当前位置:网站首页>Analysis of startup process of gazebo multi computer simulation
Analysis of startup process of gazebo multi computer simulation
2022-06-30 06:19:00 【Smoking hot】
The website links
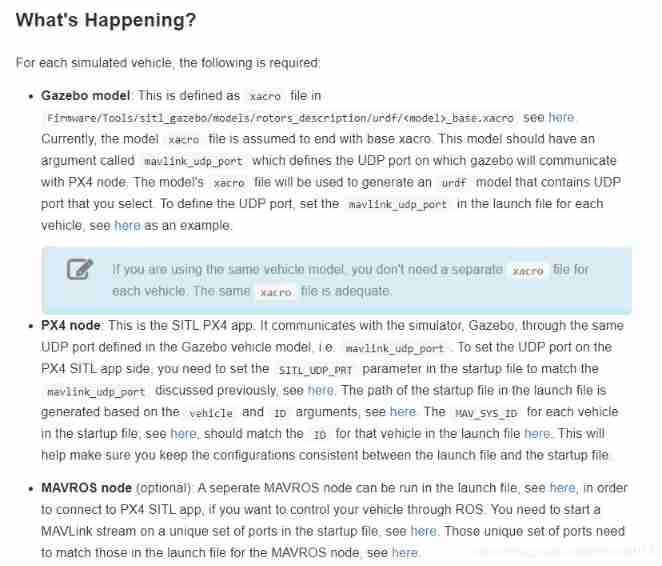
The image below shows px4_sitl Connection mode with each module .
Systematic API/Offboard,GCS Partially through UDP Connect , Can run on the same computer or another computer on the same network .
The emulator is partially via local TCP port 4560 And PX4_sitl Connected to a . Then the simulator uses Simulator MAVLink API And PX4 Exchange information .
1. Gazebo Model file
1)gazebo The model is defined as xacro file ,xacro Files can be used to generate urdf file . Path as follows :
Every gazebo The model should have a name mavlink_udp_port Parameters of , It defines the Gazebo And PX4 Node communication UDP port . Model xacro The file will be used to generate the... Containing your choice UDP Port of urdf Model . To define the UDP port , Please set... For each vehicle in the startup file mavlink_udp_port, See here for an example .
2. px4_sitl
1)px4_sitl adopt gazebo Defined in the model mavlink_udp_port And Gazebo Simulator communication .
2) stay PX4 SITL app End settings UDP port , You need to set... In the startup file SITL_UDP_PRT Parameters , Match the previous discussion mavlink_udp_port.
Each aircraft corresponds to a startup file rcs,rcs It contains px4 Parameters of , Path as follows :

param set SITL_UDP_PRT 14562
3)launch Start file in file rcs The path is based on the vehicle and ID Parameter generated , As shown below :
arg name=“rcS” value=" ( f i n d p x 4 ) / p o s i x − c o n f i g s / S I T L / i n i t / (find px4)/posix-configs/SITL/init/ (findpx4)/posix−configs/SITL/init/(arg est)/KaTeX parse error: Expected group after '_' at position 14: (arg vehicle)_̲(arg ID)"
3. MAVROS
- mavros Nodes can be set separately in launch In file , As shown below :

2) If you want to use ROS Control drones , You must be in the boot file rcs Set up independent MAVLink stream Port number
This port number must be the same as the boot port number mavros Of launch The port number in the file is consistent ,

边栏推荐
猜你喜欢

Use of observer mode and status mode in actual work

Installation and initialization of MariaDB database
One sentence introduction to Trojan horse

文件操作IO-Part1

Dynamic routing job

Master slave synchronization of MySQL database to realize read-write separation

C language final experiment report (student achievement management system) source code

Feisheng: Based on the Chinese word breaker ik-2 ways to build custom hot word separators Showcase & pit arrangement Showtime

Why does the verification code not refresh when clicked

Zibll子比主题V6.4.1wordpress 开心版源码下载_破解原版/直接使用/无需教程
随机推荐
ES6解构赋值
Share problems solved
重构之美:当多线程批处理任务挑起大梁 - 万能脚手架
接口中方法详解
ini解析學習文檔
MySQL index
There is a group of students' score {99, 85, 82, 63, 60}. To add a student's score, insert it into the score sequence and keep the descending order
880. decoded string at index
Is it safe to open an account online? Can you open an account to speculate on the Internet?
Summary of 2 billion redis data migration
从零开发 stylelint规则(插件)
Talking about the struct of go
MySQL summary
ES6 deconstruction assignment
MySQL advanced SQL statement
Feisheng: Based on the Chinese word breaker ik-2 ways to build custom hot word separators Showcase & pit arrangement Showtime
Title: enter two positive integers m and N to find their maximum common divisor and minimum common multiple
Multithreading advanced level
一个完整的性能测试流程
C language final experiment report (student achievement management system) source code