当前位置:网站首页>最近公共祖先离线做法(tarjan)
最近公共祖先离线做法(tarjan)
2022-07-01 19:36:00 【Zqchang】
在线离线
在线和离线一般是针对有询问的题目
在线做法:就是每读入一个询问,就可以立即算一个答案,然后输出
离线做法:我们必须先把所有询问统一读进来,然后统一计算完之后,再把所有询问统一输出
tarjan O(n + m)
n是节点数量,m是询问数量
本质是对向上标记法的优化
向上标记法
具体可看上一个在线做法
在深度优先遍历过程中把所有点分为三大类
1.已经遍历过,且回溯过的点,被搜过,而且子树被搜完
2.正在搜索的分支
3.还未搜索到的点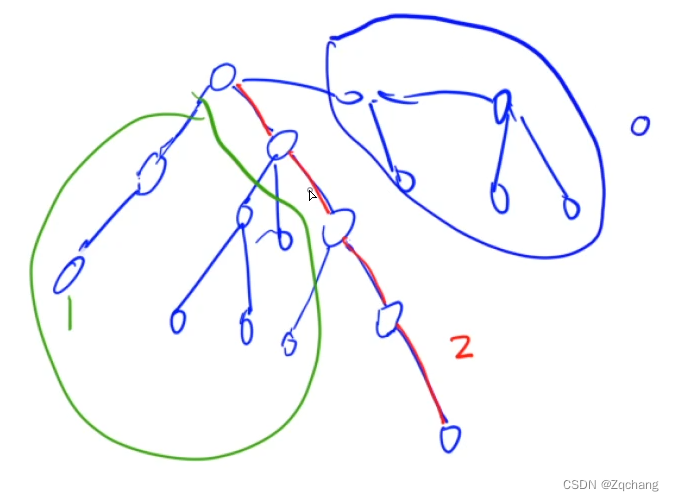
假设是从左往右搜索,就形成了这样的一棵树绿色是第一种,红色是第二种,也就是一个路径,其他的是第三种

对于正在搜索的点,我们找一下与之相关的询问,由上图可以发现,当前询问的点x和绿色部分的公共祖先都是路径总的点,因为可以将路径中点的子树合并到该点中去,最后求公共祖先的时候,就是看一下那个点被合并到哪个点去了,可以用并查集来实现,这就是找祖宗节点
这样,每个点只会被遍历一次,也只会被合并一次,对于每个查询也只会查询一次
主要思想
我们在遍历当前这个分支的时候,对于所有和这个点相关的节点的公共祖先,我们可以发现,如果这个点已经被遍历过了的话,所在整个子树的公共祖先都是路径中的那个点,也就是该子树的根节点,也就是每次遍历完一个点之后,就可以把当前这个点直接合并到根节点当中去,当我们查询的时候,就可以直接在并查集里面查当前元素的代表元素是谁,这个代表元素就是它的公共祖先
这个要注意什么时候合并,就是要在回溯完之后,再把它合并到父节点中
例题
距离
题意就是要求两个点之间的距离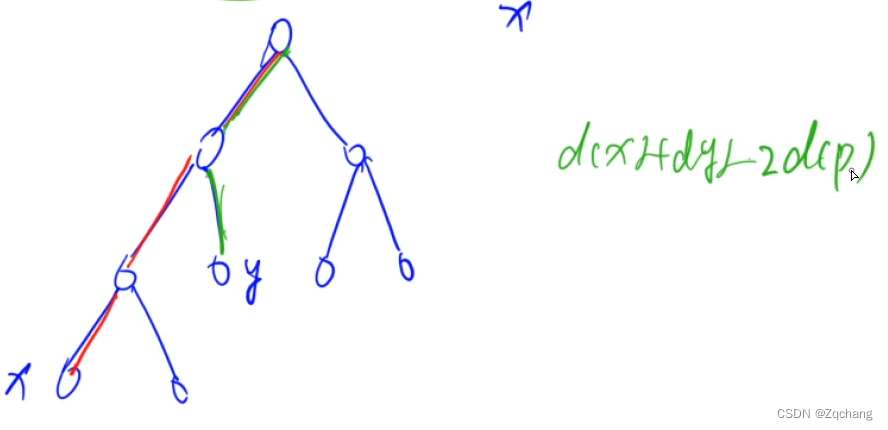
方法如图,都算出来到根节点的距离,再减去两倍的公共祖先的距离
#include<bits/stdc++.h>
using namespace std;
#define endl '\n'
#define int long long
#define PII pair<int, int>
const int N = 1e4 + 10;
#define x first
#define y second
vector<PII> v[N];
int n, m, a, b, k;
int dist[N];//存储每个点到根节点距离
int p[N];
int res[N * 2];// 存答案
int st[N];
vector<PII> query[N]; // first存查询的另外一个点,second存查询编号
int find(int x)
{
if (p[x] != x) p[x] = find(p[x]);
return p[x];
}
void dfs(int u, int fa)
{
for(auto i : v[u])
{
if(i.x == fa) continue;
dist[i.x] = dist[u] + i.y;
dfs(i.x, u);
}
}
void tarjan(int u)
{
st[u] = 1;
for(auto i : v[u])
{
if(!st[i.x])
{
tarjan(i.x);
p[i.x] = u;
}
}
for(auto i : query[u])
{
if(st[i.x] == 2)//查看另一个点是不是回溯过了,如果没回溯过就跳
{
int anc = find(i.x);
res[i.y] = dist[u] + dist[i.x] - dist[anc] * 2;
}
}
st[u] = 2;
}
signed main()
{
cin >> n >> m;
for(int i=1; i<=n-1; i++)
{
cin >> a >> b >> k;
v[a].push_back({
b, k});
v[b].push_back({
a, k});
}
for(int i=1; i<=m; i++)
{
cin >> a >> b;
if(a != b)
{
query[a].push_back({
b, i});
query[b].push_back({
a, i});
}
}
for(int i=1; i<=n; i++) p[i] = i;
dfs(1, -1);
tarjan(1);
for(int i=1; i<=m; i++) cout << res[i] << endl;
return 0;
}
边栏推荐
- 如果浏览器被意外关闭,react怎么缓存用户填写的表单?
- STC 32-bit 8051 single chip microcomputer development example tutorial II i/o working mode and its configuration
- Halcon知识:三维重构的一个尝试
- 合成大西瓜小游戏微信小程序源码/微信游戏小程序源码
- Slf4j打印异常的堆栈信息
- 目標檢測——Yolo系列
- Stack overflow 2022 developer survey: where is the industry going?
- How can I know if I want to get the preferential link of stock account opening? Is it safe to open an account online?
- 走进如心小镇,数智化变革连接“未来社区”
- leetcode刷题:栈与队列06(前 K 个高频元素)
猜你喜欢
math_ Use differentiation to calculate approximate value

leetcode刷题:二叉树03(二叉树的后序遍历)

运动捕捉系统原理

Entering Ruxin Town, digital intelligence transformation connects "future community"
【Opencv450】HOG+SVM 与Hog+cascade进行行人检测

小鸟逃票登机,如何反思,应如何解决,飞机为何怕小鸟?

Error in installing sharp

Optimization of the problem that the request flow fails to terminate during page switching of easycvr cluster video Plaza
Richview trvdocparameters page parameter settings

天气预报小程序源码 天气类微信小程序源码
随机推荐
Gaussdb (for MySQL):partial result cache, which accelerates the operator by caching intermediate results
从20s优化到500ms,我用了这三招
EMC-电路保护器件-防浪涌及冲击电流用
RichView 文档中的 ITEM
leetcode刷题:栈与队列05(逆波兰表达式求值)
合成大西瓜小游戏微信小程序源码/微信游戏小程序源码
GCC编译
深度学习 常见的损失函数
如何用OpenMesh创建一个四棱锥
leetcode刷题:二叉树02(二叉树的中序遍历)
PHP gets the external chain address of wechat applet and applet store
关于一个神奇函数的用法
Develop those things: easycvr cluster device management page function display optimization
Niuke programming question -- must brush the string of 101 (brush the question efficiently, draw inferences from one instance)
There are four ways to write switch, you know
EDA工具对芯片产业的重要性知识科普
三菱PLC FX3U脉冲轴点动功能块(MC_Jog)
Practical project notes (I) -- creation of virtual machine
Swiftui 4 new features complete toggle and mixed toggle multiple binding components
牛客编程题--必刷101之字符串(高效刷题,举一反三)