当前位置:网站首页>PCL point cloud to depth image
PCL point cloud to depth image
2022-07-02 10:56:00 【AICVer】
Point cloud to depth image
#include <pcl/range_image/range_image.h> // Header file of depth image
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ> pointCloud; // Define the object of the point cloud
// Generate point cloud data circularly
for (float y = -0.5f; y <= 0.5f; y += 0.01f) {
for (float z = -0.5f; z <= 0.5f; z += 0.01f) {
pcl::PointXYZ point;
point.x = 2.0f - y;
point.y = y;
point.z = z;
pointCloud.points.push_back(point); // Add point data circularly to the point cloud object
}
}
pointCloud.width = (uint32_t)pointCloud.points.size();
pointCloud.height = 1; // Set the header information of the point cloud object
// Realize a rectangular point cloud
// We now want to create a range image from the above point cloud, with a 1deg angular resolution
//angular_resolution Is the angular resolution of the simulated depth sensor , That is, the angle corresponding to a pixel in the depth image
float angularResolution = (float)(1.0f * (M_PI / 180.0f)); // 1.0 degree in radians
//max_angle_width Is the maximum horizontal sampling angle of the analog depth sensor ,
float maxAngleWidth = (float)(360.0f * (M_PI / 180.0f)); // 360.0 degree in radians
//max_angle_height Is the maximum sampling angle in the vertical direction of the analog sensor All turn into radians
float maxAngleHeight = (float)(180.0f * (M_PI / 180.0f)); // 180.0 degree in radians
// The acquisition position of the sensor
Eigen::Affine3f sensorPose = (Eigen::Affine3f)Eigen::Translation3f(0.0f, 0.0f, 0.0f);
// The depth image follows the coordinate system
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
float noiseLevel = 0.00; //noise_level When getting depth image depth , The influence level of the nearest neighbor on the distance value of the query point
float minRange = 0.0f; //min_range Set the minimum acquisition distance , The position less than the minimum acquisition distance is the blind area of the sensor
int borderSize = 1; //border_size Get the width of the edge of the depth image
pcl::RangeImage rangeImage;
rangeImage.createFromPointCloud(pointCloud, angularResolution, maxAngleWidth, maxAngleHeight,
sensorPose, coordinate_frame, noiseLevel, minRange, borderSize);
std::cout << rangeImage << "\n";
}
Extract the boundary from the depth image
/* \author Bastian Steder */
#include <iostream>
#include <boost/thread/thread.hpp>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/range_image_border_extractor.h>
#include <pcl/console/parse.h>
typedef pcl::PointXYZ PointType;
// --------------------
// ----- Parameters -----
// --------------------
float angular_resolution = 0.5f;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool setUnseenToMaxRange = false;
// --------------
// ----- help -----
// --------------
void
printUsage (const char* progName)
{
std::cout << "\n\nUsage: "<<progName<<" [options] <scene.pcd>\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r <float> angular resolution in degrees (default "<<angular_resolution<<")\n"
<< "-c <int> coordinate frame (default "<< (int)coordinate_frame<<")\n"
<< "-m Treat all unseen points to max range\n"
<< "-h this help\n"
<< "\n\n";
}
// --------------
// ----- The main function -----
// --------------
int
main (int argc, char** argv)
{
// --------------------------------------
// ----- Parsing command line arguments -----
// --------------------------------------
if (pcl::console::find_argument (argc, argv, "-h") >= 0)
{
printUsage (argv[0]);
return 0;
}
if (pcl::console::find_argument (argc, argv, "-m") >= 0)
{
setUnseenToMaxRange = true;
cout << "Setting unseen values in range image to maximum range readings.\n";
}
int tmp_coordinate_frame;
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n";
}
if (pcl::console::parse (argc, argv, "-r", angular_resolution) >= 0)
cout << "Setting angular resolution to "<<angular_resolution<<"deg.\n";
angular_resolution = pcl::deg2rad (angular_resolution);
// ------------------------------------------------------------------
// ----- Read pcd file , If not given pcd File creates a sample point cloud -----
// ------------------------------------------------------------------
pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty ())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -1)
{
cout << "Was not able to open file \""<<filename<<"\".\n";
printUsage (argv[0]);
return 0;
}
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0],point_cloud.sensor_origin_[1],point_cloud.sensor_origin_[2])) *Eigen::Affine3f (point_cloud.sensor_orientation_);
std::string far_ranges_filename = pcl::getFilenameWithoutExtension (filename)+"_far_ranges.pcd";
if (pcl::io::loadPCDFile(far_ranges_filename.c_str(), far_ranges) == -1)
std::cout << "Far ranges file \""<<far_ranges_filename<<"\" does not exists.\n";
}
else
{
cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f)
{
for (float y=-0.5f; y<=0.5f; y+=0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.points.push_back (point);
}
}
point_cloud.width = (int) point_cloud.points.size (); point_cloud.height = 1;
}
// -----------------------------------------------
// ----- Create a depth image from a point cloud -----
// -----------------------------------------------
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
boost::shared_ptr<pcl::RangeImage> range_image_ptr (new pcl::RangeImage);
pcl::RangeImage& range_image = *range_image_ptr;
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f), scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges (far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange ();
// --------------------------------------------
// ----- Open the 3D browser and add a point cloud -----
// --------------------------------------------
pcl::visualization::PCLVisualizer viewer ("3D Viewer");
viewer.setBackgroundColor (1, 1, 1);
viewer.addCoordinateSystem (1.0f);
pcl::visualization::PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 0, 0, 0);
viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
//PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 150, 150, 150);
//viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
//viewer.setPointCloudRenderingProperties (PCL_VISUALIZER_POINT_SIZE, 2, "range image");
// -------------------------
// ----- Extract the boundary -----
// -------------------------
pcl::RangeImageBorderExtractor border_extractor (&range_image);
pcl::PointCloud<pcl::BorderDescription> border_descriptions;
border_extractor.compute (border_descriptions);
// ----------------------------------
// ----- Display point sets in the 3D browser -----
// ----------------------------------
pcl::PointCloud<pcl::PointWithRange>::Ptr border_points_ptr(new pcl::PointCloud<pcl::PointWithRange>), veil_points_ptr(new pcl::PointCloud<pcl::PointWithRange>), shadow_points_ptr(new pcl::PointCloud<pcl::PointWithRange>);
pcl::PointCloud<pcl::PointWithRange>& border_points = *border_points_ptr, & veil_points = * veil_points_ptr, & shadow_points = *shadow_points_ptr;
for (int y=0; y< (int)range_image.height; ++y)
{
for (int x=0; x< (int)range_image.width; ++x)
{
if (border_descriptions.points[y*range_image.width + x].traits[pcl::BORDER_TRAIT__OBSTACLE_BORDER])
border_points.points.push_back (range_image.points[y*range_image.width + x]);
if (border_descriptions.points[y*range_image.width + x].traits[pcl::BORDER_TRAIT__VEIL_POINT])
veil_points.points.push_back (range_image.points[y*range_image.width + x]);
if (border_descriptions.points[y*range_image.width + x].traits[pcl::BORDER_TRAIT__SHADOW_BORDER])
shadow_points.points.push_back (range_image.points[y*range_image.width + x]);
}
}
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> border_points_color_handler (border_points_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointWithRange> (border_points_ptr, border_points_color_handler, "border points");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "border points");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> veil_points_color_handler (veil_points_ptr, 255, 0, 0);
viewer.addPointCloud<pcl::PointWithRange> (veil_points_ptr, veil_points_color_handler, "veil points");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "veil points");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> shadow_points_color_handler (shadow_points_ptr, 0, 255, 255);
viewer.addPointCloud<pcl::PointWithRange> (shadow_points_ptr, shadow_points_color_handler, "shadow points");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "shadow points");
//-------------------------------------
// ----- Show point sets in depth images -----
// ------------------------------------
pcl::visualization::RangeImageVisualizer* range_image_borders_widget = NULL;
range_image_borders_widget =
pcl::visualization::RangeImageVisualizer::getRangeImageBordersWidget (range_image, -std::numeric_limits<float>::infinity (), std::numeric_limits<float>::infinity (), false, border_descriptions, "Range image with borders" );
// -------------------------------------
//--------------------
// ----- Main circulation -----
//--------------------
while (!viewer.wasStopped ())
{
range_image_borders_widget->spinOnce ();
viewer.spinOnce ();
pcl_sleep(0.01);
}
}
Instance analysis
#include <pcl/range_image/range_image.h>
#include <pcl/range_image/range_image_planar.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/features/integral_image_normal.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/console/print.h>
#include <pcl/surface/organized_fast_mesh.h>
#include <pcl/console/time.h>
#include <Eigen/StdVector>
#include <Eigen/Geometry>
#include <iostream>
#include <pcl/surface/impl/organized_fast_mesh.hpp>
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
using namespace pcl::console;
int main(int argc, char** argv) {
// Generate the data
if (argc < 2)
{
print_error("Syntax is: %s input.pcd -w 640 -h 480 -cx 320 -cy 240 -fx 525 -fy 525 -type 0 -size 2\n", argv[0]);
print_info(" where options are:\n");
print_info(" -w X = width of detph iamge ");
return -1;
}
std::string filename = argv[1];
/************************************************************** Define the parameters required for converting from point cloud to depth image , And can accept the parameter settings of the user's command line . ***********************************************************/
int width = 640, height = 480, size = 2, type = 0;
float fx = 525, fy = 525, cx = 320, cy = 240;
parse_argument(argc, argv, "-w", width); // Depth image width
parse_argument(argc, argv, "-h", height);// Depth image height
parse_argument(argc, argv, "-cx", cx);// The position of the optical axis on the depth image x coordinate
parse_argument(argc, argv, "-cy", cy);// The position of the optical axis on the depth image y coordinate
parse_argument(argc, argv, "-fx", fx);// Horizontal focal length
parse_argument(argc, argv, "-fy", fy);// Vertical focal length
parse_argument(argc, argv, "-type", type);// The way of triangulation in surface reconstruction
parse_argument(argc, argv, "-size", size);// Patch size for surface reconstruction
/************************************************************** Load the original point cloud , Create at the same time RangeImagePlanar object , Use the function to change the object createFromPointCloudWithFixedSize() Proceed deep Degree image generation , The parameters here are in addition to those set by the user , It is also necessary to provide the pose of the camera , And the coordinate system that the imaging follows . ***********************************************************/
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::io::loadPCDFile(filename, *cloud);
print_info("Read pcd file successfully\n");
Eigen::Affine3f sensorPose;
sensorPose.setIdentity();
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
float noiseLevel = 0.00;// Simulate noise level during imaging
float minRange = 0.0f;// Consider the points beyond the threshold when imaging
pcl::RangeImagePlanar::Ptr rangeImage(new pcl::RangeImagePlanar);
rangeImage->createFromPointCloudWithFixedSize(*cloud, width, height, cx, cy, fx, fy, sensorPose, coordinate_frame);
std::cout << rangeImage << "\n";
//convert unorignized point cloud to orginized point cloud end
// Visual depth image
pcl::visualization::RangeImageVisualizer range_image_widget("range image");
range_image_widget.showRangeImage(*rangeImage);
range_image_widget.setWindowTitle("range image");
/************************************************************** After the generation of point cloud to depth image , We use this depth image as input , To use the simple triangulation class in the surface reconstruction module to generate the surface model . establish OrganizedFastMesh object , The input parameters of the algorithm are size, adopt setTrianglePixelSize( ) Function interface to change , Its control is very important The fineness of the surface . Another one Parameter is setTriangulationType( ) Method to set the type of triangulation , Is an enumeration variable , Contains triangles shape 、 Quadrilateral, etc . ***********************************************************/
//triangulation based on range image
pcl::OrganizedFastMesh<pcl::PointWithRange>::Ptr tri(new pcl::OrganizedFastMesh<pcl::PointWithRange>);
pcl::search::KdTree<pcl::PointWithRange>::Ptr tree(new pcl::search::KdTree<pcl::PointWithRange>);
tree->setInputCloud(rangeImage);
pcl::PolygonMesh triangles;
tri->setTrianglePixelSize(size);
tri->setInputCloud(rangeImage);
tri->setSearchMethod(tree);
tri->setTriangulationType((pcl::OrganizedFastMesh<pcl::PointWithRange>::TriangulationType)type);
tri->reconstruct(triangles);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("range image"));
viewer->setBackgroundColor(0.5, 0.5, 0.5);
viewer->addPolygonMesh(triangles, "tin");
viewer->addCoordinateSystem();
while (!range_image_widget.wasStopped() && !viewer->wasStopped())
{
range_image_widget.spinOnce();
//pcl_sleep(0.01);
viewer->spinOnce();
}
}
边栏推荐
猜你喜欢

How to get the password of cpolar?

618再次霸榜的秘密何在?耐克最新财报给出答案

AI技术产业热点分析
Hdu1234 door opener and door closer (water question)

《MySQL 8 DBA基础教程》简介
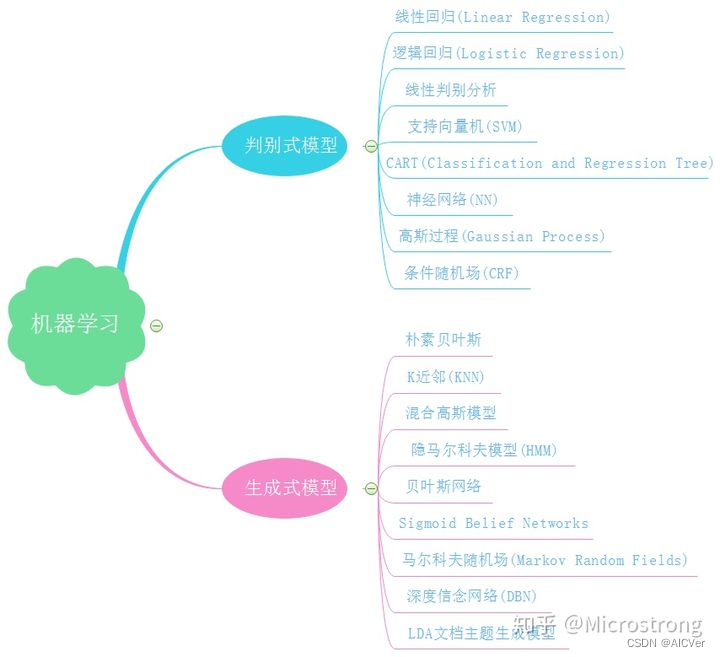
集成学习概览

2022-06-17
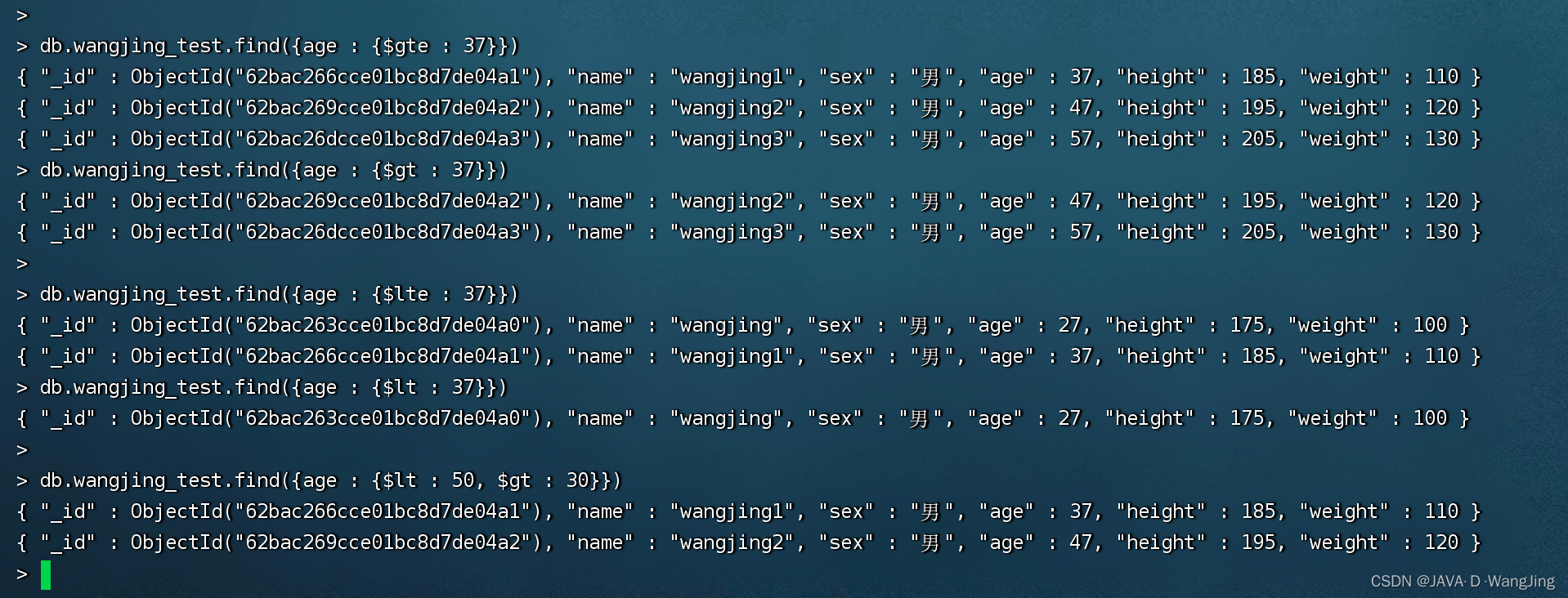
MongoDB 学习整理(条件操作符,$type 操作符,limit()方法,skip() 方法 和 sort() 方法)

"Matching" is true love, a new attitude for young people to make friends

Operator-1 first acquaintance with operator
随机推荐
4. Random variables
JS settimeout() and interview questions
PCL 投影点云
Shapiro Wilk normal analysis by SPSS
How to get the password of cpolar?
PCL 点云转深度图像
The nanny level tutorial of flutter environment configuration makes the doctor green to the end
华为联机对战服务玩家掉线重连案例总结
[SUCTF2018]followme
MySQL environment configuration
HDU1228 A + B(map映射)
UWA报告使用小技巧,你get了吗?(第四弹)
简洁、快速、节约内存的Excel处理工具EasyExcel
Flutter——Canvas自定义曲线图
全网显示 IP 归属地,是怎么实现的?
Kustomize user manual
UVM learning - object attribute of UVM phase
13. Semaphore critical zone protection
(五)APA场景搭建之挡位控制设置
Easyexcel, a concise, fast and memory saving excel processing tool