当前位置:网站首页>Driverless learning (III): Kalman filter
Driverless learning (III): Kalman filter
2022-07-02 20:04:00 【biter0088】
1、 Write Kalman filter
Refer to the link below , Give comments on the basis of links , Write the Kalman filter as :kalmanfilter.h
#ifndef KALMAN_FILTER_H
#define KALMAN_FILTER_H
#include "Eigen/Dense"
using namespace std;
class KalmanFilter{// Define a Kalman filter class
public:
//constructor: Is a method for creating and initializing “class Objects created ” Special method
KalmanFilter(){
is_initalized_= false;
};
//destructor Destructor , Contrary to constructors ;
// When an object ends its life cycle , When the function of the object has been called , The system automatically performs the destructor
//~KalmanFilter();
void Initalization(Eigen::VectorXd x_in){
x_= x_in;
is_initalized_= true;
//cout<<"intialized"<<endl;
}
bool IsInitalized(){
return is_initalized_;
}
Eigen::VectorXd GetX(){
return x_;
}
// State transition matrix F_( Set function ):state transistion matrix
// You can give it first F_in assignment , And then call SetF() Function pair state transition matrix F_ Assign a value
void SetF(Eigen::MatrixXd F_in){
F_ = F_in;
}
// State covariance matrix ( Set function ):state covariance matrix
void SetP(Eigen::MatrixXd P_in){
P_ = P_in;
}
// Process noise matrix ( Set function ):process covariance matrix
void SetQ(Eigen::MatrixXd Q_in){
Q_ = Q_in;
}
//x'= Fx + u. Next u Set to 0, That is, the external influence is ignored ( Simplify the model )
//P' = F*P*Ft + Q
void Prediction(){
//cout<<"prediction"<<endl;
x_ = F_ * x_;
//cout<<" Predictive value "<<x_<<endl;
//cout<<" Predictive value F "<<F_<<endl;
Eigen::MatrixXd Ft = F_.transpose();
P_ = F_ * P_ * Ft + Q_;
}
// Measurement matrix :Measurement Matrix
void SetH(Eigen::MatrixXd H_in){
H_ = H_in;
}
// Measurement noise matrix :measurement covariance matrix
void SetR(Eigen::MatrixXd R_in){
R_ = R_in;
}
// forecast -- to update
// y=z-Hx' Actual observations z And the forecast x' Difference between y
// S=H*P*Ht+R S It's a temporary variable
// K=P'*Ht*S.inverse() K: Kalman gain , yes y The weight of the value
void Update(const Eigen::VectorXd &z){
// forecast
Eigen::VectorXd y = z - H_ * x_;
Eigen::MatrixXd S = H_ * P_ * H_.transpose() + R_;
Eigen::MatrixXd K = P_ * H_.transpose()*S.inverse(); // Kalman gain
// to update
x_ = x_+(K*y);// Update the current state vector
//cout<<" Update or get value "<<x_<<endl;
int size = x_.size();// Used to construct identity matrix
Eigen::MatrixXd I = Eigen::MatrixXd::Identity(size, size);
P_ = (I - K*H_)*P_;// Update the uncertainty of the system
}
// Defining parameters
private:
bool is_initalized_;// Whether to initialize
Eigen::VectorXd x_; //state vector State vector
Eigen::MatrixXd F_; // State transition matrix
Eigen::MatrixXd P_; // State covariance
Eigen::MatrixXd Q_; // noise
Eigen::MatrixXd H_; // Measurement matrix
Eigen::MatrixXd R_; // noise
};
#endif
Reference link :
边栏推荐
- B端电商-订单逆向流程
- Common problems and description of kt148a voice chip IC development
- 自动生成VGG图像注释文件
- AcWing 181. Turnaround game solution (search ida* search)
- 高并发下如何避免产生重复数据?
- B-end e-commerce - reverse order process
- SQLite 3.39.0 release supports right external connection and all external connection
- Jetson XAVIER NX上ResUnet-TensorRT8.2速度與顯存記錄錶(後續不斷補充)
- CRM客户关系管理系统
- Overview of browser caching mechanism
猜你喜欢
外包干了三年,废了...

After writing 100000 lines of code, I sent a long article roast rust
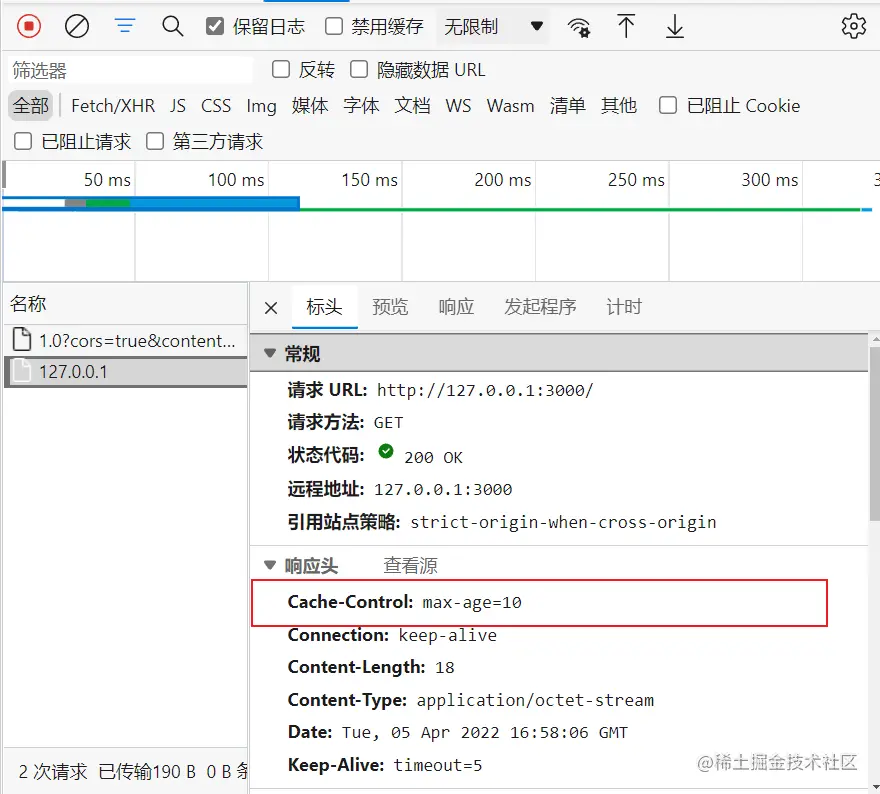
浏览器缓存机制概述
![[NLP] a detailed generative text Abstract classic paper pointer generator](/img/d8/a367c26b51d9dbaf53bf4fe2a13917.png)
[NLP] a detailed generative text Abstract classic paper pointer generator
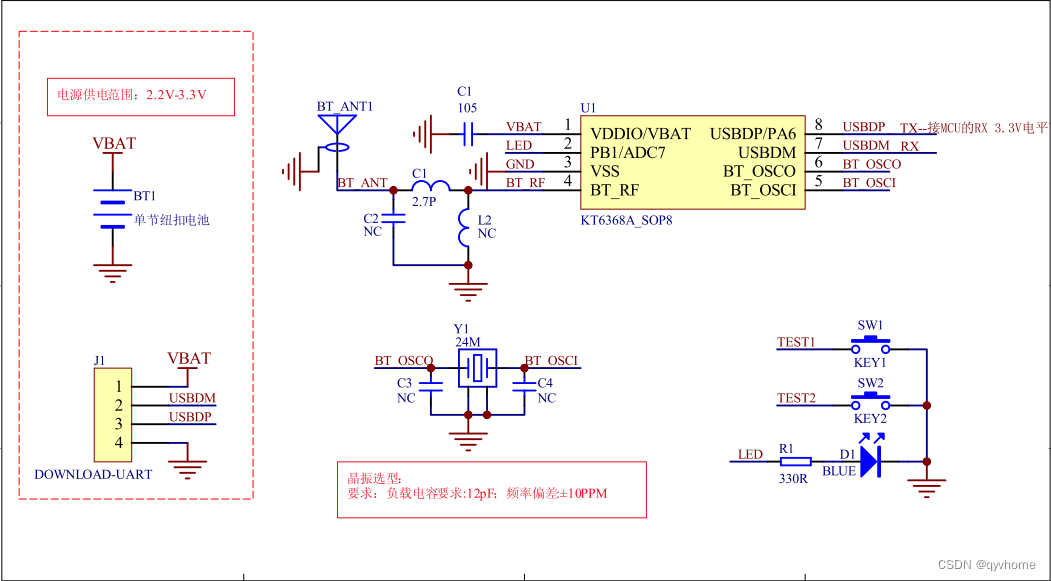
蓝牙芯片ble是什么,以及该如何选型,后续技术发展的路径是什么

CRM Customer Relationship Management System

面试经验总结,为你的offer保驾护航,满满的知识点
Yes, that's it!

How to realize the function of detecting browser type in Web System

Self-Improvement! Daliangshan boys all award Zhibo! Thank you for your paper
随机推荐
In depth understanding of modern web browsers (I)
API文档工具knife4j使用详解
rxjs Observable 自定义 Operator 的开发技巧
Kt148a voice chip IC software reference code c language, first-line serial port
How to do interface testing? After reading this article, it will be clear
Outsourcing for three years, abandoned
Postman接口测试实战,这5个问题你一定要知道
Génération automatique de fichiers d'annotation d'images vgg
From 20s to 500ms, I used these three methods
Yes, that's it!
Use IDM to download Baidu online disk files (useful for personal testing) [easy to understand]
[source code analysis] model parallel distributed training Megatron (5) -- pipestream flush
数据库模式笔记 --- 如何在开发中选择合适的数据库+关系型数据库是谁发明的?
Detailed explanation of VBScript (I)
Shardingsphere jdbc5.1.2 about select last_ INSERT_ ID () I found that there was still a routing problem
有时候只查询一行语句,执行也慢
【Hot100】23. 合并K个升序链表
浏览器缓存机制概述
【Hot100】21. Merge two ordered linked lists
Dictionaries