当前位置:网站首页>Detailed explanation of multi coordinate transformation in ROS (example + code)
Detailed explanation of multi coordinate transformation in ROS (example + code)
2022-06-12 07:08:00 【Fat fat is the sun】
Catalog
Mathematical basis of coordinate transformation
Multi coordinate transformation and static / The difference of dynamic coordinate transformation
tf Essence of coordinate transformation
Multi coordinate transformation
static state / Dynamic coordinate transformation
Release of relative relations of coordinate system
Command line form :another_static_pub.launch
Coordinate transformation :another_static_sub.cpp
Project organization structure
Mathematical basis of coordinate transformation
Four yuan number :
 https://blog.csdn.net/weixin_45590473/article/details/122884112
https://blog.csdn.net/weixin_45590473/article/details/122884112Multi coordinate transformation and static / The difference of dynamic coordinate transformation
tf Essence of coordinate transformation
You may be static / dynamic / The multi coordinate transformation made me dizzy , But as long as you recognize the essence of coordinate transformation, you will suddenly realize . No matter what kind of coordinate transformation , Its essence is to make use of tf2_ros::Buffer The relationship between the coordinates cached in the class object bases the coordinate points on X The coordinates of the coordinate system are converted to be based on Y Coordinates of the coordinate system .
Multi coordinate transformation
We use the coordinate system A、 Coordinate system B、 Coordinate system C、 Coordinate system D The mutual transformation of three coordinate systems is illustrated as an example :

To be exact lookupTransfrom The function is used to obtain the relative relationship between two coordinate systems that have never been connected in the tree view ( Complement tree view , Each pair of elements in the tree view can be connected in pairs ): Coordinate system C And coordinate system D The relative relationship between . Can I get the relative relationship between the coordinate systems in the tree view ? Sure , But there's no need , If we only use known coordinate system relations then lookupTransfrom Whether the function is present or not .
static state / Dynamic coordinate transformation

We will find that : What both have is “ call transfrom Function to convert coordinates ”. Besides , The difference between the two lies in the transformation relationship between coordinate systems , In multi coordinate system transformation, you need to call lookupTransfrom Function pair buffer The data in the buffer is calculated to obtain the conversion relationship between any two coordinate systems , And static / Dynamic coordinate system transformation relations only need to subscribe to static_tf Topic can be .
Release of relative relations of coordinate system
There are two forms of publishing the relative relations of coordinate systems : Command line form and write the source code of the publisher .
Command line form :another_static_pub.launch
<launch>
<node pkg="tf2_ros" name="son1" type="static_transform_publisher" args="1 2 3 10 30 20 /world /son1" output="screen"/>
<node pkg="tf2_ros" name="son2" type="static_transform_publisher" args="-1 -5 2 40 10 50 /world /son2" output="screen"/>
<node pkg="tf2_ros" name="son3" type="static_transform_publisher" args="-1 -5 2 40 10 50 /son1 /son3" output="screen"/>
</launch> The tree view of the coordinate system relationship formed above is as follows :

Be careful :
When we use the command line tool to static_tf When the topic transmits the relative position information of the coordinate system , All coordinate systems, no matter how interconnected, must eventually be associated with world World coordinate system ( The world coordinate system is tf2 The global reference coordinate system defined in the system ) Build relationships !
The publisher publishes
A publisher can only publish and use tf2_ros:: StaticTransformBroadcaster::sendTransfrom Function to send the relative relation of a pair of coordinate systems :
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "tf2/LinearMath/Quaternion.h"
#include "geometry_msgs/TransformStamped.h"
int main(int argc,char* argv[])
{
setlocale(LC_ALL,"");
// initial the node
ros::init(argc,argv,"static_pub");
// create publisher
tf2_ros::StaticTransformBroadcaster pub;
// organize the data
geometry_msgs::TransformStamped data;
data.header.frame_id = "base_link";
data.header.stamp = ros::Time::now();
data.child_frame_id = "laser";
// set translation
data.transform.translation.x = 0.1;
data.transform.translation.y = 0.5;
data.transform.translation.z = 0.3;
// set rotation
tf2::Quaternion qtn;
qtn.setRPY(30,10,5);
data.transform.rotation.w = qtn.getW();
data.transform.rotation.x = qtn.getX();
data.transform.rotation.y = qtn.getY();
data.transform.rotation.z = qtn.getZ();
// publish data
ros::Rate rate(1);
while(ros::ok()){
pub.sendTransform(data);
rate.sleep();
}
return 0;
} Coordinate transformation :another_static_sub.cpp
#include "ros/ros.h"
#include "tf2_ros/buffer.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"
#include "tf2_ros/transform_listener.h"
#include "geometry_msgs/TransformStamped.h"
#include "geometry_msgs/PointStamped.h"
int main(int argc,char* argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"another_static_sub");
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
ros::Rate rate(1);
while(ros::ok()){
try
{
// Yes buffer The relationship between two pairs in the coordinate system is calculated and stored in buffer And variables Son12Son2 in
geometry_msgs::TransformStamped Son12Son2 = buffer.lookupTransform("son2","son1",ros::Time(0));
geometry_msgs::PointStamped PointInSon1;
PointInSon1.header.frame_id = "son3";
PointInSon1.header.stamp = ros::Time(); // ros::Time(0) perhaps ros::Time() All possible
PointInSon1.point.x = 1;
PointInSon1.point.y = 2;
PointInSon1.point.z = 3;
// call buffer The central coordinate system son2 And the coordinate system son1 The conversion relationship between the calculated coordinate points is based on son2 Coordinates of the coordinate system
geometry_msgs::PointStamped PointInSon2 = buffer.transform(PointInSon1,"son2");
ROS_INFO("PointInSon2:%f,%f,%f",PointInSon2.point.x,PointInSon2.point.y,PointInSon2.point.z);
}
catch(const std::exception& e)
{
std::cerr << e.what() << '\n';
}
rate.sleep();
}
return 0;
} Be careful :
In the program Son12Son2 Variables are not used , But the sentence must have . because lookupTransfrom The function is not only used to output a data type that represents the transformation relationship of the coordinate system , At the same time, the data type representing the transformation relationship of the coordinate system is also stored in buffer in . That is to say, there is no such sentence , that buffer There is no coordinate system son1 To son2 The transformation of , , in turn, transfrom The function cannot call the coordinate system transformation relationship to complete the transformation of coordinate points .
Why not use a CPP Source files to complete coordinate transformation ?
Project organization structure

Running results

边栏推荐
猜你喜欢
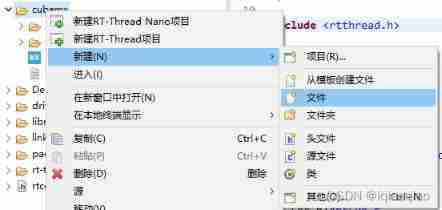
RT thread studio learning (I) new project

Planning and design of 1000 person medium-sized campus / enterprise network based on ENSP and firewall (with all configuration commands)

Throw away the ugly toast. The movable toast is more interesting

企业微信官方 加解密库 PHP7版本报错 mcrypt_module_open 未定义方法 并且被PHP抛弃 解决方法使用 openssl解决

Scons编译IMGUI

esp32 hosted
5 ROS simulation modeling (4-navigation navigation simulation)
Vscode Common plug - in
Scons compiling imgui

Database syntax related problems, solve a correct syntax
随机推荐
Leetcode: Sword finger offer 67 Convert string to integer [simulation + segmentation + discussion]
Esp8266 firmware upgrade method (esp8266-01s module)
[Li Kou] curriculum series
循环链表和双向链表—课上课后练
Node, topic, parameter renaming and global, relative and private namespaces in ROS (example + code)
node:打不开/node:已拒绝访问
Interview intelligence questions
New knowledge: monkey improved app crawler
Unable to load bean of class marked with @configuration
leetcode:剑指 Offer 63. 股票的最大利润【记录前缀最小和 or 无脑线段树】
RT thread studio learning (IX) TF Card File System
1.3-1.9 summary
[image denoising] image denoising based on nonlocal Euclidean median (nlem) with matlab code
Apache POI import export excel file
Drawing grid navigation by opencv map reading
8 IO Library
d的自动无垃集代码.
Kali and programming: how to quickly build the OWASP website security test range?
Pyhon的第六天
Cron expression and website generation