当前位置:网站首页>SLAM 04.视觉里程计-1-相机模型
SLAM 04.视觉里程计-1-相机模型
2022-08-04 13:41:00 【平原君2088】
相机模型是理解视觉里程计之前的基础。本文主要是对高翔博士的《SLAM十四讲》的总结。
视觉里程计就是要根据相机拍摄的多幅图像估计出机器人当前的位置,然后再重建地图。
单目相机
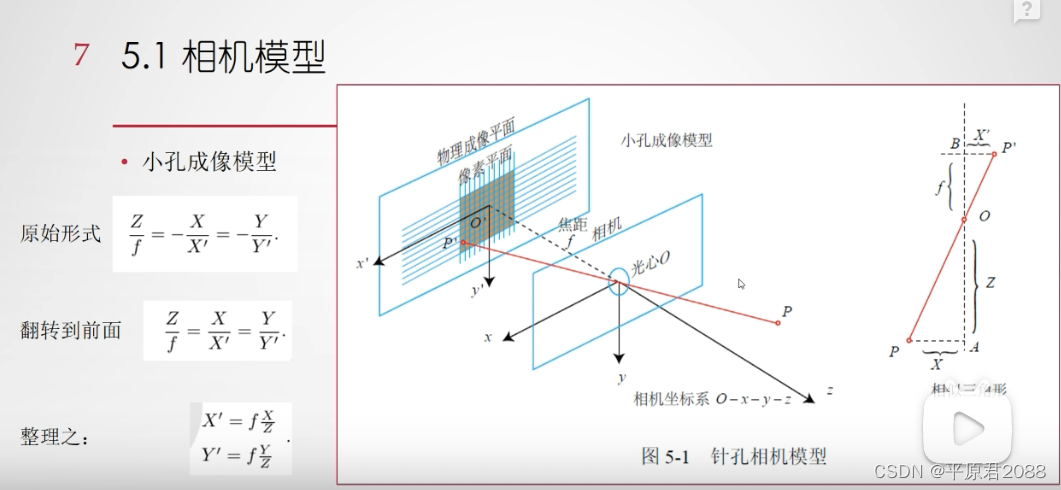
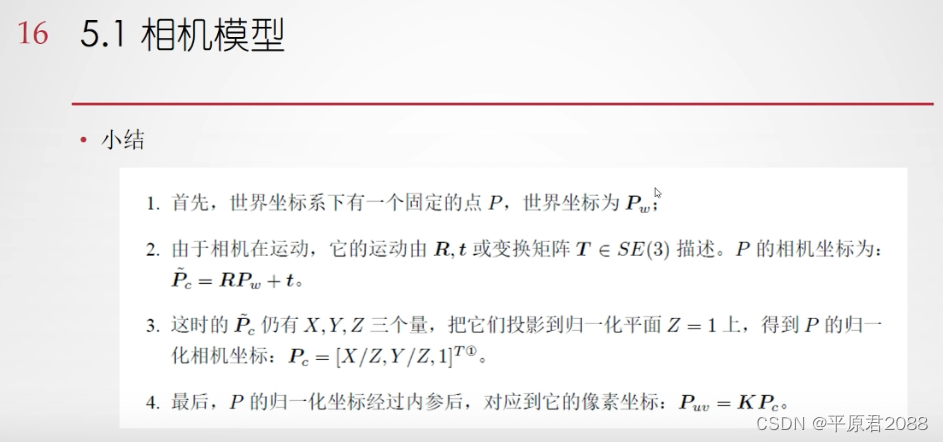
相机模型里涉及到如下几个坐标:空间坐标、物理成像坐标、像素坐标。
这些坐标之间存在映射关系,并且受相机内参的影响,例如相机焦距,相机成像原点位置,感光片安装的时候没垂直,而是有一个偏角。内参是出厂的时候固定的,数学里表现为内参矩阵。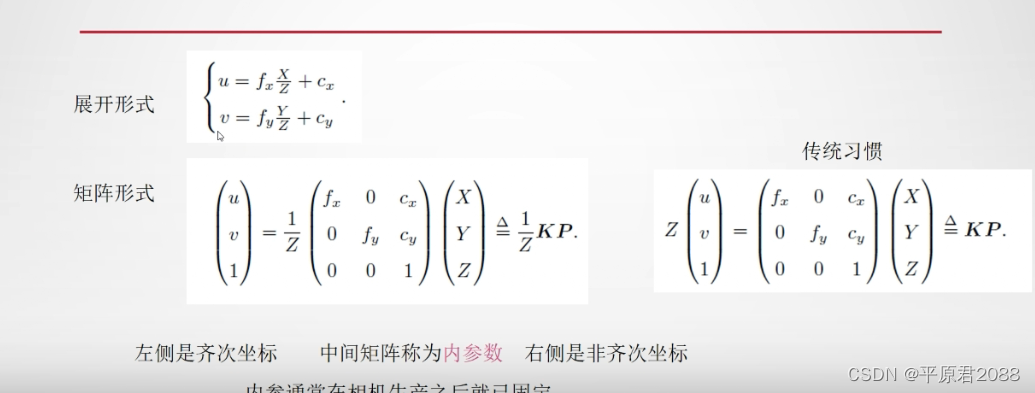
这图中的齐次是为了和三维的XYZ对齐,为了方便计算。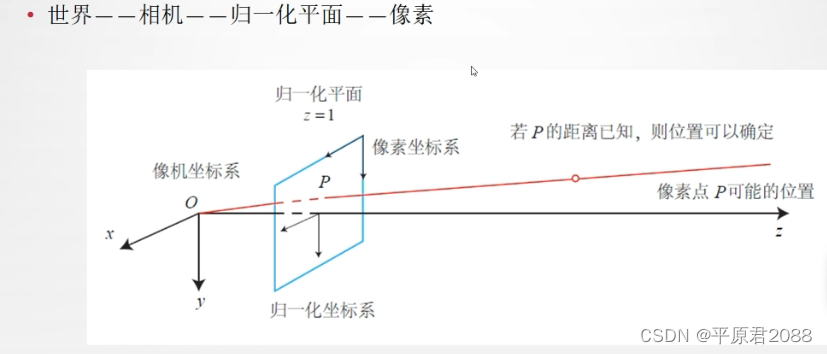
后面的传统习惯,就是左侧投影方式,右侧是内参乘以像素空间坐标。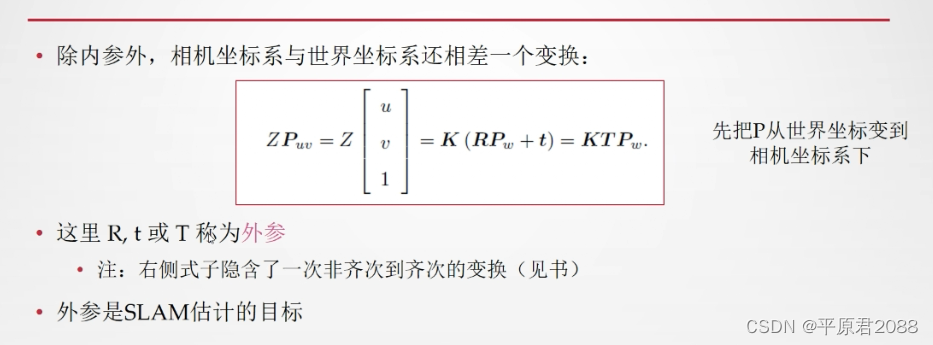
还需从世界坐标到像素坐标进行变换,这里就是进行了旋转矩阵和平移。
上图是采用是四元组的方式。而K、T称为外参。这个外参是SLAM估计的目标。
除了小孔成像之外,还要考虑镜头的畸变。例如凸透镜有一个光线的弯曲。例如鱼眼镜头,视觉很广可以达到180度,但是也容易引起畸变。
畸形的分类: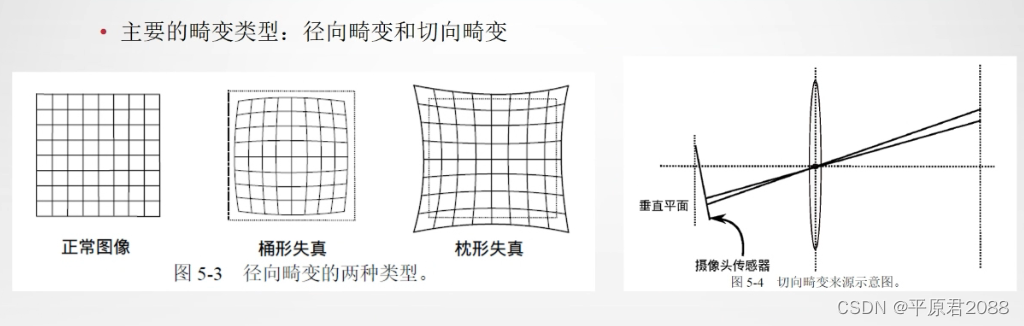
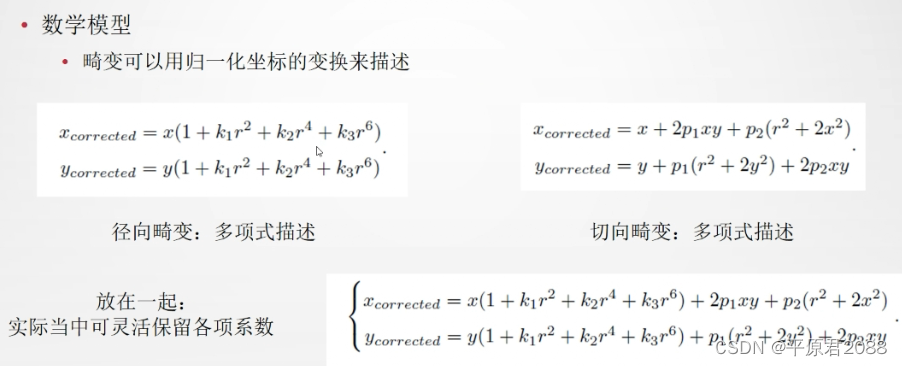
如果有畸变,则在3、4之间处理。
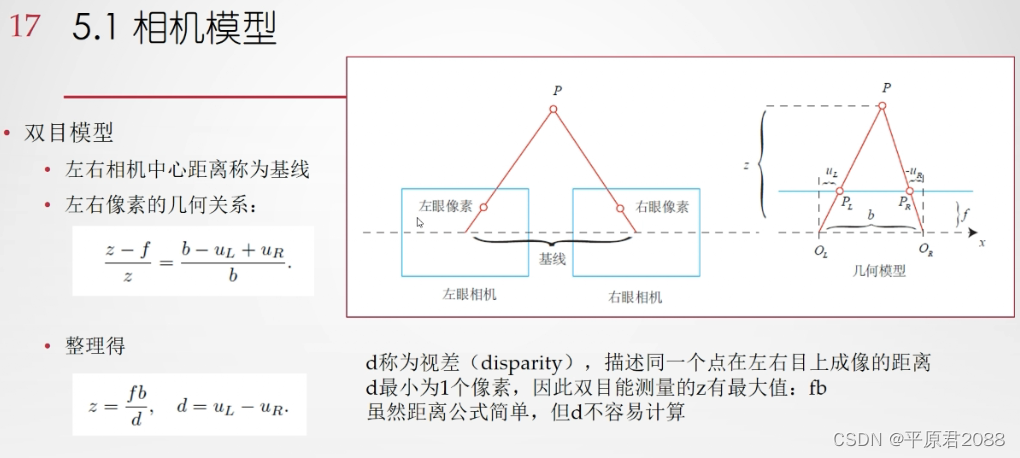
双目相机
深度相机
双目是通过计算来得到深度,但是深度相机通过物理测量直接得到深度,效率和效果要好得多。通常采用结构光和TOF方式。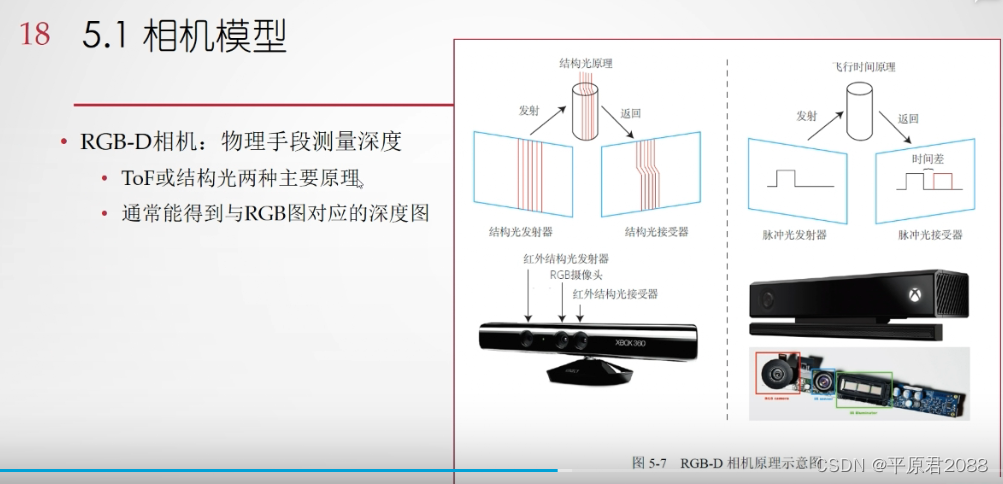
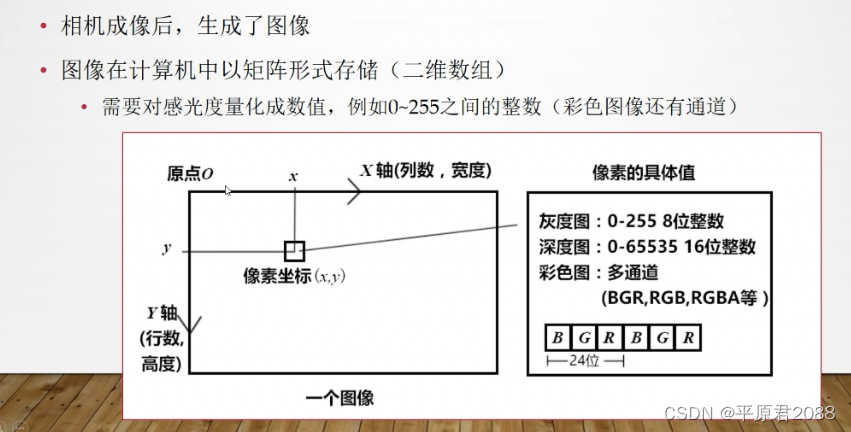
深度图像的存储。
这是一个位置文件,每一行:前三者是xyz,后面是四元素表示的位姿。
这里提供了一个程序,根据五对彩色图和深度图,重构点云。 也就是从相机坐标得到世界坐标x、y、z。
边栏推荐
- nVisual secondary development - Chapter 2 nVisual API operation guide Swagger use
- Ceres库运行,模板内报内存冲突问题。(已解决)
- router---mode
- sqlplus报错ORA-12547: TNS:lost contact解决
- redisTemplate存取List遇到的坑
- 【毕设选题推荐】机器人工程专业毕设选题推荐
- php中的ceil和floo以及round函数「建议收藏」
- ssm学习心得(完结篇
- 【WeChat Mini Program】Social Internship Production Project for Information Management and Information System Major--Trash Fingerprint
- 用过Apifox这个API接口工具后,确实感觉postman有点鸡肋......
猜你喜欢

【WeChat Mini Program】Social Internship Production Project for Information Management and Information System Major--Trash Fingerprint

PMP每日一练 | 考试不迷路-8.4(包含敏捷+多选)

做项目管理有且有必要了解并学习的重要知识--PMP项目管理
未来已来,只是尚未流行
相似文本聚类与调参
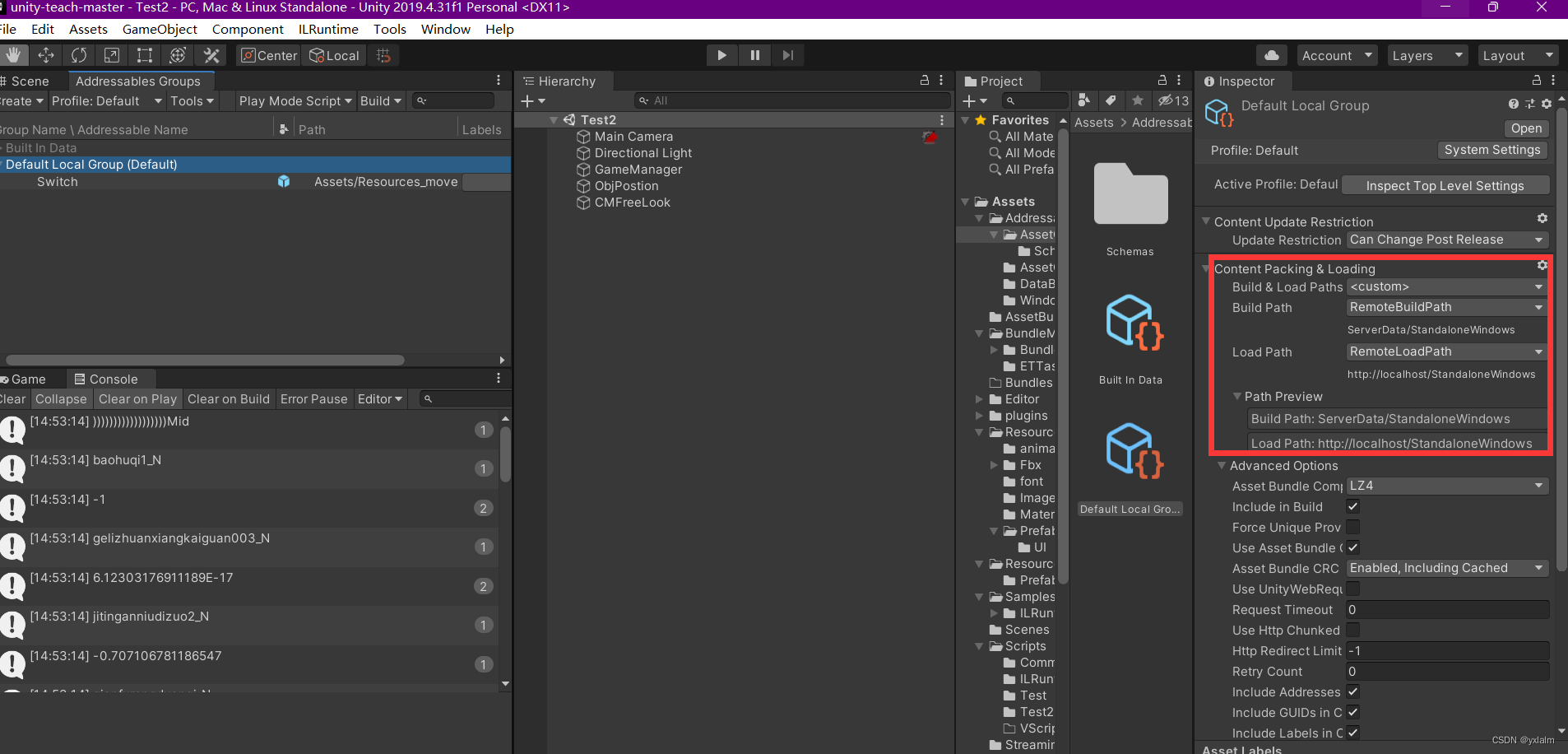
Unity 3D模型展示框架篇之资源打包、加载、热更(Addressable Asset System | 简称AA)
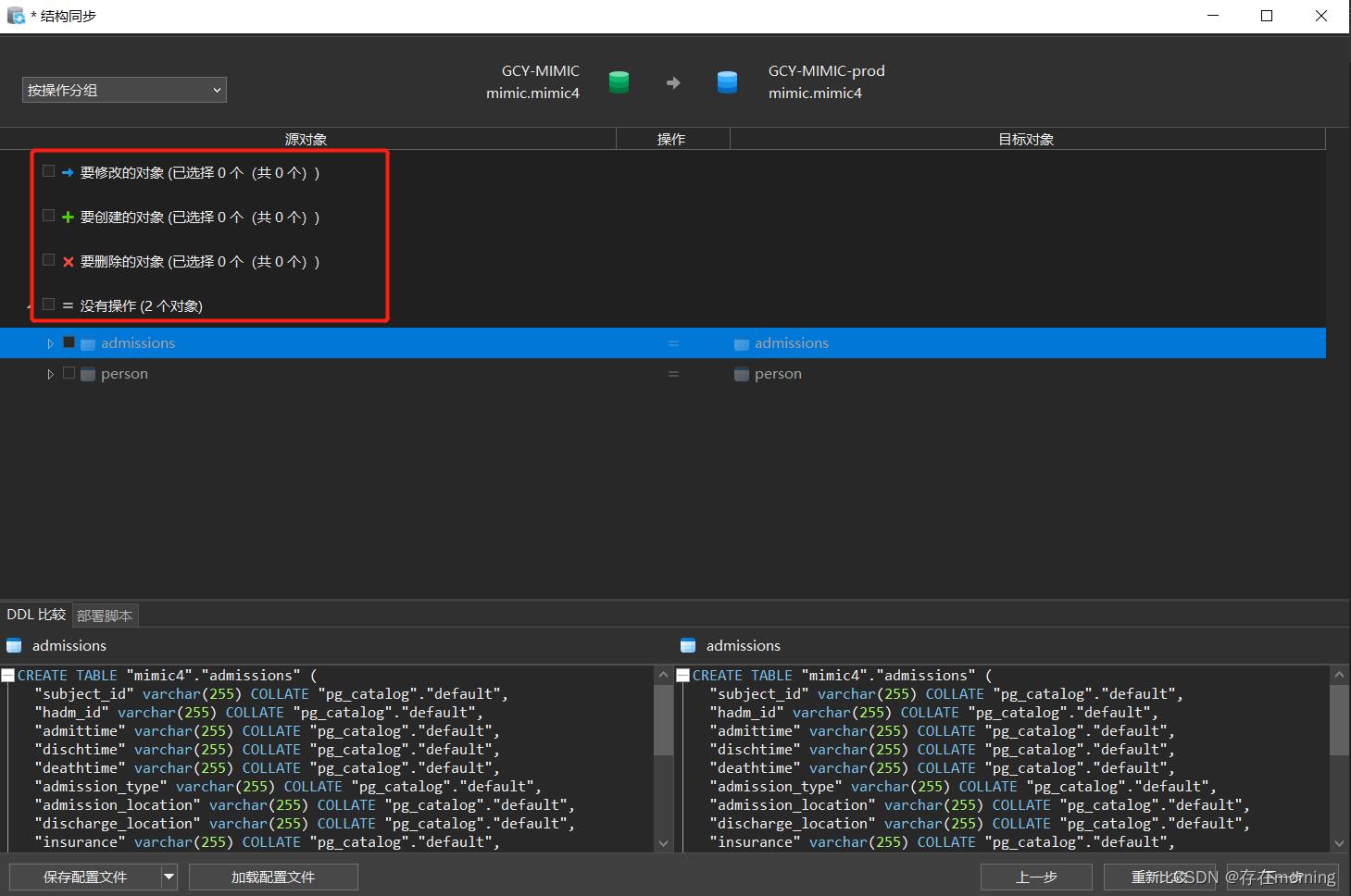
【解决方案 三十一】Navicat数据库结构同步
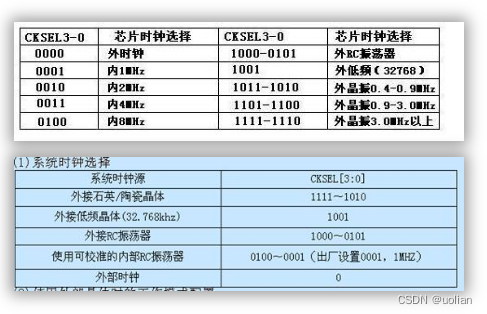
AVR学习笔记之熔丝位

国家安全机关对涉嫌危害国家安全犯罪嫌疑人杨智渊实施刑事拘传审查
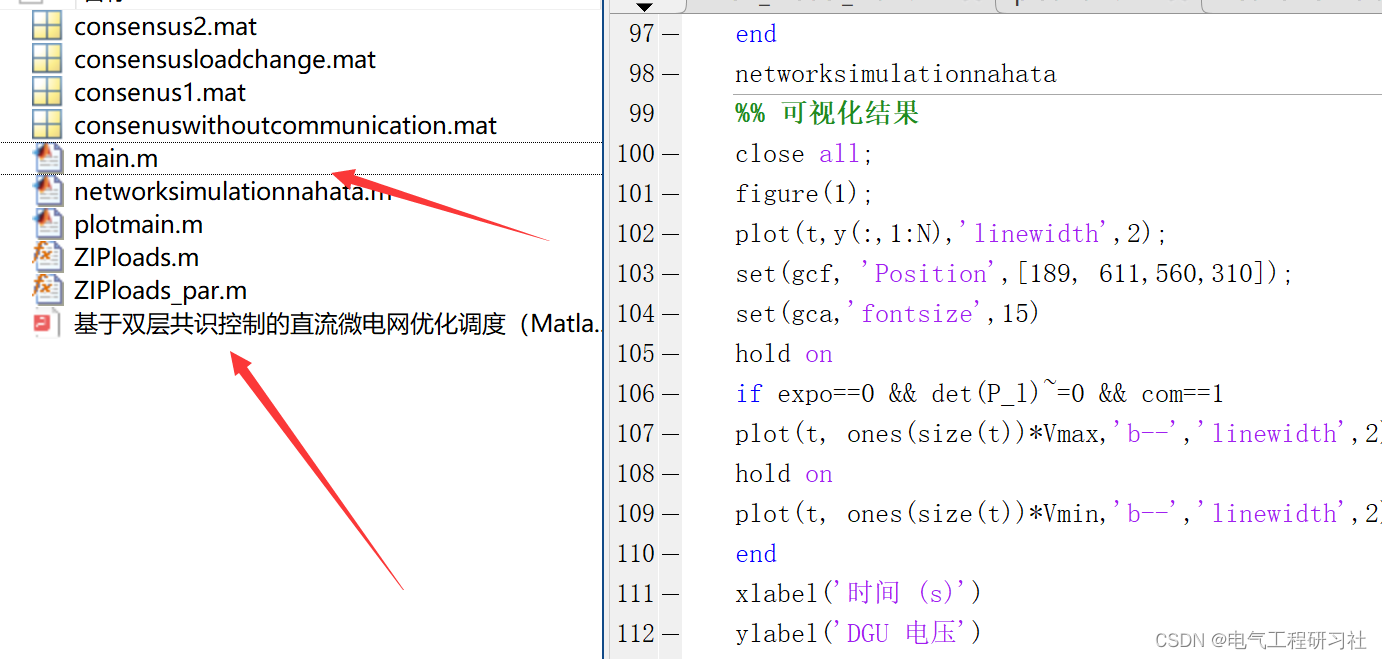
基于双层共识控制的直流微电网优化调度(Matlab代码实现)
随机推荐
AVR学习笔记之熔丝位
面试官:说一下NIO和BIO的区别
leetcode 48. Rotate Image (Medium)
中大型商业银行堡垒机升级改造就用行云管家!必看!
Fuse bit of AVR study notes
RT-Thread stm32 基础记录
【无标题】
Script to get local IP address
Map常见的遍历方式-keySet 和 entrySet
第四讲 SVN
化算力为战力:宁夏中卫的数字化转型启示录
router---mode
LeetCode_3_无重复字符的最长子串
荧光磷脂PEG衍生物之一磷脂-聚乙二醇-荧光素,Fluorescein-PEG-DSPE
ssm学习心得(完结篇
Utility function---string processing
router---编程式导航
FreeConfig.h文件
TS---类型设置
卷积神经网络 基础