当前位置:网站首页>[code practice] [stereo matching series] Classic ad census: (5) scan line optimization
[code practice] [stereo matching series] Classic ad census: (5) scan line optimization
2022-07-05 08:53:00 【Li Yingsong~】
Happy National Day holiday, students ! Natural and unrestrained 7 God ( Bring baby 7 God ), It's hard to sit down and update your blog .
Download the complete source code , Click to enter : https://github.com/ethan-li-coding/AD-Census
Welcome to Github Discuss in the project !
Next chapter Cross domain cost aggregation , The content of this article is AD-Census Scan line optimization steps , actually , The idea of this step and SGM The code aggregation of is basically the same , But in P1/P2 Some modifications have been made to the parameter settings . exactly ,SGM Of P1、P2 Setting the policy is too simple , The advantage is high robustness , We can get a good parallax result for most data , But the obvious drawback is that it is difficult to find a particularly good combination of parameters , Make the data of specific application scenarios reach a relatively perfect state ,P1/P2 The setting of is critical to the overall parallax effect, especially the parallax at the edge , therefore AD-Census The improvement direction of is of practical significance .
We might as well take a look directly first AD-Census The result of scan line optimization :
 |  |  |  |
obviously , The parallax map after scan line optimization is more complete than that after cost aggregation , Less error value . Of course, that doesn 't mean AD-Census The parameter improvement of is effective , It only shows that the scan line optimization steps are effective .
Let's take a look at the coding introduction !
List of articles
Algorithm
alike , Please see the blog for the principle of Algorithm :
classic AD-Census: (3) Scan line optimization (Scanline Optimization)
Here I won't talk about the principle of optimization , and SGM(SemiGlobalMatching) The cost aggregation strategy is exactly the same , Just read the previous blogs of bloggers ,AD-Census use 4 Scan line optimization of direction , That is, up and down, around 4 A direction .
AD-Census The changes made are P 1 P_1 P1 and P 2 P_2 P2 Setting method of value , stay SGM in , P 1 P_1 P1、 P 2 ′ P_2' P2′ Is a preset fixed value , Actually used P 2 P_2 P2 It is adjusted in real time according to the brightness difference between two adjacent pixels in the left view , The adjustment formula is P 2 = P 2 ′ / ( I p − I q ) P_2=P_2'/(I_p-I_q) P2=P2′/(Ip−Iq).
And in the Ad-Census in , P 1 P_1 P1、 P 2 P_2 P2 Not just the color difference from the adjacent pixels in the left view D 1 = D c ( p , p − r ) D_1=D_c(p,p-r) D1=Dc(p,p−r) of , The color of adjacent pixels corresponds to the color difference of adjacent pixels with the same name D 2 = D c ( p d , p d − r ) D_2=D_c(pd,pd-r) D2=Dc(pd,pd−r) of .
( notes 1:AD-Census Algorithm default input color map , So it's a color difference , If it is an input grayscale image , Is the brightness difference , The definition of color difference is D c ( p l , p ) = m a x i = R , G , B ∣ I i ( p l ) − I i ( p ) ∣ D_c(p_l,p)=max_{i=R,G,B}|I_i(p_l)-I_i(p)| Dc(pl,p)=maxi=R,G,B∣Ii(pl)−Ii(p)∣, That is, the maximum value of the difference between the three color components )
( notes 2: p d pd pd It's actually pixels p p p Through parallax d d d Found a point with the same name on the right view of q = p − d q=p-d q=p−d)
( notes 3: p − r p-r p−r Represents the last pixel in the aggregation direction , For example, aggregate from left to right , be p − r p-r p−r Namely p − 1 p-1 p−1; From right to left , be p − r p-r p−r Namely p + 1 p+1 p+1)
The specific setting rules are as follows :
- P 1 = Π 1 , P 2 = Π 2 , i f D 1 < τ S O , D 2 < τ S O P_1=Π_1,P_2=Π_2, if D_1<τ_{SO},D_2<τ_{SO} P1=Π1,P2=Π2,ifD1<τSO,D2<τSO
- P 1 = Π 1 / 4 , P 2 = Π 2 / 4 , i f D 1 < τ S O , D 2 > τ S O P_1=Π_1/4,P_2=Π_2/4, if D_1<τ_{SO},D_2>τ_{SO} P1=Π1/4,P2=Π2/4,ifD1<τSO,D2>τSO
- P 1 = Π 1 / 4 , P 2 = Π 2 / 4 , i f D 1 > τ S O , D 2 < τ S O P_1=Π_1/4,P_2=Π_2/4, if D_1>τ_{SO},D_2<τ_{SO} P1=Π1/4,P2=Π2/4,ifD1>τSO,D2<τSO
- P 1 = Π 1 / 10 , P 2 = Π 2 / 10 , i f D 1 > τ S O , D 2 > τ S O P_1=Π_1/10,P_2=Π_2/10, if D_1>τ_{SO},D_2>τ_{SO} P1=Π1/10,P2=Π2/10,ifD1>τSO,D2>τSO
Π 1 , Π 2 Π_1,Π_2 Π1,Π2 Is the set fixed threshold , τ S O τ_{SO} τSO Is the set color difference threshold .
Code implementation
Class design
Member functions
Again , We use a scanline optimizer class ScanlineOptimizer To achieve this function . Put it in the file scanline_optimizer.h/scanline_optimizer.cpp in .
/** * \brief Scan line optimizer */
class ScanlineOptimizer {
public:
ScanlineOptimizer();
~ScanlineOptimizer();
}
In the design of public member functions , The first type of interface is essential Set up the data SetData as well as Set parameters SetParam , Complete the input of the algorithm . The second is to optimize the function interface Optimize .
And the specific optimization sub steps , We put it in the private member function list , Including horizontal aggregation CostAggregateLeftRight And vertical convergence CostAggregateUpDown.
meanwhile , Algorithm needs a small function color distance calculation function ColorDist, Also in private functions .
The declaration code of all member functions is as follows :
public:
ScanlineOptimizer();
~ScanlineOptimizer();
/** * \brief Set up the data * \param img_left // Left image data , Three channels * \param img_right // Right image data , Three channels * \param cost_init // Initial cost array * \param cost_aggr // Aggregate cost array */
void SetData(const uint8* img_left, const uint8* img_right, float32* cost_init, float32* cost_aggr);
/** * \brief * \param width // The image is wide * \param height // Image height * \param min_disparity // Minimum parallax * \param max_disparity // Maximum parallax * \param p1 // p1 * \param p2 // p2 * \param tso // tso */
void SetParam(const sint32& width,const sint32& height, const sint32& min_disparity, const sint32& max_disparity, const float32& p1, const float32& p2, const sint32& tso);
/** * \brief Optimize */
void Optimize();
private:
/** * \brief Left and right path aggregation → ← * \param cost_so_src Input ,SO Previous cost data * \param cost_so_dst Output ,SO Offspring price data * \param is_forward Input , Is it positive ( The positive direction is from left to right , The reverse direction is from right to left ) */
void CostAggregateLeftRight(const float32* cost_so_src, float32* cost_so_dst, bool is_forward = true);
/** * \brief Up and down path aggregation ↓ ↑ * \param cost_so_src Input ,SO Previous cost data * \param cost_so_dst Output ,SO Offspring price data * \param is_forward Input , Is it positive ( The positive direction is from top to bottom , The opposite direction is from bottom to top ) */
void CostAggregateUpDown(const float32* cost_so_src, float32* cost_so_dst, bool is_forward = true);
/** \brief Calculate the color distance */
inline sint32 ColorDist(const ADColor& c1, const ADColor& c2) {
return std::max(abs(c1.r - c2.r), std::max(abs(c1.g - c2.g), abs(c1.b - c2.b)));
}
Write clear comments for each function , Easy to understand quickly . In addition, the function to calculate the color distance is an inline function , Declaration also defines and implements it .
Member variables
All member variables are designed to be private , Only used inside the algorithm , They are image sizes 、 Image data 、 Cost data ( initial / polymerization )、 Algorithm parameters, etc .
private:
/** \brief Image size */
sint32 width_;
sint32 height_;
/** \brief Image data */
const uint8* img_left_;
const uint8* img_right_;
/** \brief Initial cost array */
float32* cost_init_;
/** \brief Aggregate cost array */
float32* cost_aggr_;
/** \brief Minimum parallax value */
sint32 min_disparity_;
/** \brief Maximum parallax value */
sint32 max_disparity_;
/** \brief Initial p1 value */
float32 so_p1_;
/** \brief Initial p2 value */
float32 so_p2_;
/** \brief tso threshold */
sint32 so_tso_;
Class implementation
because SetData and SetParam Relatively simple , There is also very little code , So I won't introduce it , You can understand it by reading the code . Here are two sub steps of scan line optimization CostAggregateLeftRight and CostAggregateUpDown.
actually , I'm going straight to SGM The cost of aggregation code moved over , modify P 1 P_1 P1 and P 2 P_2 P2 Just calculate the value . as follows :
void ScanlineOptimizer::CostAggregateLeftRight(const float32* cost_so_src, float32* cost_so_dst, bool is_forward)
{
const auto width = width_;
const auto height = height_;
const auto min_disparity = min_disparity_;
const auto max_disparity = max_disparity_;
const auto p1 = so_p1_;
const auto p2 = so_p2_;
const auto tso = so_tso_;
assert(width > 0 && height > 0 && max_disparity > min_disparity);
// Parallax range
const sint32 disp_range = max_disparity - min_disparity;
// positive ( Left -> Right ) :is_forward = true ; direction = 1
// reverse ( Right -> Left ) :is_forward = false; direction = -1;
const sint32 direction = is_forward ? 1 : -1;
// polymerization
for (sint32 y = 0u; y < height; y++) {
// The path header is the first of each line ( tail ,dir=-1) Column pixel
auto cost_init_row = (is_forward) ? (cost_so_src + y * width * disp_range) : (cost_so_src + y * width * disp_range + (width - 1) * disp_range);
auto cost_aggr_row = (is_forward) ? (cost_so_dst + y * width * disp_range) : (cost_so_dst + y * width * disp_range + (width - 1) * disp_range);
auto img_row = (is_forward) ? (img_left_ + y * width * 3) : (img_left_ + y * width * 3 + 3 * (width - 1));
const auto img_row_r = img_right_ + y * width * 3;
sint32 x = (is_forward) ? 0 : width - 1;
// The current color value and the previous color value on the path
ADColor color(img_row[0], img_row[1], img_row[2]);
ADColor color_last = color;
// The cost array of the last pixel on the path , Two more elements to avoid boundary overflow ( One more at the beginning and one more at the end )
std::vector<float32> cost_last_path(disp_range + 2, Large_Float);
// initialization : The aggregate generation value of the first pixel is equal to the initial generation value
memcpy(cost_aggr_row, cost_init_row, disp_range * sizeof(float32));
memcpy(&cost_last_path[1], cost_aggr_row, disp_range * sizeof(float32));
cost_init_row += direction * disp_range;
cost_aggr_row += direction * disp_range;
img_row += direction * 3;
x += direction;
// The minimum generation value of the last pixel on the path
float32 mincost_last_path = Large_Float;
for (auto cost : cost_last_path) {
mincost_last_path = std::min(mincost_last_path, cost);
}
// From... In direction 2 Pixels start to aggregate in order
for (sint32 j = 0; j < width - 1; j++) {
color = ADColor(img_row[0], img_row[1], img_row[2]);
const uint8 d1 = ColorDist(color, color_last);
uint8 d2 = d1;
float32 min_cost = Large_Float;
for (sint32 d = 0; d < disp_range; d++) {
const sint32 xr = x - d;
if (xr > 0 && xr < width - 1) {
const ADColor color_r = ADColor(img_row_r[3 * xr], img_row_r[3 * xr + 1], img_row_r[3 * xr + 2]);
const ADColor color_last_r = ADColor(img_row_r[3 * (xr - direction)],
img_row_r[3 * (xr - direction) + 1],
img_row_r[3 * (xr - direction) + 2]);
d2 = ColorDist(color_r, color_last_r);
}
// Calculation P1 and P2
float32 P1(0.0f), P2(0.0f);
if (d1 < tso && d2 < tso) {
P1 = p1; P2 = p2;
}
else if (d1 < tso && d2 >= tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 < tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 >= tso) {
P1 = p1 / 10; P2 = p2 / 10;
}
// Lr(p,d) = C(p,d) + min( Lr(p-r,d), Lr(p-r,d-1) + P1, Lr(p-r,d+1) + P1, min(Lr(p-r))+P2 ) - min(Lr(p-r))
const float32 cost = cost_init_row[d];
const float32 l1 = cost_last_path[d + 1];
const float32 l2 = cost_last_path[d] + P1;
const float32 l3 = cost_last_path[d + 2] + P1;
const float32 l4 = mincost_last_path + P2;
float32 cost_s = cost + static_cast<float32>(std::min(std::min(l1, l2), std::min(l3, l4)));
cost_s /= 2;
cost_aggr_row[d] = cost_s;
min_cost = std::min(min_cost, cost_s);
}
// Reset the minimum generation value and cost array of the previous pixel
mincost_last_path = min_cost;
memcpy(&cost_last_path[1], cost_aggr_row, disp_range * sizeof(float32));
// Next pixel
cost_init_row += direction * disp_range;
cost_aggr_row += direction * disp_range;
img_row += direction * 3;
x += direction;
// Reassign pixel values
color_last = color;
}
}
}
If you don't know the aggregation code , You can see my previous blog :
In this article, we will focus on P1 and P2 Calculation method of :
Let's start with each pixel , Calculate the color distance between it and the previous pixel on the left view ( Color difference ) d 1 d_1 d1:
const uint8 d1 = ColorDist(color, color_last);
Then when traversing each parallax of pixels , Calculate the color distance between the corresponding pixel of the right view and its previous pixel d 2 d_2 d2.
const sint32 xr = x - d;
if (xr > 0 && xr < width - 1) {
const ADColor color_r = ADColor(img_row_r[3 * xr], img_row_r[3 * xr + 1], img_row_r[3 * xr + 2]);
const ADColor color_last_r = ADColor(img_row_r[3 * (xr - direction)],
img_row_r[3 * (xr - direction) + 1],
img_row_r[3 * (xr - direction) + 2]);
d2 = ColorDist(color_r, color_last_r);
}
Next, according to d 1 d_1 d1 and d 2 d_2 d2 Comparison with threshold , It is judged as one of four situations , Calculation P1 and P2 Value .
// Calculation P1 and P2
float32 P1(0.0f), P2(0.0f);
if (d1 < tso && d2 < tso) {
P1 = p1; P2 = p2;
}
else if (d1 < tso && d2 >= tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 < tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 >= tso) {
P1 = p1 / 10; P2 = p2 / 10;
}
among , Lowercase p1、p2, as well as tso Are all input algorithm parameters .
const auto p1 = so_p1_;
const auto p2 = so_p2_;
const auto tso = so_tso_;
I won't post the code in the vertical direction , Except in different directions , There is no other difference with the horizontal direction , Draw a gourd and a gourd .
Public optimization interface Optimize Inside , Just call the optimization functions in four directions in turn .
void ScanlineOptimizer::Optimize()
{
if (width_ <= 0 || height_ <= 0 ||
img_left_ == nullptr || img_right_ == nullptr ||
cost_init_ == nullptr || cost_aggr_ == nullptr) {
return;
}
// 4 Directional scan line optimization
// The first input of the module is the data after the cost aggregation in the previous step , That is to say cost_aggr_
// We optimize the four directions in order , And make use of cost_init_ And cost_aggr_ Save temporary data between times , In this way, there is no need to open up additional memory to store intermediate results
// The final output of the module is also cost_aggr_
// left to right
CostAggregateLeftRight(cost_aggr_, cost_init_, true);
// right to left
CostAggregateLeftRight(cost_init_, cost_aggr_, false);
// up to down
CostAggregateUpDown(cost_aggr_, cost_init_, true);
// down to up
CostAggregateUpDown(cost_init_, cost_aggr_, false);
}
Here's a little trick , That is, alternate use cost_aggr and cost_init, There is no need to open up an additional cost array in four directions , The whole optimization operation is completed with only two cost data .
experiment
We did three groups of experiments , One group is to optimize the scanning line only in the left and right horizontal directions , One group is to optimize the scanning line in the vertical direction , The remaining group is to optimize in four directions . Let's see the effect .
|  |  | |
it seems , Only do horizontal or vertical optimization , The disparity map has been significantly improved , However, there will be directional fringe effect in unidirectional optimization , and 4 The optimization result of direction can eliminate this phenomenon , Reach a better state .
Last , Let's post the experimental picture at the beginning of the article :
| | | |
Okay , This is the end of this article , The next article will bring you post-processing part . Thank you for watching. !
download AD-Census Complete source code , Click to enter : https://github.com/ethan-li-coding/AD-Census
Welcome to Github Discuss in the project , If you think the blogger's code quality is good , There is a star in the upper right corner ! thank !
About bloggers :
Ethan Li Li Yingsong ( You know : Li Yingsong )
Wuhan University Doctor of photogrammetry and remote sensing
Main direction Stereo matching 、 Three dimensional reconstruction
2019 Won the first prize of scientific and technological progress in surveying and mapping in ( Provincial and ministerial level )
Love 3D , Love sharing , Love open source
GitHub: https://github.com/ethan-li-coding ( welcome follow and star)
Personal wechat :
Welcome to exchange !
Pay attention to bloggers and don't get lost , thank !
Blog home page :https://ethanli.blog.csdn.net

边栏推荐
- Use arm neon operation to improve memory copy speed
- 交通运输部、教育部:广泛开展水上交通安全宣传和防溺水安全提醒
- Basic number theory -- Euler function
- Wheel 1:qcustomplot initialization template
- asp.net(c#)的货币格式化
- Search data in geo database
- Numpy pit: after the addition of dimension (n, 1) and dimension (n,) array, the dimension becomes (n, n)
- TypeScript手把手教程,简单易懂
- Confusing basic concepts member variables local variables global variables
- [daily training -- Tencent selected 50] 557 Reverse word III in string
猜你喜欢
深度学习模型与湿实验的结合,有望用于代谢通量分析
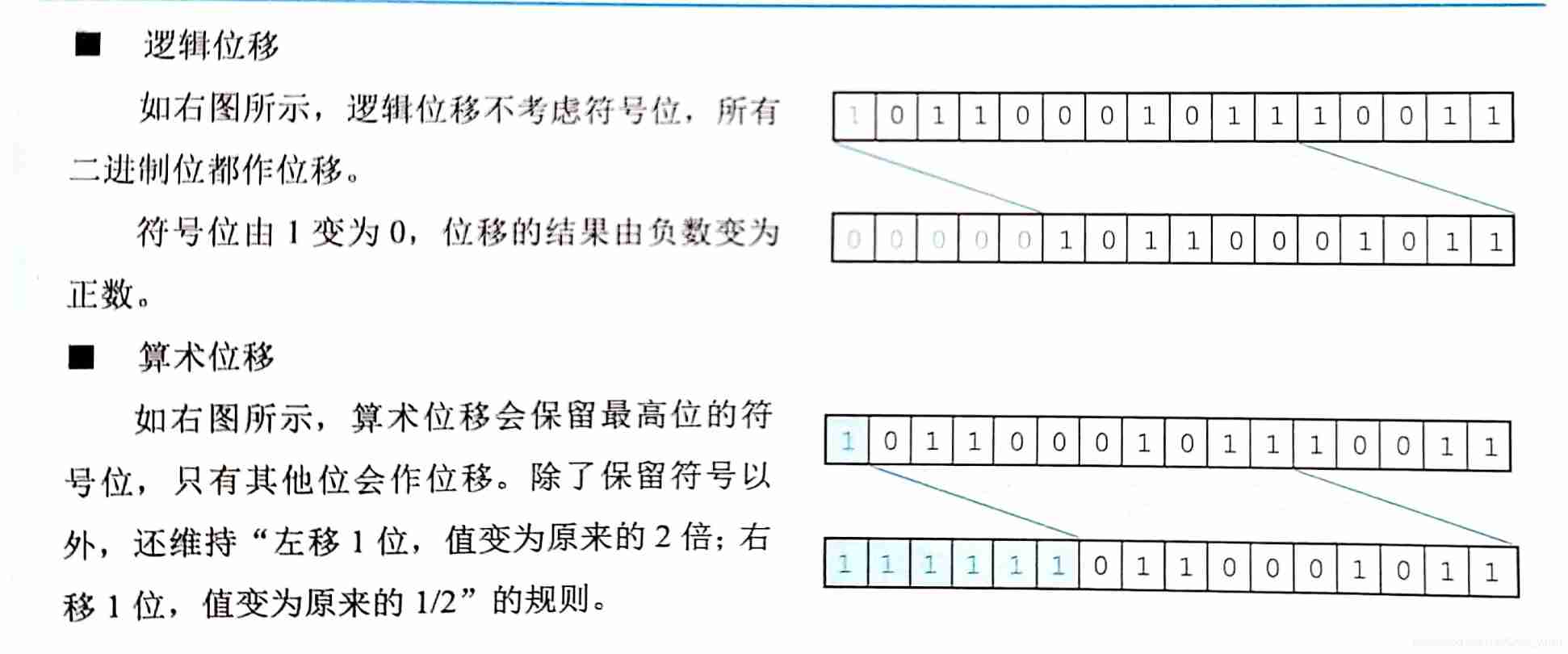
Shift operation of complement
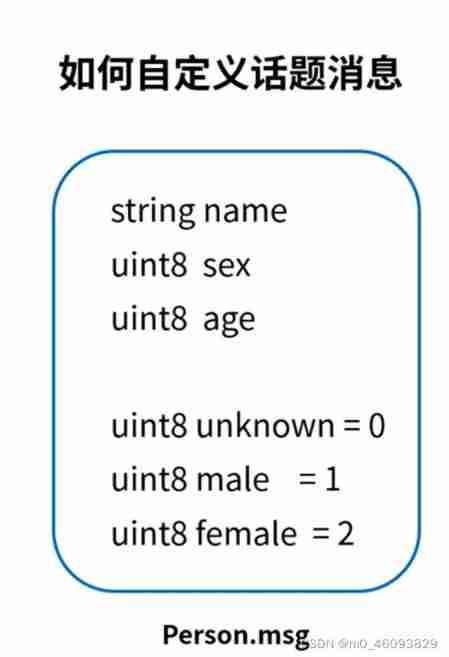
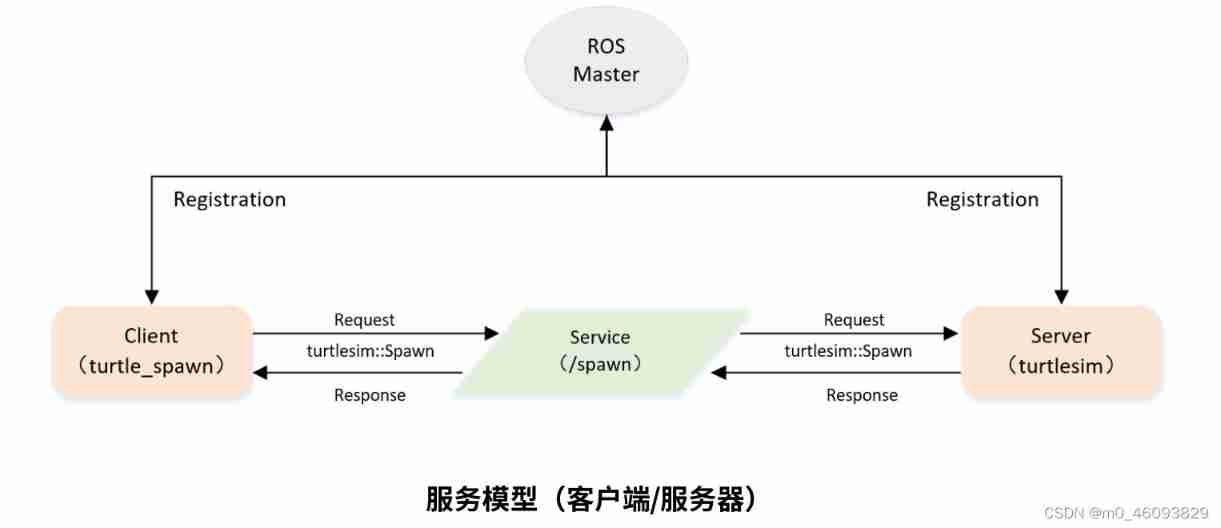
ROS learning 4 custom message

My experience from technology to product manager

Guess riddles (11)
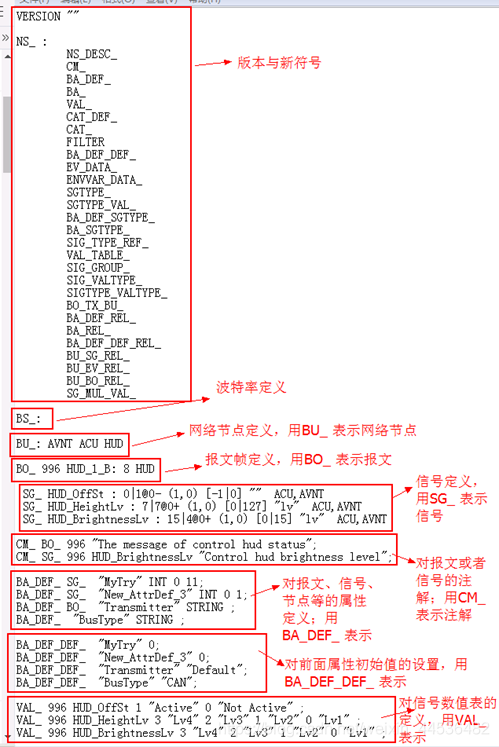
AUTOSAR从入门到精通100讲(103)-dbc文件的格式以及创建详解
![[daiy4] copy of JZ35 complex linked list](/img/bc/ce90bb3cb6f52605255f1d6d6894b0.png)
[daiy4] copy of JZ35 complex linked list
Business modeling of software model | overview
图解八道经典指针笔试题
Programming implementation of ROS learning 5-client node
随机推荐
Array,Date,String 对象方法
Guess riddles (142)
12、动态链接库,dll
Confusing basic concepts member variables local variables global variables
Halcon clolor_ pieces. Hedv: classifier_ Color recognition
轮子1:QCustomPlot初始化模板
Wheel 1:qcustomplot initialization template
【日常训练--腾讯精选50】557. 反转字符串中的单词 III
Halcon shape_ trans
[formation quotidienne - Tencent Selection 50] 557. Inverser le mot III dans la chaîne
Numpy 小坑:维度 (n, 1) 和 维度 (n, ) 数组相加运算后维度变为 (n, n)
asp. Net (c)
皮尔森相关系数
IT冷知识(更新ing~)
多元线性回归(梯度下降法)
Redis implements a high-performance full-text search engine -- redisearch
520 diamond Championship 7-4 7-7 solution
Program error record 1:valueerror: invalid literal for int() with base 10: '2.3‘
Adaboost使用
Basic number theory - factors