当前位置:网站首页>在STM32中使用printf函数
在STM32中使用printf函数
2022-08-05 05:58:00 【*黑心萝卜三条杠*】
一、目的
利用printf函数使得输出打印到串口中。
二、工作原理
我们在C语言中为什么能够调用printf函数打印数据到控制台中,那是因为printf函数又调用了fputc()函数。那么我们我们可不可以说printf函数之所以能够打印数据到控制台中几乎都是fput()函数的功劳呢?答案是显而易见的。因此,在这我们只需要重写fput函数即可。
三、代码展示
1、重写fput()函数
在这里我们需要注意的是,在实际的代码运行过程中该函数是自调用的,不需要我们刻意调用它。
/****************************************************************************** * 函数功能 相当于串口发送数据 * 参数 * 返回值 * 注意 该函数是stdio.h文件中默认函数 当我们使用printf函数时会自调用 * 这里的printf函数跟C语言的printf用法一样 ******************************************************************************/
int fputc(int ch,FILE *p)
{
USART_SendData(USART1,(u8)ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
2、GPIO初始化
/**************************************************************** * 函数功能 printf的初始化 * 参数 无 * 返回值 无 ****************************************************************/
void printf_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 打开端口时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
/* 配置GPIO的模式和IO口 */
//选择TX 串口输出PA9
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
//复用推挽输出
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
/* 初始化串口输入IO */
//选择RX 串口输入PA10
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
//模拟输入
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
/* USART串口初始化 */
//波特率设置为9600
USART_InitStructure.USART_BaudRate=9600;
//数据长8位
USART_InitStructure.USART_WordLength=USART_WordLength_8b;
//1位停止位
USART_InitStructure.USART_StopBits=USART_StopBits_1;
//无效验
USART_InitStructure.USART_Parity=USART_Parity_No;
//失能硬件流
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
//开启发送和接受模式
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_Init(USART1,&USART_InitStructure);
/* 使能USART1 */
USART_Cmd(USART1, ENABLE);
//使能或者失能指定的USART中断 接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//清除USARTx的待处理标志位
USART_ClearFlag(USART1,USART_FLAG_TC);
}
3、一个简单的hello输出
int main()
{
printf_init();
while(1)
{
printf("hello!");
}
}
四、keil中的配置
实际上直接使用上述代码是不能够完成我们最初的设计目的的,单单这样它不会输出任何东西到串口中,我们还需要在keil中小小的配置一下。样例如下图: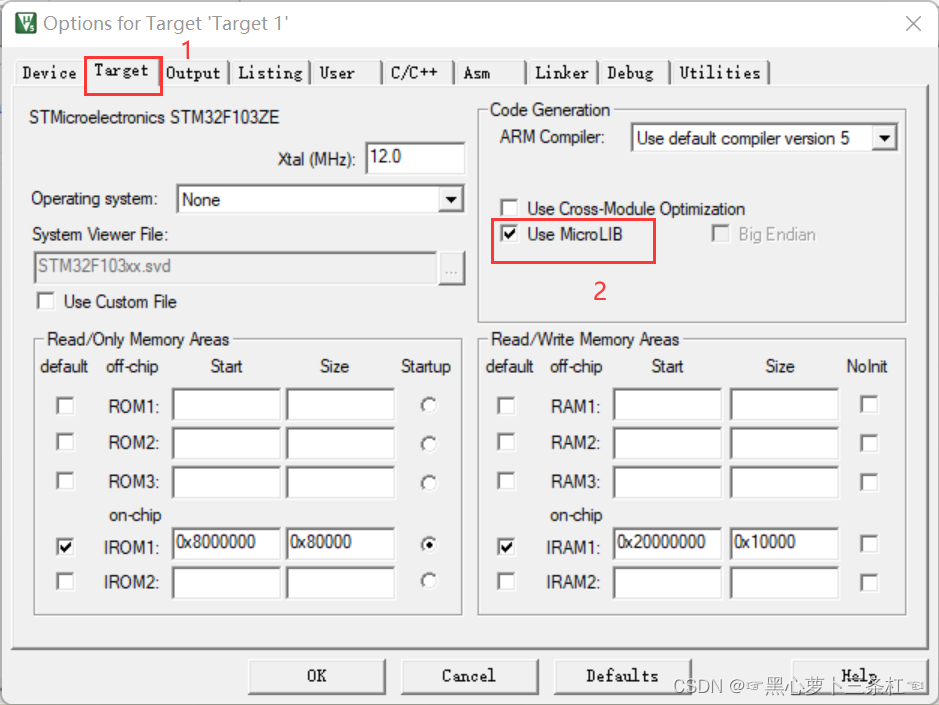
五、总结
小编个人认为,在这个项目中,实际上的printf函数就是一个串口输出函数,只不过它相比之前我们直接调用串口发送函数更加方便、更加实用,无非是在GPIO的定义与初始化上有点儿区别。因此,我们完全可以将printf函数看成一个串口发送函数。
边栏推荐
猜你喜欢
GetEnumerator method and MoveNext and Reset methods in Unity
2022杭电多校六 1007-Shinobu loves trip(同余方程)
多用户商城多商户B2B2C拼团砍价秒杀支持小程序H5+APP全开源
单片机原理与应用复习
Collision, character controller, Cloth components (cloth), joints in the Unity physics engine
MySQL的主从模式搭建
VS Code私有服务器部署(私有化)

设置文本向两边居中展示
Source code analysis of Nacos configuration service (full)
更改小程序原生radio的颜色及大小
随机推荐
邮件管理 过滤邮件
cs231n learning record
淘宝客APP带自营商城本地生活CPS外卖优惠电影票话费更新渠道跟单生活特权V3
LeetCode practice and self-comprehension record (1)
单片机原理与应用复习
(2022杭电多校六)1012-Loop(单调栈+思维)
如何将.asd恢复为Word文档
在小程序中关于js数字精度丢失的解决办法
概率与期望部分题解
白鹭egret添加新页面教程,如何添加新页面
Come, come, let you understand how Cocos Creator reads and writes JSON files
《PyTorch深度学习实践》第十一课(卷积神经网络CNN高级版)
What is the website ICP record?
FPGA解析B码----连载4
MyCat配置文件
js 使用雪花id生成随机id
Rapid Medical超小体积且唯一可调的取栓器获得FDA核准
LaTeX 图片加标题 文本分栏自动换行
【5】Docker中部署MySQL
export使用