜欢




随机推荐
[system design] index monitoring and alarm system
高级 OpenCV:BGR 像素强度图
Cut off 20% of Imagenet data volume, and the performance of the model will not decline! Meta Stanford et al. Proposed a new method, using knowledge distillation to slim down the data set
最全是一次I2C总结
uniapp + uniCloud+unipay 实现微信小程序支付功能
AtCoder Beginner Contest 258「ABCDEFG」
伪类元素--before和after
Flink CDC cannot monitor MySQL logs. Have you ever encountered this problem?
RMS TO EAP通过MQTT简单实现
The horizontally scrolling recycleview displays five and a half on one screen, lower than the average distribution of five
AtCoder Beginner Contest 258「ABCDEFG」
How to plan the career of a programmer?
ArcGIS Pro creating features
Usage differences between isempty and isblank
Have you learned to make money in Dingding, enterprise micro and Feishu?
程序员搞开源,读什么书最合适?
Detailed explanation of the use of staticlayout
La vue latérale du cycle affiche cinq demi - écrans en dessous de cinq distributions moyennes
mongoDB副本集
《剑来》语句摘录(七)