当前位置:网站首页>Normal vector point cloud rotation
Normal vector point cloud rotation
2022-07-04 09:40:00 【Coding leaves】
During point cloud processing , Sometimes we need to rotate the point cloud to the specified direction according to the normal vector . for example , We need to rotate the ground in the LIDAR point cloud to xoy The plane is parallel . This section will introduce the principle and python Code .
1 Plane equation
The plane equation can be expressed by the following formula :
be (A, B, C) Is a normal vector of the plane , Please refer to the blog for the derivation method :python 3D point cloud projection ( One )_Coding Leaves blog -CSDN Blog _ Point cloud projection .
2 Normal vector rotation
As shown in the figure below , Suppose that the vector n0 Is the original normal vector ,n1 Is the direction of the target vector . Our goal is to n0 Rotate to n1 Direction .n0 The coordinates of the for (x0, y0, z0),n1 The coordinates of the for (x1, y1, z1), The origin coordinates are O(0, 0, 0). These three coordinates form a plane , And the rotation axis is perpendicular to the plane , And pass through the coordinate origin , That is, the normal vector of the plane . Through these three points, the plane equation is calculated as follows :

namely :
Then a normal vector of the plane is  , That is, the vector of the rotation axis .
, That is, the vector of the rotation axis .
vector n0 To vector n1 The angle of rotation of theta Is the angle between these two vectors , namely :

3 open3d Point cloud rotation
The method of point cloud rotation has been published in blog : Point cloud rotation and Translation ( 3、 ... and )—python open3d Point cloud rotation _Coding Leaves blog -CSDN Blog _python Point cloud rotation Detailed introduction , Including Euler angle rotation 、 Shaft angle rotation 、 Quaternion rotation, etc . Here, the shaft angle is used for rotation , The module length of the rotation axis vector is the size of the rotation angle . According to the first 2 The rotation axis vector and rotation angle in section can be obtained open3d Axis vector required in , The calculation formula is as follows :

4 Reference code
There are many ways to visualize point clouds , Such as open3d、mayavi、pcl、matplotib、cloudcompare etc. , It was introduced in previous blogs . Here the matplotlib Point cloud visualization . If you need to further translate the point cloud , You can refer to the blog before this column .
# -*- coding: utf-8 -*-
"""
The official account of Lele perception school
@author: https://blog.csdn.net/suiyingy
"""
import numpy as np
import open3d as o3d
import matplotlib.pyplot as plt
from copy import deepcopy
def viz_matplot(points):
x = points[:, 0] # x position of point
y = points[:, 1] # y position of point
z = points[:, 2] # z position of point
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(x, # x
y, # y
z, # z
c=z, # height data for color
cmap='rainbow',
marker=".")
ax.axis()
def pcd_rotate_normal(pointcloud, n0, n1):
"""
Parameters
----------
pointcloud : open3d PointCloud, Enter the point cloud
n0 : array, 1x3, Original normal vector
n1 : array, 1x3, Target normal vector
Returns
-------
pcd : open3d PointCloud, Rotate the point cloud
"""
pcd = deepcopy(pointcloud)
n0_norm2 = np.sqrt(sum(n0 ** 2))
n1_norm2 = np.sqrt(sum(n1 ** 2))
theta = np.arccos(sum(n0 * n1) / n0_norm2 / n1_norm2)
r_axis = np.array([n1[2]*n0[1]-n0[2]*n1[1], n0[2]*n1[0]-n1[2]*n0[0], n0[0]*n1[1]-n1[0]*n0[1]])
r_axis = r_axis * theta / np.sqrt(sum(r_axis ** 2))
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(p)
R = pcd.get_rotation_matrix_from_axis_angle(r_axis.T)
pcd.rotate(R)
return pcd
if __name__ == '__main__':
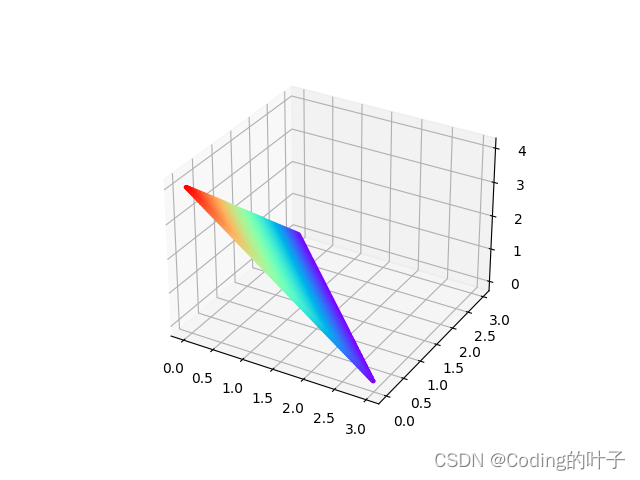
# Generate a plane point cloud
x = np.arange(301).reshape(-1, 1).repeat(100, 0) / 100.
y = np.arange(301).reshape(-1, 1).repeat(100, 1).T.reshape(-1, 1) / 100.
# Plane equation
z = (12 - 4*x -4*y) / 3
p = np.concatenate((x, y, z), 1)
p = p[np.where(p[:,2]>=0)]
viz_matplot(p)
# Original normal vector
n0 = np.array([4, 4, 3])
# Target normal vector
n1 = np.array([0, 0, 1])
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(p)
pcd = pcd_rotate_normal(pcd, n0, n1)
p = np.array(pcd.points)
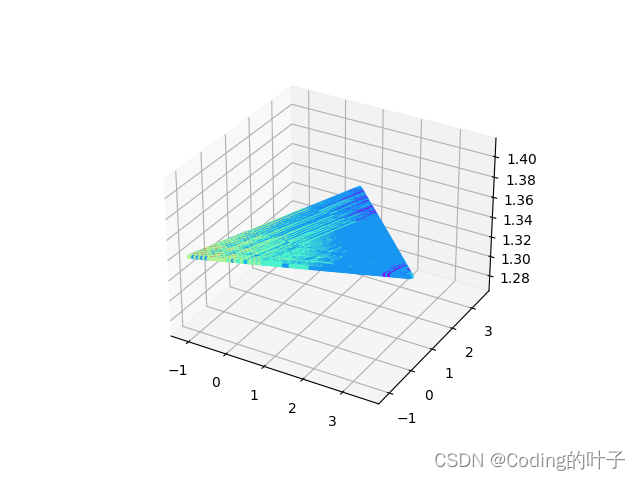
# After rotation z The value of should be basically equal
print('min Z: ', np.min(p[:, -1]), 'max Z: ', np.max(p[:, -1]))
viz_matplot(p)
plt.show()5 Rotation effect
The pictures before and after rotation are shown in the following figure . The target normal vector is (0,0,1), That is to say xoy The plane is vertical , The plane after rotation should be consistent with xoy The plane is parallel .
6 【python Three dimensional deep learning 】python 3D point cloud from basic to deep learning _Coding Leaves blog -CSDN Blog _python Three dimensional point cloud
More 3D 、 Please pay attention to two-dimensional perception algorithm and financial quantitative analysis algorithm “ Lele perception school ” WeChat official account , And will continue to update .
边栏推荐
- C # use gdi+ to add text to the picture and make the text adaptive to the rectangular area
- Baidu R & D suffered Waterloo on three sides: I was stunned by the interviewer's set of combination punches on the spot
- MySQL foundation 02 - installing MySQL in non docker version
- Launpad | Basics
- Luogu deep foundation part 1 Introduction to language Chapter 4 loop structure programming (2022.02.14)
- Summary of the most comprehensive CTF web question ideas (updating)
- PHP book borrowing management system, with complete functions, supports user foreground management and background management, and supports the latest version of PHP 7 x. Database mysql
- 2022-2028 global industrial gasket plate heat exchanger industry research and trend analysis report
- 查看CSDN个人资源下载明细
- Are there any principal guaranteed financial products in 2022?
猜你喜欢

HMS core helps baby bus show high-quality children's digital content to global developers
2022-2028 global gasket plate heat exchanger industry research and trend analysis report

Hands on deep learning (34) -- sequence model
H5 audio tag custom style modification and adding playback control events
Function comparison between cs5261 and ag9310 demoboard test board | cost advantage of cs5261 replacing ange ag9310
MATLAB小技巧(25)竞争神经网络与SOM神经网络

el-table单选并隐藏全选框
自动化的优点有哪些?
2022-2028 global strain gauge pressure sensor industry research and trend analysis report
How does idea withdraw code from remote push
随机推荐
C # use smtpclient The sendasync method fails to send mail, and always returns canceled
Function comparison between cs5261 and ag9310 demoboard test board | cost advantage of cs5261 replacing ange ag9310
After unplugging the network cable, does the original TCP connection still exist?
Summary of the most comprehensive CTF web question ideas (updating)
How do microservices aggregate API documents? This wave of show~
Hands on deep learning (34) -- sequence model
2022-2028 global seeder industry research and trend analysis report
智慧路灯杆水库区安全监测应用
Latex download installation record
Investment analysis and prospect prediction report of global and Chinese high purity tin oxide Market Ⓞ 2022 ~ 2027
Dynamic analysis and development prospect prediction report of high purity manganese dioxide in the world and China Ⓡ 2022 ~ 2027
直方图均衡化
2022-2028 global protein confectionery industry research and trend analysis report
C语言指针面试题——第二弹
Fabric of kubernetes CNI plug-in
Go context 基本介绍
el-table单选并隐藏全选框
Write a jison parser from scratch (5/10): a brief introduction to the working principle of jison parser syntax
Luogu deep foundation part 1 Introduction to language Chapter 4 loop structure programming (2022.02.14)
Svg image quoted from CodeChina