当前位置:网站首页>(9) Opencv Canny edge detection
(9) Opencv Canny edge detection
2022-07-03 17:45:00 【Hengyoucheng】
1. Basic principle
Reference from 《 Digital image processing 》 Chapter ten
And OpenCV Tutorial Canny Edge Detector
1.1 Overview of edge detection
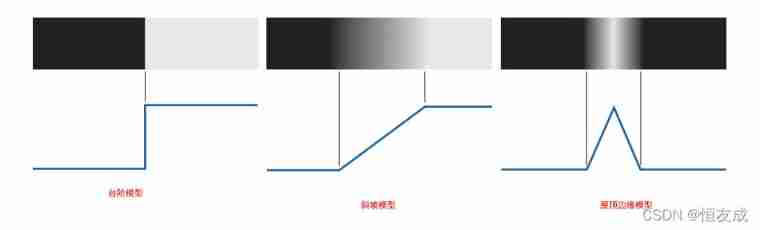
Edge detection is a common method to segment an image according to gray mutation . Edge models can be classified according to their gray Profile , Usually divided into step model , Slope model and roof edge model . Step models are often found in computer-generated images , Such as solid modeling and animation . Most of the actual images are slope edge models . When using two-step degree to obtain image edge , The second derivative will produce a local maximum positive value and a local minimum negative value , Reflected in the image as a bilinear effect .

1.2Canny edge detection
1986 Year by year John F. Canny stay A computational approach to edge detection. It is proposed that ,Canny The algorithm is mainly divided into the following steps :
- Use Gaussian kernel to smooth the input image
- Calculate gradient amplitude image and angle image
- Apply non maximum suppression to gradient amplitude images
- Use double threshold processing and connectivity analysis to detect and connect edges
Discuss separately ,
Gaussian kernel smoothing image denoising
Calculate the gradient amplitude diagram and gradient direction diagram , Make
f(x,y)Represents the input image , The gradient amplitude and direction are :
M ( x , y ) = ∣ ∣ ▽ f ( x , y ) ∣ ∣ = g x 2 ( x , y ) + g y 2 ( x , y ) M(x,y)=||\triangledown f(x,y)||=\sqrt{g_x^2(x,y)+g_y^2(x,y)} M(x,y)=∣∣▽f(x,y)∣∣=gx2(x,y)+gy2(x,y)
α ( x , y ) = a r c t a n [ g y ( x , y ) g x ( x , y ) ] \alpha(x,y)=arctan[\frac{g_y(x,y)}{g_x(x,y)}] α(x,y)=arctan[gx(x,y)gy(x,y)],
among , g x ( x , y ) = ∂ f ( x , y ) ∂ x g_x(x,y)=\frac{\partial f(x,y)}{\partial x} gx(x,y)=∂x∂f(x,y), g y ( x , y ) = ∂ f ( x , y ) ∂ y g_y(x,y)=\frac{\partial f(x,y)}{\partial y} gy(x,y)=∂y∂f(x,y), You can use ( 7、 ... and ) Operators commonly used in image processing Laplacian\Sobel\Roberts\Prewitt\Kirsch To find g x ( x , y ) g_x(x,y) gx(x,y) and g y ( x , y ) g_y(x,y) gy(x,y).Apply non maximum suppression to gradient amplitude images , Gradient image ∣ ∣ ▽ f ( x , y ) ∣ ∣ ||\triangledown f(x,y)|| ∣∣▽f(x,y)∣∣ It usually contains some wide ridges near the local maximum , You can use non maximum suppression to refine these wide ridges . In a
3x3In the area , Can define 4 Edge normals ( Gradient vector ) Of 4 A direction , level , vertical ,+45 degree , -45 degree , The angle range in each direction is shown in the figure below ,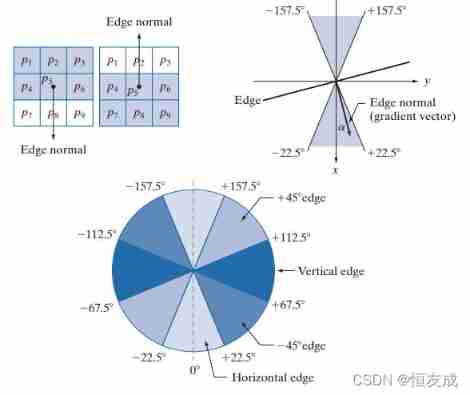
Use d 1 , d 2 , d 3 , d 4 d_1,d_2,d_3,d_4 d1,d2,d3,d4 Represents the foregoing 3x3 Regional 4 Basic edge directions , To α \alpha α Any point in ( x , y ) (x,y) (x,y) Centred 3x3 Area , The corresponding non maximum suppression scheme is :
- 1) seek α ( x , y ) \alpha(x,y) α(x,y) The direction of d k d_k dk
- 2) Make K Express ∣ ∣ ▽ f ∣ ∣ ||\triangledown f|| ∣∣▽f∣∣ stay ( x , y ) (x,y) (x,y) Place the value of the . if K Less than d k d_k dk Point in the direction (x,y) At one or two adjacent points of ∣ ∣ ▽ f ∣ ∣ ||\triangledown f|| ∣∣▽f∣∣ value , Then order g N ( x , y ) = 0 g_N(x,y)=0 gN(x,y)=0; otherwise , Make g N ( x , y ) = K g_N(x,y)=K gN(x,y)=K
Yes (x,y) Repeat this process for all values of , Get a picture with f ( x , y ) f(x,y) f(x,y) Non maximum suppression image with the same size g N ( x , y ) g_N(x,y) gN(x,y), Images g N ( x , y ) g_N(x,y) gN(x,y) Only the refined edges are included in .
- Use double threshold processing and connectivity analysis to detect and connect edges , obtain g N ( x , y ) g_N(x,y) gN(x,y) After that, threshold processing is carried out to obtain the edge .
CannyThe algorithm uses lag threshold processing , Set two thresholds , Low threshold T L T_L TL And high threshold T H T_H TH. The hysteresis threshold operation can be regarded as creating two additional images :
g N H ( x , y ) = g N ( x , y ) ≥ T H g_{NH}(x,y)=g_N(x,y)\ge T_H gNH(x,y)=gN(x,y)≥TH
g N L ( x , y ) = g N ( x , y ) ≥ T L g_{NL}(x,y)=g_N(x,y)\ge T_L gNL(x,y)=gN(x,y)≥TL
And g N L ( x , y ) g_{NL}(x,y) gNL(x,y) comparison g N H ( x , y ) g_{NH}(x,y) gNH(x,y) Non zero values are less , g N H ( x , y ) g_{NH}(x,y) gNH(x,y) All non-zero pixels in g N L ( x , y ) g_{NL}(x,y) gNL(x,y) in , adopt
g N L ( x , y ) = g N L ( x , y ) − g N H ( x , y ) g_{NL}(x,y) = g_{NL}(x,y) - g_{NH}(x,y) gNL(x,y)=gNL(x,y)−gNH(x,y) from g N L ( x , y ) g_{NL}(x,y) gNL(x,y) Delete from g N H ( x , y ) g_{NH}(x,y) gNH(x,y) Non zero pixels of . After the above reduction g N L ( x , y ) g_{NL}(x,y) gNL(x,y) and g N H ( x , y ) g_{NH}(x,y) gNH(x,y) respectively “ weak ” Edge pixels and “ strong ” Edge pixels . g N H ( x , y ) g_{NH}(x,y) gNH(x,y) The edge pixels in are assumed to be valid edge pixels , But it usually has cracks , It is usually necessary to form longer edges by the following treatment :- 1) stay g N H ( x , y ) g_{NH}(x,y) gNH(x,y) Locate the next edge pixel that is not accessed p
- 2) take g N L ( x , y ) g_{NL}(x,y) gNL(x,y) China and p 8 All weak pixels in the connected domain are marked as effective edge pixels
- 3) if g N H ( x , y ) g_{NH}(x,y) gNH(x,y) All non-zero pixels in have been accessed , Go to 4, Otherwise return to 1
- 4) take g N L ( x , y ) g_{NL}(x,y) gNL(x,y) All pixels in that are not marked as valid edge pixels are set to 0
Go through the above steps , take g N L ( x , y ) g_{NL}(x,y) gNL(x,y) All non-zero pixels in are appended to g N H ( x , y ) g_{NH}(x,y) gNH(x,y) On , formationCannyThe final image output by the operator .
2.OpenCV API
void cv::Canny (
InputArray image,
OutputArray edges,
double threshold1,
double threshold2,
int apertureSize = 3,
bool L2gradient = false
)
image: Single channel grayscaleedges: Store images of edge pixelsthreshold1: Super parameter of hysteresis threshold processingthreshold2: Super parameter of hysteresis threshold processingapertureSize: UseSobelThe convolution kernel size of the operatorL2gradient: Whether to use L 2 L_2 L2 norm
3. Example
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgcodecs.hpp>
#include <iostream>
using namespace std;
using namespace cv;
Mat src, src_gray;
Mat dst, detected_edges;
int low_threshold = 0;
const int max_low_threshold = 100;
const int ratio = 3;
const int ks = 3;
const char *win_name = "Canny Edge Map";
static void CannyThreshold(int, void*)
{
blur(src_gray, detected_edges, Size(3,3));
Canny(detected_edges, detected_edges, low_threshold, low_threshold*ratio, ks);
dst = Scalar::all(0);
src.copyTo(dst, detected_edges);
imshow(win_name, dst);
imwrite("seg_res.png", dst);
}
int main(int argc, char **argv)
{
CommandLineParser parser( argc, argv, "{@input | fruits.jpg | input image}" );
src = imread( samples::findFile( parser.get<String>( "@input" ) ), IMREAD_COLOR ); // Load an image
if( src.empty() )
{
std::cout << "Could not open or find the image!\n" << std::endl;
std::cout << "Usage: " << argv[0] << " <Input image>" << std::endl;
return -1;
}
dst.create( src.size(), src.type() );
cvtColor( src, src_gray, COLOR_BGR2GRAY );
namedWindow( win_name, WINDOW_AUTOSIZE);
createTrackbar( "Min Threshold:", win_name, &low_threshold, max_low_threshold, CannyThreshold );
CannyThreshold(0, 0);
waitKey(0);
return 0;
}

边栏推荐
- Assignment examination questions of advanced English (III) for the course examination of Fujian Normal University in February 2022
- 互聯網醫院HIS管理平臺源碼,在線問診,預約掛號 智慧醫院小程序源碼
- AcWing 3438. Number system conversion
- 自动渗透测试工具核心功能简述
- Hongmeng fourth training
- What is the difference between cloud server and cloud virtual machine
- MySQL grouping query
- Where is the database account used when running SQL tasks in data warehouse tasks configured
- Select 3 fcpx plug-ins. Come and see if you like them
- 企业级自定义表单引擎解决方案(十一)--表单规则引擎1
猜你喜欢

TCP拥塞控制详解 | 3. 设计空间

IntelliJ 2021.3 short command line when running applications

How to deploy applications on kubernetes cluster

Research Report on investment trends and development planning of China's thermal insulation material industry, 2022-2028
Implementation of Tetris in C language

Collection of the most beautiful graduation photos in the graduation season, collection of excellent graduation photos

PS screen printing brush 131, many illustrators have followed suit

QT学习日记9——对话框
MySQL has been stopped in the configuration interface during installation

SQL injection database operation foundation
随机推荐
[combinatorics] recursive equation (summary of the solution process of recursive equation | homogeneous | double root | non-homogeneous | characteristic root is 1 | exponential form | the bottom is th
Life perception 1
Notes on problems -- watching videos on edge will make the screen green
Design e-commerce spike
STM32 realizes 74HC595 control
1146_ SiCp learning notes_ exponentiation
基于人脸识别的课堂考勤系统 tkinter+openpyxl+face_recognition
Comparison of kotlin collaboration + retro build network request schemes
AcWing 4489. 最长子序列
Luogu: p2685 [tjoi2012] Bridge
QT adjust win screen brightness and sound size
Internet hospital his management platform source code, online consultation, appointment registration smart hospital applet source code
Loop through JSON object list
Talk about the design and implementation logic of payment process
数学公式(测试)
How to train mask r-cnn model with your own data
Assignment examination questions of advanced English (III) for the course examination of Fujian Normal University in February 2022
How to purchase Google colab members in China
AcWing 3438. Number system conversion
Research on Swift