当前位置:网站首页>[path planning] use the vertical distance limit method and Bessel to optimize the path of a star
[path planning] use the vertical distance limit method and Bessel to optimize the path of a star
2022-07-07 23:47:00 【Chinchilla slightly】
Before using general A* Algorithm to plan the path , It can be found that there are many redundant points on the path , As shown in the figure below :

It is obvious from the above figure that some bending points are redundant , Therefore, this section introduces the use of vertical distance limit method to optimize redundant points .
Vertical distance limit method
The idea of vertical distance limit method is also relatively simple , To sum up, it is : Calculate the distance from the current node to the upper node and the lower node , If it exceeds a certain threshold, the current point is deleted from the total set . The general idea is just like its name .

Here I write a function Vertical_distance_limit:

Of course , In this function, I encapsulate another function , That is, the function of calculating the vertical distance compute_vertical_distance
Vertical distance calculation
About vertical distance calculation , We can use vector method , As shown in the figure below :

Use Vector method The steps of calculating the vertical distance can be carried out as follows :
1) First calculate the vector last_to_next Unit vector u_last_to_next
2) Calculate the vector last_to_pos, Calculated after last_to_pos And vector u_last_to_next Dot product of , That is to say last_to_pos To vector u_last_to_next The projection length on the surface L
3) Using vectors u_last_to_next multiply L That's the vector last_to_closest
4) Use last Coordinates of plus last_to_closest You can find out. closest Coordinates of
5) And then you can figure out pos And closest Distance of
The effect of using the vertical distance limit method
After adding the vertical distance optimization, the following effects can be obtained :

The red connecting point in the above figure is the initial A* Algorithm path point , The green connection point is the optimized path point
Use fifth order Bessel to optimize the path
After optimizing the path , We can further use Bezier curve to plan a smoother curve :

Add motion trajectory model
Then we can do as before RRT like that , Increase the speed S Trajectory model of curve , The end result is this :
A* Algorithm + Vertical distance limit method + Bessel + Motion model trajectory
边栏推荐
- Extract the file name under the folder under win
- Codeworks 5 questions per day (average 1500) - day 8
- 【7.4】25. Turn over the linked list in groups of K
- Where are you going
- Data analysis series 3 σ Rule / eliminate outliers according to laida criterion
- C cat and dog
- mysql8.0 ubuntu20.4
- BSS 7230 flame retardant performance test of aviation interior materials
- 数据湖(十五):Spark与Iceberg整合写操作
- Chisel tutorial - 02 Chisel environment configuration and implementation and testing of the first chisel module
猜你喜欢

Class C design questions

一份假Offer如何盗走了「Axie infinity」5.4亿美元?

95.(cesium篇)cesium动态单体化-3D建筑物(楼栋)

MongoDB快速入门

Uic564-2 Appendix 4 - flame retardant fire test: flame diffusion
保证接口数据安全的10种方案
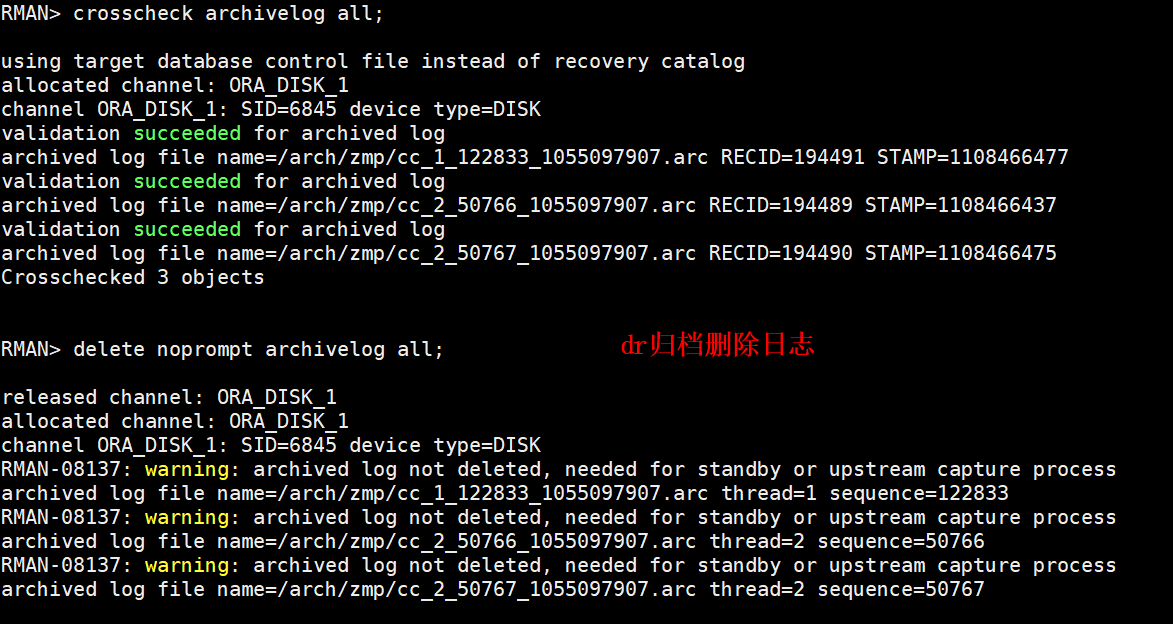
DataGuard active / standby cleanup archive settings
受限线性表
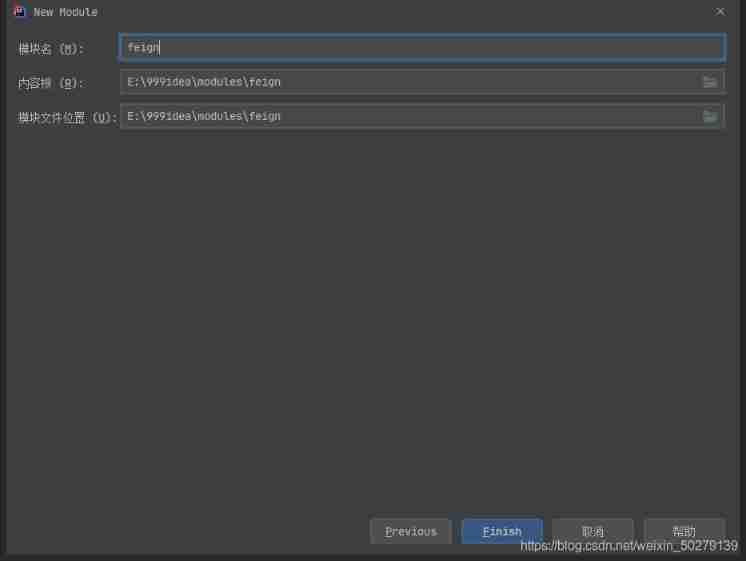
Take you hand in hand to build feign with idea
10 schemes to ensure interface data security
随机推荐
C - linear table
Wechat applet development beginner 1
C - Fibonacci sequence again
[STM32 + esp-12s connect Tencent cloud IOT development platform 1] creation of cloud platform and burning of at firmware
C method question 2
数据库面试题+解析
Chisel tutorial - 01 Introduction to Scala
Uic564-2 Appendix 4 - flame retardant fire test: flame diffusion
mysql8.0 ubuntu20.4
Flash download setup
The file format and extension of XLS do not match
HDU - 1260 Tickets(线性DP)
Possible SQL for Oracle table lookup information
BSS 7230 航空内饰材料阻燃性能测试
二叉排序树【BST】——创建、查找、删除、输出
Resolve the URL of token
Pycharm essential plug-in, change the background (self use, continuous update) | CSDN creation punch in
一个测试工程师的7年感悟 ---- 致在一路独行的你(别放弃)
Extract the file name under the folder under win
【7.4】25. Turn over the linked list in groups of K