当前位置:网站首页>Three dimensional reconstruction of deep learning
Three dimensional reconstruction of deep learning
2022-07-03 15:40:00 【Name of algorithm】
be based on MVS Foundation of 3D reconstruction
Three dimensional information representation
It is generally divided into depth map / Parallax map 、 Point cloud 、 grid . They are all expressions 3D A way of information , We will choose different ways to express according to different actual application scenarios . For example, do some background sequencing 、 Face effects can only use depth maps ; And if we want to rebuild a large scene , Such as museums , It needs to be displayed for everyone to browse , You can use grids to represent ; When positioning , We just need to use some clouds . But if we want to make point clouds or grids , Must use depth map , This step must be experienced . Only with depth map can we get point cloud or three-dimensional grid .
- Depth map / Parallax map
- Depth map : The distance from each point in the scene to the camera ;
- Parallax map : The position deviation of pixels imaged under two cameras in the same scene dis
- Relationship between them :depth=bf/dis
- It is a common representation of three-dimensional information
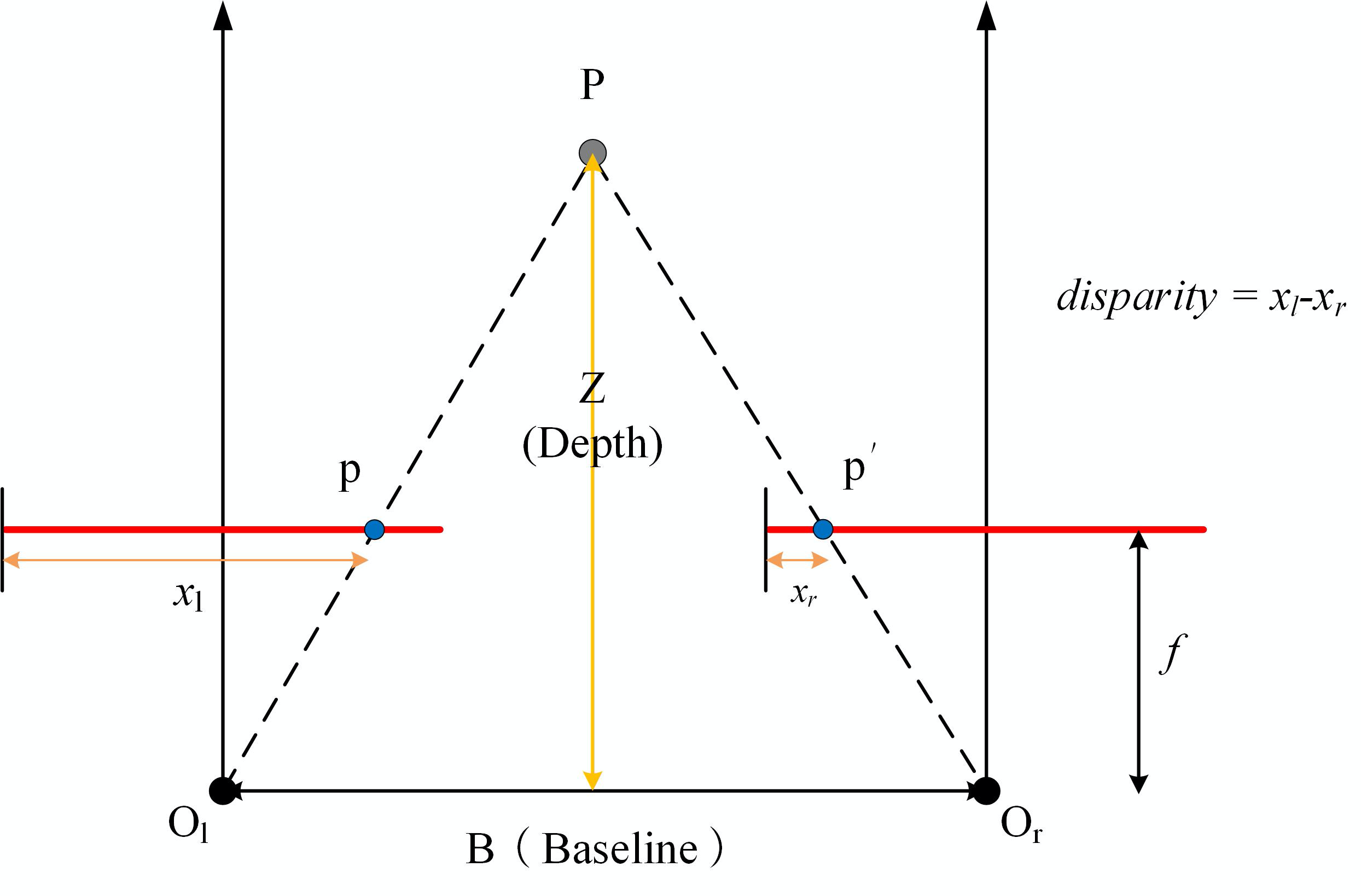
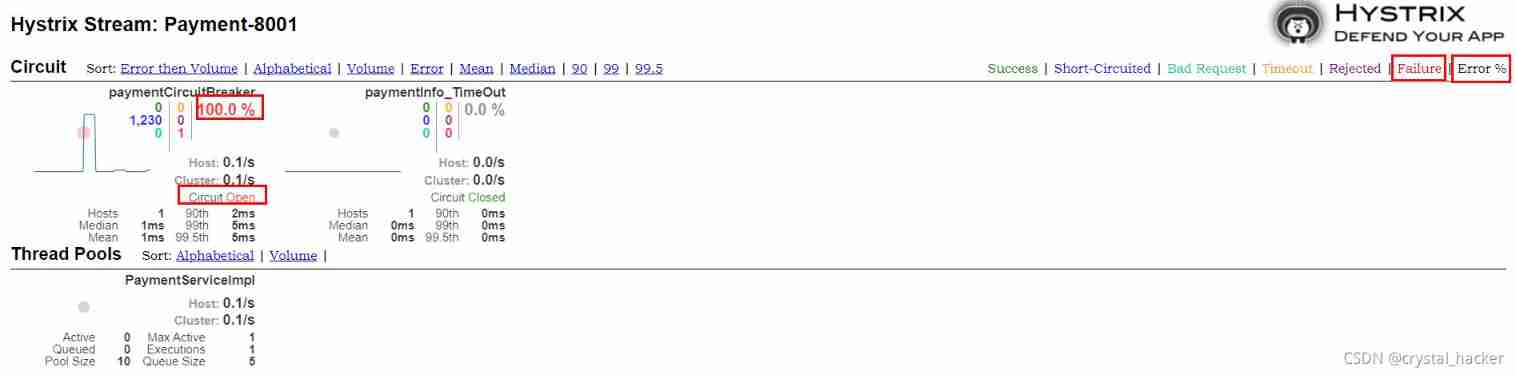
In the diagram above ,Ol and Or It's two cameras , We generally call it binocular camera , The distance between them is called the baseline (Baseline). A point in space P, The distance from it to the baseline Z It's called depth . The two red lines in the above figure are different imaging of two cameras .p Point and p' The difference is P stay Ol and Or Points in camera imaging . parallax d Equal to the column coordinates of the same point pair in the left view minus the column coordinates in the right view , yes Pixel unit
![]()
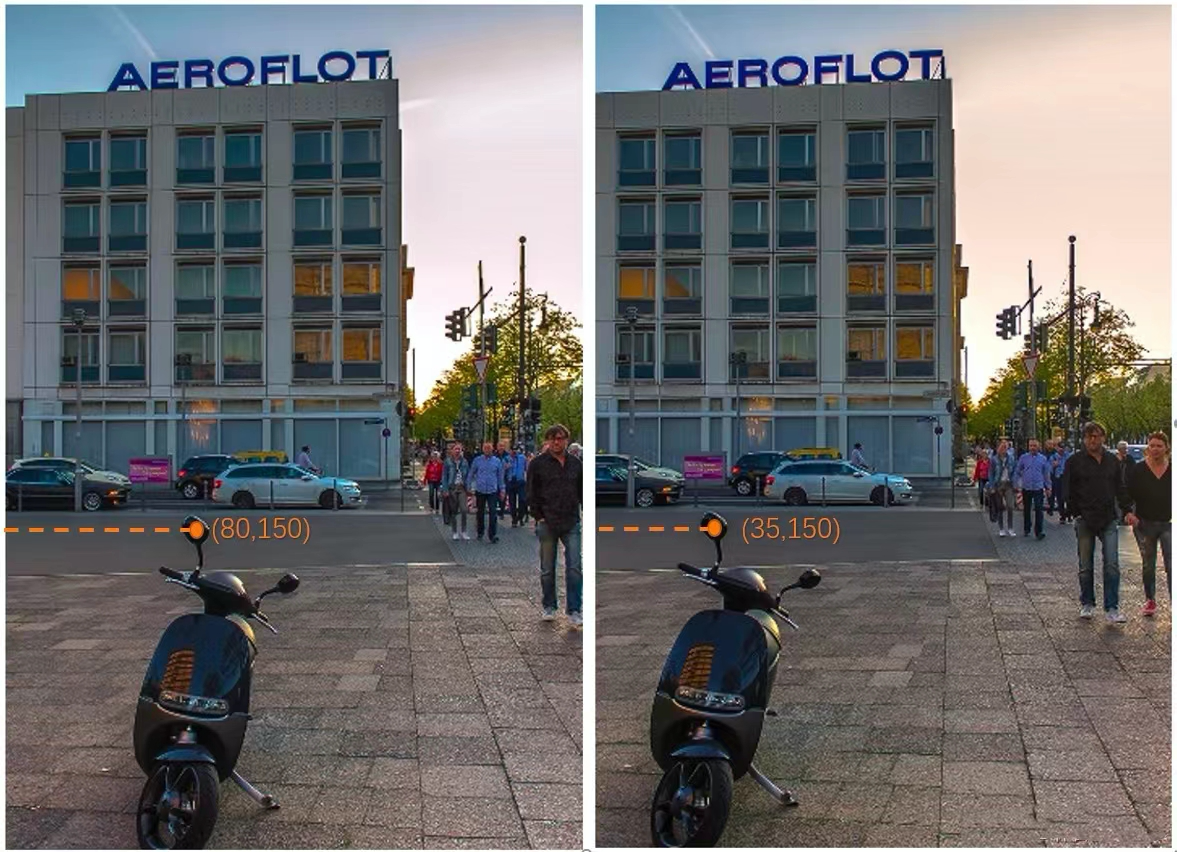
The above picture is taken by binocular camera , The parallax of the electric rearview mirror is 80-35=45.
In stereovision , The parallax concept is used in baseline corrected image pairs . That is to say, the two cameras are right , parallel , They all shoot objects forward , Only then can the parallax map be used . Generally speaking, we use depth maps , Parallax map is easier to shoot , Then convert it into a depth map . Parallax is measured in pixels , The unit of depth is mm (mm), Change the formula to depth=bf/dis, here b Is the baseline distance of the binocular camera , This is known ,f Represents the normalized focal length , That is, in the internal parameter fx, This is also known ,dis Is the parallax value .
- Three dimensional point cloud
- A 3D point cloud is a data set of points in a coordinate system
- Contains a wealth of information , Including three-dimensional coordinates XYZ, Color RGB Etc
3D point cloud is actually data , It can be viewed intuitively without showing to human beings .
- Three dimensional grid
- It is composed of polygons composed of adjacent point clouds of objects .
- Usually consists of triangles 、 Quadrilateral or other simple convex polygons .

As can be seen from the above figure , 3D mesh is a form of point cloud , It is generally without color information .
- Texture map model
- 3D mesh model with color information
- All color information is stored on a texture map , When displaying, the high-resolution color model is rendered according to the texture coordinates of each mesh and the corresponding texture map .

Image coordinate system 、 Camera coordinate system 、 World coordinate system
边栏推荐
- Dataframe returns the whole row according to the value
- CString在多线程中的问题
- 分布式事务(Seata) 四大模式详解
- Vs2017 is driven by IP debugging (dual machine debugging)
- Qt常用语句备忘
- The markdown file obtains the pictures of the network and stores them locally and modifies the URL
- Halcon与Winform学习第一节
- Backtracking method to solve batch job scheduling problem
- Microservice API gateway
- 找映射关系
猜你喜欢






随机推荐
找映射关系
自定义注解
驱动与应用程序通信
Visual upper system design and development (Halcon WinForm) -5 camera
详解指针进阶1
App mobile terminal test [5] file writing and reading
《微服务设计》读书笔记(下)
Calibre LVL
Jvm-09 byte code introduction
Unity function - unity offline document download and use
Concurrency-01-create thread, sleep, yield, wait, join, interrupt, thread state, synchronized, park, reentrantlock
Kubernetes advanced training camp pod Foundation
Intelij idea efficient skills (III)
Halcon and WinForm study section 1
Matlab r2011b neural network toolbox precautions
Popular understanding of ovo and ovr
UnityShader——MaterialCapture材质捕捉效果 (翡翠斧头)
Jvm-06-execution engine
Shell script import and export data
Detailed explanation of string function and string function with unlimited length