当前位置:网站首页>3D激光SLAM:LeGO-LOAM论文解读---点云分割部分
3D激光SLAM:LeGO-LOAM论文解读---点云分割部分
2022-07-31 10:34:00 【月照银海似蛟龙】
点云分割
分割方法:
Pt是t时刻的一帧点云数据
pi是Pt中的一个点
首先需要把Pt映射到深度图像上去
映射的深度图像的分辨率是 1800*16 .1800就是一帧激光雷达点云里面的每一个scan上有1800个点,16就是有16个scan
VLP的水平分辨率为0.2° 垂直分辨率为2°
每个有效的点为深度图像的一个像素,像素的值就是该点到雷达中心的距离
就相当于:

地面点分类
由于在场景中可能是在斜坡上面进行运动,所以没有假设地面点是一个水平面
通过深度图像的每一列进行地面点的提取,然后再做点云的分类。
在后面的点云分类中,地面点就不参与了,因为它已经分完了
其它点分类及过滤
之后基于图像的分割方法,将点云分成很多簇
同一簇的点分配上唯一的标签
地面点是一种特殊类型的簇
对点云进行聚类分割可以提高处理效率和特征提取精度
假设机器人在一个噪声很大的环境下,有些物体的尺寸很小比如树叶,或者其它不可靠的特征点。相邻帧几乎不可能看到同一个树叶
所以做好先去掉这些点
为了实现快速和可靠的特征提取,把小于30个点的聚类进行过滤,即不会在这些点中进行特征提取
测试
其可视化的效果 如下
a图是原始的点云可视化效果
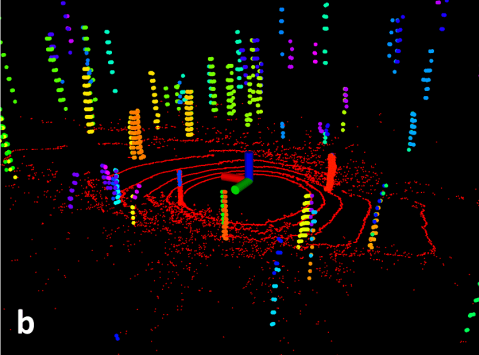
做完聚类之后,去除聚类小于30的点后保留的点,红色的点是地面点
在聚类之后剩下的点,代表比较大的目标,比如建筑物、树干、地面点,可以用这些点做里程计的位姿估计
同时这些点会被存储到深度图像中去,过滤的点则会被深度图像删去。
保留的点会存储三种属性
- 是否是地面点的标签
- 在深度图像的行列索引
- 距离,点到雷达中心的距离
然后利用这些信息再做特征提取
原文
边栏推荐
猜你喜欢







随机推荐
darknet 硬件软件环境的设置和检测
SQL——左连接(Left join)、右连接(Right join)、内连接(Inner join)
FCN中制作自己的数据集并进行训练
sql中 exists的用法
《JUC并发编程 - 高级篇》06 - 共享模型之不可变(不可变类的设计 | 不可变类的使用 | 享元模式)
半个月时间把MySQL重新巩固了一遍,梳理了一篇几万字 “超硬核” 文章!
Redis缓存面临的缓存雪崩问题
Build finished with errors/Executable Not Found
Windows系统Mysql8版本的安装教程
恋爱期间的赠与能否撤销
【云原生监控系列第一篇】一文详解Prometheus普罗米修斯监控系统(山前前后各有风景,有风无风都很自由)
WSL2安装.NET 6
前序、后序及层次遍历实现二叉树的序列化与反序列化
因存在自燃安全隐患,宝马7系和5系紧急召回,合计超过5.7万辆
【LeetCode】203.移除链表元素
NowCoderTOP23-27二叉树遍历——持续更新ing
Dart Log tool class
Business-(Course-Chapter-Subsection) + Course Publishing Some Business Ideas
The fifth chapter
GCD简单了解