当前位置:网站首页>Hidden Markov model (HMM): model parameter estimation
Hidden Markov model (HMM): model parameter estimation
2022-07-01 16:53:00 【HadesZ~】
It is estimated that HMM Model parameters , According to whether the observation sequence corresponds to the state sequence , It can be divided into supervised learning algorithm and unsupervised learning algorithm .
1. Supervised learning estimation HMM Model parameters
Suppose the given training data contains n n n Observation sequence and corresponding state sequence ( The length of different observation sequences can be the same , It can be different ) { ( X 1 , Y 1 ) , ( X 2 , Y 2 ) , ⋯ , ( X n , Y n ) } \{(X_1, Y_1), (X_2, Y_2), \cdots, (X_n, Y_n)\} { (X1,Y1),(X2,Y2),⋯,(Xn,Yn)}, When the state and hang test sequence are known , The model parameter values on each sample can be obtained by direct statistics according to the definition of model parameters , Then the estimation of model parameters can be obtained by calculating the expectation on all samples of the whole training data set .
1.1 Transfer probability a i j a_{ij} aij Estimation
Set the first k k k Among samples , t t t Always in the State s i s_i si、 t + 1 t+1 t+1 Always in the State s j s_j sj The frequency of is A i j A_{ij} Aij, So the state transition probability a i j a_{ij} aij My estimate is :
a ^ i j = ∑ k = 1 n A i j ∑ k = 1 n ∑ j = 1 N A i j , i = 1 , 2 , ⋯ , N ; j = 1 , 2 , ⋯ , N (1.1) \hat{a}_{ij} = \frac{ \sum_{k=1}^{n} A_{ij} }{ \sum_{k=1}^{n} \sum_{j=1}^{N} A_{ij} }, \ \ \ \ \ \ i = 1, 2, \cdots, N; \ \ \ \ j = 1, 2, \cdots, N \tag{1.1} a^ij=∑k=1n∑j=1NAij∑k=1nAij, i=1,2,⋯,N; j=1,2,⋯,N(1.1)
1.2 Observed probability of occurrence b j ( v l ) b_j(v_l) bj(vl) Estimation
Set the first k k k Among samples , Status as s j s_j sj And the observation is o l o_l ol The frequency of this is B j l B_{jl} Bjl, Then the observed probability of occurrence b j ( v l ) b_j(v_l) bj(vl) My estimate is :
b ^ j ( o l ) = ∑ k = 1 n B j l ∑ k = 1 n ∑ l = 1 M B j l , i = 1 , 2 , ⋯ , N ; l = 1 , 2 , ⋯ , M (1.2) \hat{b}_{j}(o_l) = \frac{ \sum_{k=1}^{n} B_{jl} }{ \sum_{k=1}^{n} \sum_{l=1}^{M} B_{jl} }, \ \ \ \ \ \ i = 1, 2, \cdots, N; \ \ \ \ l = 1, 2, \cdots, M \tag{1.2} b^j(ol)=∑k=1n∑l=1MBjl∑k=1nBjl, i=1,2,⋯,N; l=1,2,⋯,M(1.2)
1.3 Initial state probability π i \pi_i πi Estimation
Initial state probability π i \pi_i πi My estimate is n n n Among samples , The frequency of the corresponding state :
π ^ i = 1 n ∑ k = 1 n i f ( y 1 = s i , 1 , 0 ) , i = 1 , 2 , ⋯ , N (1.3) \hat{\pi}_i = \frac{1}{n}\sum_{k=1}^{n}\ if(y_1 = s_i, \ 1, \ 0), \ \ \ \ \ \ i = 1, 2, \cdots, N \tag{1.3} π^i=n1k=1∑n if(y1=si, 1, 0), i=1,2,⋯,N(1.3)
2. Unsupervised learning estimation HMM Model parameters
Because the cost of status tagging is high , So only the observation sequence data is given 、 Request estimate HMM Model parameters are more common . Assume that the training data only contains a length of T T T The sequence of observations X X X And there's no corresponding state sequence Y Y Y, The goal is to estimate the parameters of hidden Markov model λ = ( A , B , π ) \lambda = (A, B, \pi) λ=(A,B,π). In this case , Sequence of States Y Y Y Is an unobservable hidden variable (hidden variable),HHM The model is a probability model with hidden variables :
P ( X ∣ λ ) = ∑ Y P ( X , Y ∣ λ ) = ∑ Y P ( X ∣ Y , λ ) P ( Y ∣ λ ) (2.1) P(X | \lambda)= \sum_{Y}P(X, Y | \lambda) = \sum_{Y}P(X | Y, \lambda)P(Y | \lambda) \tag{2.1} P(X∣λ)=Y∑P(X,Y∣λ)=Y∑P(X∣Y,λ)P(Y∣λ)(2.1) according to EM Algorithm ,HHM The maximum likelihood estimation of model parameters is 1:
λ ^ = arg max λ Q ( λ , λ ˉ ) (2.2) \hat{\lambda} = \argmax_{\lambda} Q(\lambda, \bar{\lambda}) \tag{2.2} λ^=λargmaxQ(λ,λˉ)(2.2) Q ( λ , λ ˉ ) = ∑ Y P ( X , Y ∣ λ ˉ ) ⋅ l o g P ( X , Y ∣ λ ) (2.3) Q(\lambda, \bar{\lambda}) = \sum_{Y} P(X, Y | \bar{\lambda}) \cdot logP(X, Y | \lambda) \tag{2.3} Q(λ,λˉ)=Y∑P(X,Y∣λˉ)⋅logP(X,Y∣λ)(2.3)
according to Q Q Q Function definition , type ( 2.3 ) type (2.3) type (2.3) Omitted λ \lambda λ The constant factor of 1 / P ( X ∣ λ ) 1/P(X | \lambda) 1/P(X∣λ).
Because by definition ,HMM In the model
P ( X , Y ∣ λ ) = π i 1 b i 1 ( x 1 ) ⋅ a i 1 i 2 b i 2 ( x 2 ) ⋯ a i T − 1 i T b i T ( x T ) P(X, Y | \lambda) = \pi_{i_1}b_{i_1}(x_1) \cdot a_{i_1i_2}b_{i_2}(x_2) \cdots a_{i_{T-1}i_T}b_{i_T}(x_T) P(X,Y∣λ)=πi1bi1(x1)⋅ai1i2bi2(x2)⋯aiT−1iTbiT(xT)
So the algorithm based on logarithm , The subitems involved in each parameter of the model in parameter estimation can be disassembled and collected , type ( 2.3 ) type (2.3) type (2.3) It can be rewritten as follows :
Q ( λ , λ ˉ ) = ∑ Y l o g ( π i 1 ) ⋅ P ( X , Y ∣ λ ˉ ) + ∑ Y [ ∑ t = 1 T − 1 l o g ( a i t i t + 1 ) ] ⋅ P ( X , Y ∣ λ ˉ ) + ∑ Y [ ∑ t = 1 T l o g ( b i t ( x t ) ) ] ⋅ P ( X , Y ∣ λ ˉ ) Q(\lambda, \bar{\lambda}) = \sum_{Y} log(\pi_{i_1}) \cdot P(X, Y | \bar{\lambda}) + \sum_{Y} [\sum_{t=1}^{T-1} log(a_{i_ti_{t+1}})] \cdot P(X, Y | \bar{\lambda}) + \sum_{Y} [\sum_{t=1}^{T} log(b_{i_t}(x_t)) ] \cdot P(X, Y | \bar{\lambda}) Q(λ,λˉ)=Y∑log(πi1)⋅P(X,Y∣λˉ)+Y∑[t=1∑T−1log(aitit+1)]⋅P(X,Y∣λˉ)+Y∑[t=1∑Tlog(bit(xt))]⋅P(X,Y∣λˉ)
therefore , Find the model parameters λ \lambda λ Maximum likelihood estimation of , It can be converted to separate calculation Maximum likelihood estimation of each parameter of the model :
π ^ i = arg max π i ∑ Y l o g ( π i 1 ) ⋅ P ( X , Y ∣ λ ˉ ) (2.4) \hat{\pi}_i = \argmax_{\pi_i} \sum_{Y} log(\pi_{i_1}) \cdot P(X, Y | \bar{\lambda}) \tag{2.4} π^i=πiargmaxY∑log(πi1)⋅P(X,Y∣λˉ)(2.4) a ^ i j = arg max π i ∑ Y [ ∑ t = 1 T − 1 l o g ( a i t i t + 1 ) ] ⋅ P ( X , Y ∣ λ ˉ ) (2.5) \hat{a}_{ij} = \argmax_{\pi_i} \sum_{Y} [\sum_{t=1}^{T-1} log(a_{i_ti_{t+1}})] \cdot P(X, Y | \bar{\lambda}) \tag{2.5} a^ij=πiargmaxY∑[t=1∑T−1log(aitit+1)]⋅P(X,Y∣λˉ)(2.5) b ^ j ( k ) = arg max π i ∑ Y [ ∑ t = 1 T l o g ( b i t ( x t ) ) ] ⋅ P ( X , Y ∣ λ ˉ ) (2.6) \hat{b}_j(k) = \argmax_{\pi_i} \sum_{Y} [\sum_{t=1}^{T} log(b_{i_t}(x_t)) ] \cdot P(X, Y | \bar{\lambda}) \tag{2.6} b^j(k)=πiargmaxY∑[t=1∑Tlog(bit(xt))]⋅P(X,Y∣λˉ)(2.6)
2.1 Initial state probability π i \pi_i πi Estimation
π ^ i = arg max π i ∑ Y l o g ( π i 1 ) ⋅ P ( X , Y ∣ λ ˉ ) (2.4) \hat{\pi}_i = \argmax_{\pi_i} \sum_{Y} log(\pi_{i_1}) \cdot P(X, Y | \bar{\lambda}) \tag{2.4} π^i=πiargmaxY∑log(πi1)⋅P(X,Y∣λˉ)(2.4) π ^ i = arg max π i ∑ i = 1 N l o g ( π i ) ⋅ P ( X , y 1 = s i ∣ λ ˉ ) (2.1.1) \hat{\pi}_i = \argmax_{\pi_i} \sum_{i=1}^{N} log(\pi_{i}) \cdot P(X, y1=s_i | \bar{\lambda}) \tag{2.1.1} π^i=πiargmaxi=1∑Nlog(πi)⋅P(X,y1=si∣λˉ)(2.1.1)
be aware π i \pi_i πi Meet the constraints ∑ i = 1 N π i = 1 \sum_{i=1}^{N} \pi_i = 1 ∑i=1Nπi=1, Write type ( 2.1.1 ) type (2.1.1) type (2.1.1) Lagrange function of :
∑ i = 1 N l o g ( π i ) ⋅ P ( X , y 1 = s i ∣ λ ˉ ) + γ ( ∑ i = 1 N π i − 1 ) (2.1.2) \sum_{i=1}^{N} log(\pi_{i}) \cdot P(X, y1=s_i | \bar{\lambda}) + \gamma(\sum_{i=1}^{N} \pi_i - 1) \tag{2.1.2} i=1∑Nlog(πi)⋅P(X,y1=si∣λˉ)+γ(i=1∑Nπi−1)(2.1.2)
Yes type ( 2.1.2 ) type (2.1.2) type (2.1.2) About π i \pi_i πi And make the result equal to 0, have to :
P ( X , y 1 = s i ∣ λ ˉ ) π i + γ = 0 \frac{P(X, y1=s_i | \bar{\lambda})}{\pi_{i}} + \gamma = 0 πiP(X,y1=si∣λˉ)+γ=0 P ( X , y 1 = s i ∣ λ ˉ ) + γ π i = 0 (2.1.3) P(X, y1=s_i | \bar{\lambda}) + \gamma \pi_{i} = 0 \tag{2.1.3} P(X,y1=si∣λˉ)+γπi=0(2.1.3)
Yes type ( 2.1.3 ) type (2.1.3) type (2.1.3) All in i i i Sum of possible situations , obtain :
∑ i = 1 N [ P ( X , y 1 = s i ∣ λ ˉ ) + γ π i ] = 0 \sum_{i=1}^{N} [P(X, y1=s_i | \bar{\lambda}) + \gamma \pi_{i}] = 0 i=1∑N[P(X,y1=si∣λˉ)+γπi]=0 ∑ i = 1 N P ( X , y 1 = s i ∣ λ ˉ ) + γ ∑ i = 1 N π i = 0 (2.1.4) \sum_{i=1}^{N} P(X, y1=s_i | \bar{\lambda}) + \gamma \sum_{i=1}^{N} \pi_{i} = 0 \tag{2.1.4} i=1∑NP(X,y1=si∣λˉ)+γi=1∑Nπi=0(2.1.4) because
{ ∑ i = 1 N P ( X , y 1 = s i ∣ λ ˉ ) = P ( X ∣ λ ˉ ) ∑ i = 1 N π i = 1 \begin{cases} \sum_{i=1}^{N} P(X, y1=s_i | \bar{\lambda}) = P(X | \bar {\lambda}) \\ \\ \sum_{i=1}^{N} \pi_{i} = 1 \end{cases} ⎩⎪⎨⎪⎧∑i=1NP(X,y1=si∣λˉ)=P(X∣λˉ)∑i=1Nπi=1 therefore
γ = − P ( X ∣ λ ˉ ) (2.1.5) \gamma = -P(X | \bar {\lambda}) \tag{2.1.5} γ=−P(X∣λˉ)(2.1.5)
So bring it into type ( 2.1.3 ) type (2.1.3) type (2.1.3) after , Get parameters π i \pi_i πi Maximum likelihood estimation of :
π ^ i = P ( X , y 1 = s i ∣ λ ˉ ) P ( X ∣ λ ˉ ) (2.1.6) \hat{\pi}_i = \frac{P(X, y1=s_i | \bar{\lambda})}{P(X | \bar {\lambda})} \tag{2.1.6} π^i=P(X∣λˉ)P(X,y1=si∣λˉ)(2.1.6)
2.2 Transfer probability a i j a_{ij} aij Estimation
a ^ i j = arg max π i ∑ Y [ ∑ t = 1 T − 1 l o g ( a i t i t + 1 ) ] ⋅ P ( X , Y ∣ λ ˉ ) (2.5) \hat{a}_{ij} = \argmax_{\pi_i} \sum_{Y} [\sum_{t=1}^{T-1} log(a_{i_ti_{t+1}})] \cdot P(X, Y | \bar{\lambda}) \tag{2.5} a^ij=πiargmaxY∑[t=1∑T−1log(aitit+1)]⋅P(X,Y∣λˉ)(2.5) a ^ i j = arg max π i ∑ i = 1 N ∑ j = 1 N ∑ t = 1 T − 1 l o g ( a i j ) ⋅ P ( X , y t = s i , y t + 1 = s j ∣ λ ˉ ) (2.2.1) \hat{a}_{ij} = \argmax_{\pi_i} \sum_{i=1}^{N} \sum_{j=1}^{N} \sum_{t=1}^{T-1} log(a_{ij}) \cdot P(X, y_t=s_i, y_{t+1}=s_j | \bar{\lambda}) \tag{2.2.1} a^ij=πiargmaxi=1∑Nj=1∑Nt=1∑T−1log(aij)⋅P(X,yt=si,yt+1=sj∣λˉ)(2.2.1)
Empathy , The application has constraints ∑ j = 1 N a i j = 1 \sum_{j=1}^{N} a_{ij} = 1 ∑j=1Naij=1 Lagrange multiplier method , We can work out a i j a_{ij} aij Maximum likelihood estimation of :
a ^ i j = ∑ t = 1 T − 1 P ( X , y t = s i , y t + 1 = s j ∣ λ ˉ ) ∑ t = 1 T − 1 P ( X , y t = s i ∣ λ ˉ ) (2.2.2) \hat{a}_{ij} = \frac{ \sum_{t=1}^{T-1} P(X, y_t=s_i, y_{t+1}=s_j | \bar{\lambda}) }{ \sum_{t=1}^{T-1} P(X, y_t=s_i | \bar{\lambda}) } \tag{2.2.2} a^ij=∑t=1T−1P(X,yt=si∣λˉ)∑t=1T−1P(X,yt=si,yt+1=sj∣λˉ)(2.2.2)
2.3 Observed probability of occurrence b j ( v l ) b_j(v_l) bj(vl) Estimation
b ^ j ( k ) = arg max π i ∑ Y [ ∑ t = 1 T l o g ( b i t ( x t ) ) ] ⋅ P ( X , Y ∣ λ ˉ ) (2.6) \hat{b}_j(k) = \argmax_{\pi_i} \sum_{Y} [\sum_{t=1}^{T} log(b_{i_t}(x_t)) ] \cdot P(X, Y | \bar{\lambda}) \tag{2.6} b^j(k)=πiargmaxY∑[t=1∑Tlog(bit(xt))]⋅P(X,Y∣λˉ)(2.6) b ^ j ( k ) = arg max π i ∑ j = 1 N [ ∑ t = 1 T l o g ( b j ( x t ) ) ] ⋅ P ( X , y t = s j ∣ λ ˉ ) (2.3.1) \hat{b}_j(k) = \argmax_{\pi_i} \sum_{j=1}^{N} [\sum_{t=1}^{T} log(b_{j}(x_t)) ] \cdot P(X, y_t=s_j | \bar{\lambda}) \tag{2.3.1} b^j(k)=πiargmaxj=1∑N[t=1∑Tlog(bj(xt))]⋅P(X,yt=sj∣λˉ)(2.3.1)
The Lagrange multiplier method is also applied , The constraint is ∑ k = 1 M b j ( k ) = 1 \sum_{k=1}^{M} b_j(k) = 1 ∑k=1Mbj(k)=1. Be careful , Only in x t = o k x_t = o_k xt=ok when b j ( x t ) b_j(x_t) bj(xt) Yes b j ( k ) b_j(k) bj(k) The partial derivative of is not always 0, Get b j ( k ) b_j(k) bj(k) Maximum likelihood estimation of :
b ^ j ( k ) = ∑ t = 1 T P ( X ∩ x ˉ t , x t = o k , y t = s j ∣ λ ˉ ) ∑ t = 1 T ∑ k = 1 M P ( X ∩ x ˉ t , x t = o k , y t = s j ∣ λ ˉ ) \hat{b}_j(k) = \frac{ \sum_{t=1}^{T} P(X \cap \bar{x}_t, x_t=o_k, y_t=s_j | \bar{\lambda}) }{ \sum_{t=1}^{T} \sum_{k=1}^{M} P(X \cap \bar{x}_t, x_t=o_k, y_t=s_j | \bar{\lambda}) } b^j(k)=∑t=1T∑k=1MP(X∩xˉt,xt=ok,yt=sj∣λˉ)∑t=1TP(X∩xˉt,xt=ok,yt=sj∣λˉ)
2.4 Baum-Welch Algorithm implementation
Input : Observation sequence of random process
Output : Maximum likelihood estimation of hidden Markov model parameters .
(1) initialization
about n = 0 n=0 n=0, Select any that meets the defined range a i j ( 0 ) , b j ( k ) ( 0 ) , π i ( 0 ) a_{ij}^{(0)}, \ b_{j}(k)^{(0)}, \ \pi_i^{(0)} aij(0), bj(k)(0), πi(0), Get the initial value of model parameters λ ( 0 ) = ( A ( 0 ) , B ( 0 ) , π ( 0 ) ) \lambda^{(0)} = (A^{(0)}, B^{(0)}, \pi^{(0)}) λ(0)=(A(0),B(0),π(0));
(2) Iterative training
a i j ( n + 1 ) = ∑ t = 1 T − 1 ξ t ( i , j ∣ X , λ ( n ) ) ∑ t = 1 T − 1 γ t ( i ∣ X , λ ( n ) ) a_{ij}^{(n+1)} = \ \frac{ \sum_{t=1}^{T-1} \xi_t(i,j | X, \lambda^{(n)}) }{ \sum_{t=1}^{T-1} \gamma_t(i | X, \lambda^{(n)}) } aij(n+1)= ∑t=1T−1γt(i∣X,λ(n))∑t=1T−1ξt(i,j∣X,λ(n))
b j ( k ) ( n + 1 ) = ∑ t = 1 , x t = o k T − 1 γ t ( j ∣ X , λ ( n ) ) ∑ t = 1 T − 1 γ t ( j ∣ X , λ ( n ) ) b_j(k)^{(n+1)} = \ \frac{ \sum_{t=1, \ x_t=o_k}^{T-1} \gamma_t(j | X, \lambda^{(n)}) }{ \sum_{t=1}^{T-1} \gamma_t(j | X, \lambda^{(n)}) } bj(k)(n+1)= ∑t=1T−1γt(j∣X,λ(n))∑t=1, xt=okT−1γt(j∣X,λ(n))
π i ( n + 1 ) = γ 1 ( i ∣ X , λ ( n ) ) \pi_i^{(n+1)} = \gamma_1(i | X, \lambda^{(n)}) πi(n+1)=γ1(i∣X,λ(n))
In style ξ t ( i , j ) \xi_t(i,j) ξt(i,j) and γ t ( i ) \gamma_t(i) γt(i) from HMM Forward algorithm and backward algorithm of the model are introduced , Please refer to the author's article for the specific derivation process : The hidden Markov model (HMM): Calculate the probability of occurrence of the observation sequence No 4 Section .
(3) End
When λ ( n + 1 ) \lambda^{(n+1)} λ(n+1) Almost no longer changes or changes are less than a given threshold ( That is, it has converged ) when , Stop iterative training . Get the maximum likelihood estimation of the model parameters :
{ a ^ i j = a i j ( n + 1 ) b ^ j ( k ) = b j ( k ) ( n + 1 ) π ^ i = π i ( n + 1 ) \begin{cases} \hat{a}_{ij} = a_{ij}^{(n+1)} \\ \\ \hat{b}_j(k) = b_j(k)^{(n+1)} \\ \\ \hat{\pi}_i = \pi_i^{(n+1)} \end{cases} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧a^ij=aij(n+1)b^j(k)=bj(k)(n+1)π^i=πi(n+1)
Derivation process , See the author's article :EM Algorithm (expectation maximization algorithm) Maximum likelihood estimation method of parameters of probability model with hidden variables ︎
边栏推荐
- Alibaba cloud, Zhuoyi technology beach grabbing dialogue AI
- China benzene hydrogenation Market Research and investment forecast report (2022 Edition)
- String class
- Authentication processing in interface testing framework
- Computed property “xxx“ was assigned to but it has no setter.
- The difference between the lazy mode of singleton mode and the evil mode
- Gaussdb (for MySQL):partial result cache, which accelerates the operator by caching intermediate results
- Is the securities account given by the head teacher of goucai school safe? Can I open an account?
- Redis 分布式锁
- AI college entrance examination volunteer filling: the gods of Dachang fight, and candidates pay to watch
猜你喜欢

Graduation season | Huawei experts teach the interview secret: how to get a high paying offer from a large factory?

Babbitt | yuan universe daily must read: Naixue coin, Yuan universe paradise, virtual stock game Do you understand Naixue's tea's marketing campaign of "operation pull full"

Défaillance lors du démarrage de la machine virtuelle VMware: le poste de travail VMware n'est pas compatible avec hyper - V...

How to solve the problem that the battery icon of notebook computer does not display
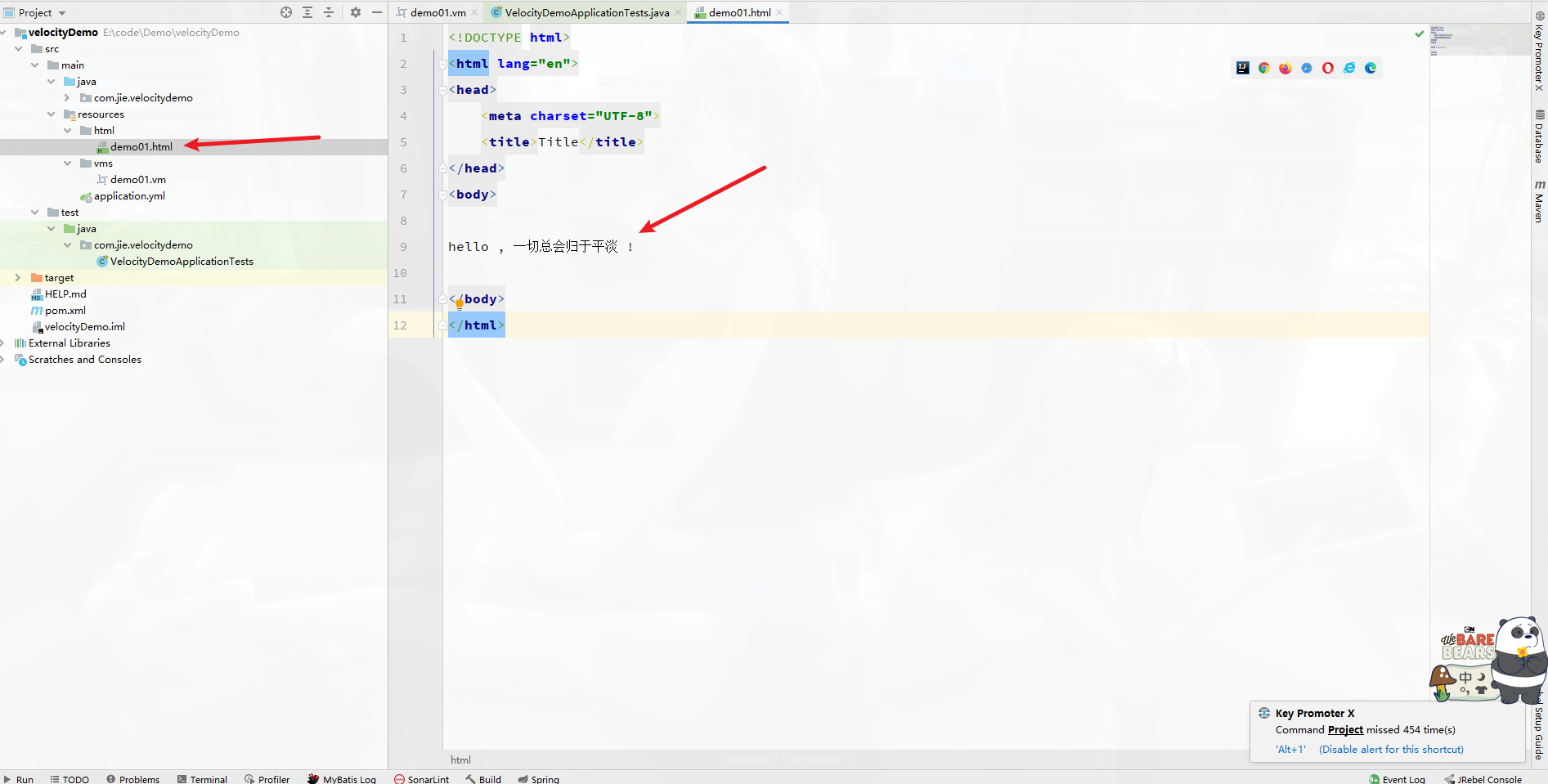
Template Engine Velocity Foundation
VMware 虛擬機啟動時出現故障:VMware Workstation 與 Hyper-v 不兼容...

sql刷题627. 变更性别

独家消息:阿里云悄然推出RPA云电脑,已与多家RPA厂商开放合作
How to restore the system of Sony laptop
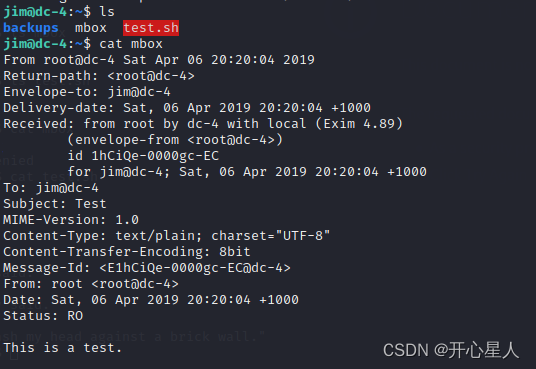
【Try to Hack】vulnhub DC4
随机推荐
Leetcode 77 combination -- backtracking method
为国产数据库添砖加瓦,StoneDB 一体化实时 HTAP 数据库正式开源!
[pyg] document summary and project experience (continuously updated
Mlperf training v2.0 list released, with the same GPU configuration, the performance of Baidu PaddlePaddle ranks first in the world
Sword finger offer II 015 All modifiers in the string
单例模式的懒汉模式跟恶汉模式的区别
SystemVerilog structure (II)
【Try to Hack】vulnhub DC4
Redis 分布式鎖
Is the programmer's career really short?
[nodemon] app crashed - waiting for file changes before starting... resolvent
The amazing open source animation library is not only awesome, but also small
数据库系统原理与应用教程(006)—— 编译安装 MySQL5.7(Linux 环境)
【C语言补充】判断明天是哪一天(明天的日期)
VMware 虛擬機啟動時出現故障:VMware Workstation 與 Hyper-v 不兼容...
How to restore the system of Sony laptop
Dataframe gets the number of words in the string
SQL question brushing 627 Change gender
Building blocks for domestic databases, stonedb integrated real-time HTAP database is officially open source!
Detailed explanation of activity life cycle and startup mode