当前位置:网站首页>[follow Jiangke University STM32] stm32f103c8t6_ PWM controlled DC motor_ code
[follow Jiangke University STM32] stm32f103c8t6_ PWM controlled DC motor_ code
2022-07-07 15:06:00 【Related to the sun_】
Code :
PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init();
void PWM_SetCompare3(uint16_t Compare);
#endif
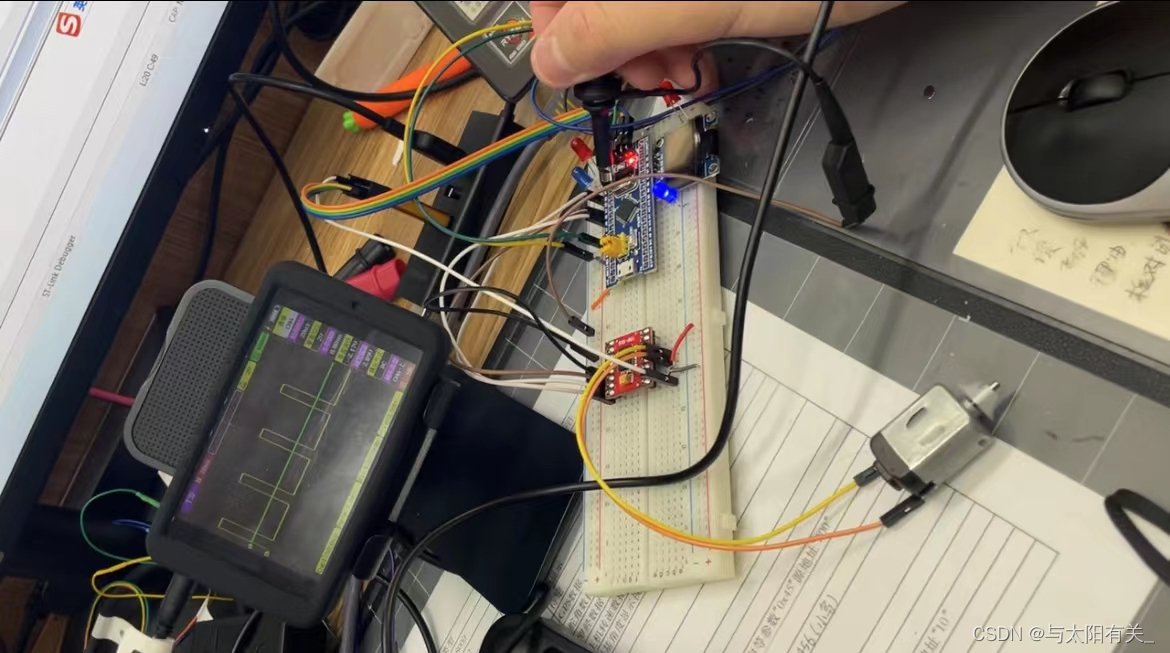
Inside the motor Coil and magnet , So in PWM Driven by , The buzzer will sound
When the SCM is set PWM When the frequency is within the range that our human ears can receive , We press and hold the rotating motor , You will hear an obvious buzzing ( The sound of buzzer )
Methods of elimination : enlarge PWM frequency , When PWM When the frequency is large enough , Beyond the scope of human ears , I can't hear it .Reduce prescaler , This will not affect the duty cycle
The radio frequency range of the human ear :20Hz To 20kHz.
It is amended as follows :TIM_TimeBaseInitStructure.TIM_Prescaler =36- 1; // The frequency changes to 20kHz
PWM.c
#include "stm32f10x.h" // Device header
void PWM_Init()
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); // Turn on timer 2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// passageway 2 Clock enable function
GPIO_InitTypeDef GPIO_InitStructure; // Definition GPIO Initializing structure variables
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // Set up GPIO For push-pull output mode
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // The speed is set to 50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); // Proceed according to the above parameters GPIO The initialization
TIM_InternalClockConfig(TIM2);//TIM The time base unit of is controlled by the internal clock
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR The value of the automatic reloader
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC Prescaler value Yes 72M(720000000) Conduct 720 frequency division namely 1K At different frequencies meter 1000 Number 1s Time for
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;// Repeat counter value
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;// Output polarity selection
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;// Output status enable
TIM_OCInitStructure.TIM_Pulse = 10;//CCR, That is, the duty cycle is 10%
TIM_OC3Init(TIM2,&TIM_OCInitStructure);
TIM_Cmd(TIM2,ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare);
}
Motor.h
#ifndef __MOTOR_H
#define __MOTOR_H
void Motor_Init();
void Motor_SetSpeed(int8_t Speed);
#endif
Motor.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Motor_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// passageway 2 Clock enable function
GPIO_InitTypeDef GPIO_InitStructure; // Definition GPIO Initializing structure variables
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; // Set up GPIO For push-pull output mode
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;// Motor direction control foot
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // The speed is set to 50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); // Proceed according to the above parameters GPIO The initialization
PWM_Init();
}
void Motor_SetSpeed(int8_t Speed)
{
if(Speed >= 0) // Positive rotation ( Turn clockwise )
{
GPIO_SetBits(GPIOA, GPIO_Pin_4);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
PWM_SetCompare3(Speed);
}
else// reverse ( Turn counter clockwise )
{
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
GPIO_SetBits(GPIOA, GPIO_Pin_5);
PWM_SetCompare3(-Speed);
}
}
main.c
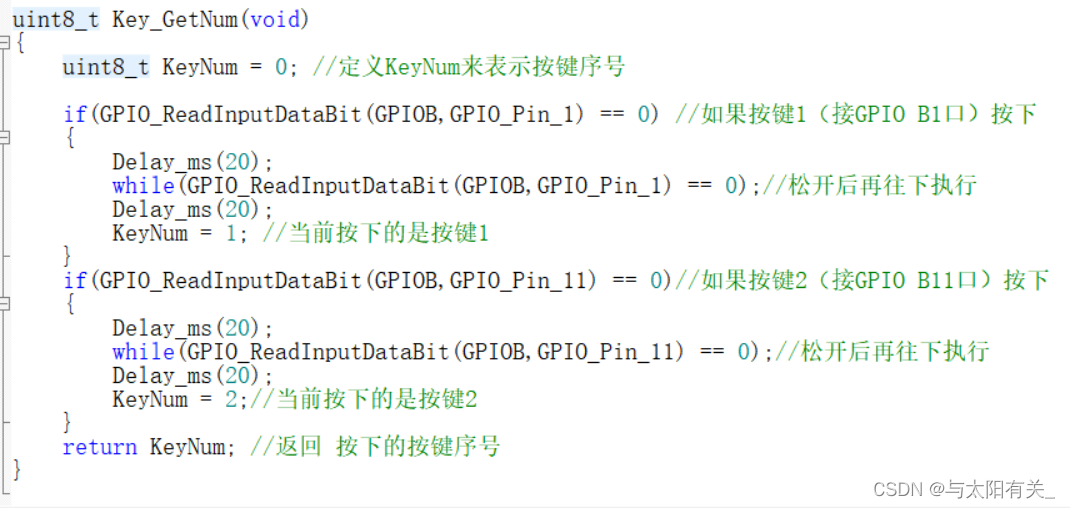
Press the key to control the motor speed
Code here shows KeyNum = Key_GetNum(); What you get isB1Pin value , So I put the button on this foot .
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
#include "OLED.H"
#include "Motor.H"
uint8_t KeyNum,Speed;;
int main(void)
{
OLED_Init();
Motor_Init();
Key_Init();
OLED_ShowString(1,1,"Speed:");
while (1)
{
KeyNum = Key_GetNum();
if(KeyNum == 1)
{
Speed += 20;
if(Speed > 100)
{
Speed = -100;
}
}
Motor_SetSpeed(Speed);
OLED_ShowNum(1,7,Speed,3);
}
}
Work hard Grow slowly
边栏推荐
- Lidar knowledge drops
- CTFshow,信息搜集:web4
- Zhiting doesn't use home assistant to connect Xiaomi smart home to homekit
- CTFshow,信息搜集:web3
- Discussion on CPU and chiplet Technology
- Niuke real problem programming - Day11
- Webrtc audio anti weak network technology (Part 1)
- Ascend 910 realizes tensorflow1.15 to realize the Minist handwritten digit recognition of lenet network
- Apache多个组件漏洞公开(CVE-2022-32533/CVE-2022-33980/CVE-2021-37839)
- 简述keepalived工作原理
猜你喜欢

CTFshow,信息搜集:web8

In the field of software engineering, we have been doing scientific research for ten years!

Change win10 Screensaver

Ctfshow, information collection: web7

拜拜了,大厂!今天我就要去厂里
How to enable radius two factor / two factor (2fa) identity authentication for Anheng fortress machine
Navigation — 这么好用的导航框架你确定不来看看?
Apache multiple component vulnerability disclosure (cve-2022-32533/cve-2022-33980/cve-2021-37839)

JSON解析实例(Qt含源码)
![leetcode:648. Word replacement [dictionary tree board + find the shortest matching prefix among several prefixes]](/img/3e/cdde4b436821af8700eb65d35e8f59.png)
leetcode:648. Word replacement [dictionary tree board + find the shortest matching prefix among several prefixes]
随机推荐
PG基础篇--逻辑结构管理(锁机制--表锁)
Cocoscreator operates spine for animation fusion
最安全的证券交易app都有哪些
Read PG in data warehouse in one article_ stat
Deformable convolutional dense network for enhancing compressed video quality
Find your own value
Qu'est - ce qu'une violation de données
Lidar Knowledge Drop
IDA pro逆向工具寻找socket server的IP和port
What is cloud primordial? This time, I can finally understand!
Niuke real problem programming - Day17
JSON parsing instance (QT including source code)
Apache multiple component vulnerability disclosure (cve-2022-32533/cve-2022-33980/cve-2021-37839)
leetcode 241. Different Ways to Add Parentheses 为运算表达式设计优先级(中等)
Ctfshow, information collection: web6
What is the process of ⼀ objects from loading into JVM to being cleared by GC?
CTFshow,信息搜集:web5
Data Lake (IX): Iceberg features and data types
什麼是數據泄露
Niuke real problem programming - day13