当前位置:网站首页>Cubemx DMA notes
Cubemx DMA notes
2022-07-02 04:56:00 【@Residual dream】
The timer is on DMA: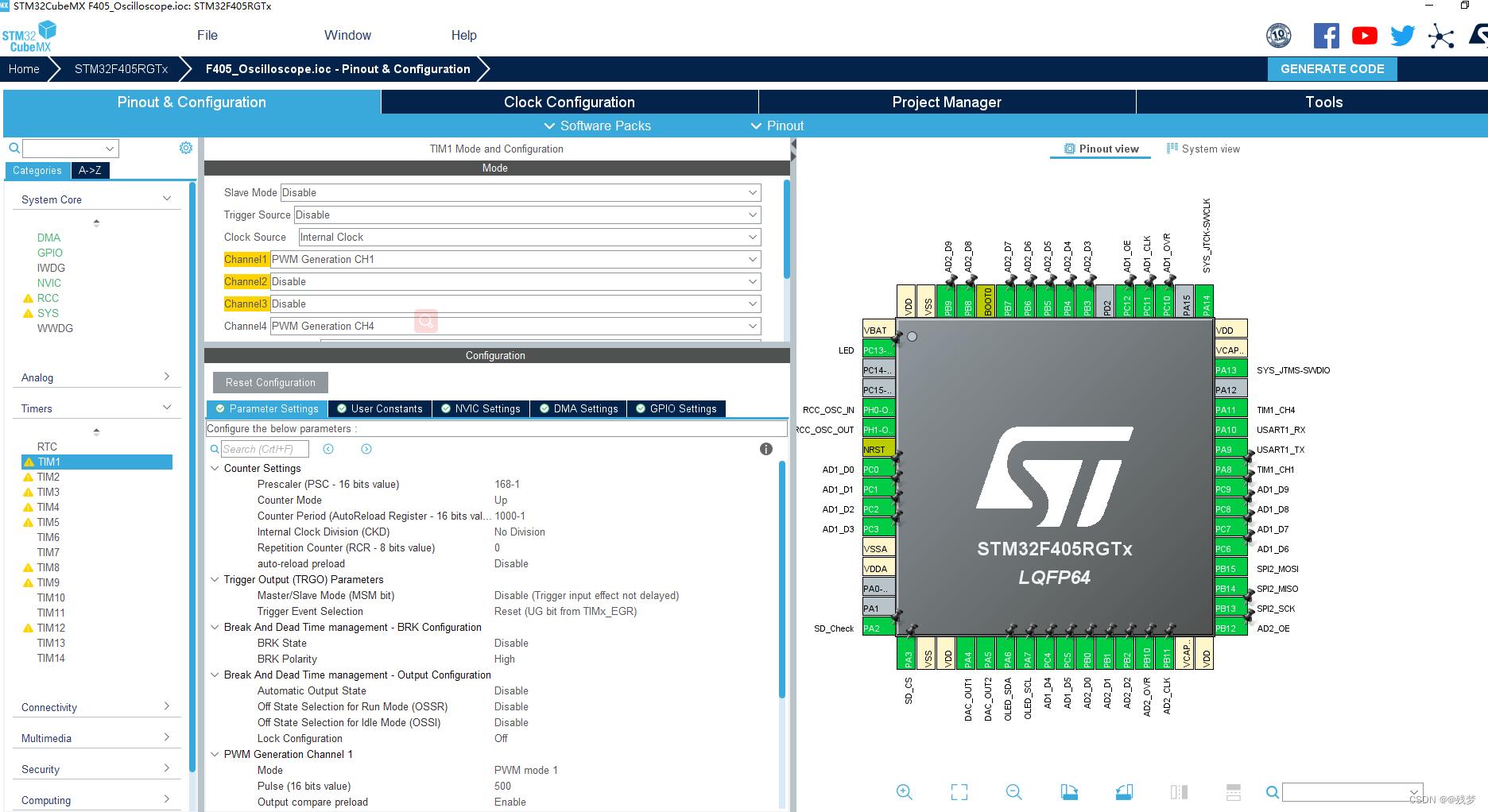

About DMA Initial code :
static void TIM1_CH4_DMA2_TransferComplete_Callback(DMA_HandleTypeDef *hdma)
{
//printf("TIM1_CH4_DMA2_TransferComplete_Callback\r\n");
//_LED_TURN;
}
uint32_t gpiosta[2] = {
0xFFFF0000,0x0000FFFF};
void TIM1_DMA2_Init(void)
{
HAL_NVIC_DisableIRQ(TIM1_UP_TIM10_IRQn);
HAL_NVIC_DisableIRQ(DMA2_Stream5_IRQn);
HAL_NVIC_DisableIRQ(DMA2_Stream1_IRQn);// Disable interrupting updates
#if 0//TIM1_UP Of DMA
htim1.hdma[TIM_DMA_ID_UPDATE]->XferCpltCallback = TIM1_CH1_DMA2_TransferComplete_Callback;
HAL_DMA_Start_IT(&hdma_tim1_up,(uint32_t)(&gpiosta[0]), (uint32_t)(&(GPIOC->BSRR)),2);//(uint32_t)(&(GPIOC->BSRR))
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_UPDATE);
#else//TIM1_CH1 + TIM1_CH4 Of DMA
htim1.hdma[TIM_DMA_ID_CC1]->XferCpltCallback = TIM1_CH1_DMA2_TransferComplete_Callback;
HAL_DMA_Start_IT(&hdma_tim1_ch1,(uint32_t)(&gpiosta[0]), (uint32_t)(&(GPIOB->BSRR)),2);
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_CC1);
htim1.hdma[TIM_DMA_ID_CC4]->XferCpltCallback = TIM1_CH4_DMA2_TransferComplete_Callback;// Transfer complete callback function
HAL_DMA_Start_IT(&hdma_tim1_ch4_trig_com,(uint32_t)(&gpiosta[0]), (uint32_t)(&(GPIOC->BSRR)),2);// take gpiosta Data moved to GPIOC->BSRR
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_CC4);// Enable timer update DMA request
#endif
}
The main function starts :
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);
TIM1_DMA2_Init();
while(1)
{
HAL_Delay(3000);
}
About tim.c All the code :
/** ****************************************************************************** * @file tim.c * @brief This file provides code for the configuration * of the TIM instances. ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2022 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim1;
DMA_HandleTypeDef hdma_tim1_ch1;
DMA_HandleTypeDef hdma_tim1_ch4_trig_com;
/* TIM1 init function */
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {
0};
TIM_MasterConfigTypeDef sMasterConfig = {
0};
TIM_OC_InitTypeDef sConfigOC = {
0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {
0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 1-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 168/2-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = htim1.Init.Period/2;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspInit 0 */
/* USER CODE END TIM1_MspInit 0 */
/* TIM1 clock enable */
__HAL_RCC_TIM1_CLK_ENABLE();
/* TIM1 DMA Init */
/* TIM1_CH1 Init */
hdma_tim1_ch1.Instance = DMA2_Stream1;
hdma_tim1_ch1.Init.Channel = DMA_CHANNEL_6;
hdma_tim1_ch1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_tim1_ch1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim1_ch1.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim1_ch1.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_tim1_ch1.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_tim1_ch1.Init.Mode = DMA_CIRCULAR;
hdma_tim1_ch1.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_tim1_ch1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim1_ch1) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(tim_baseHandle,hdma[TIM_DMA_ID_CC1],hdma_tim1_ch1);
/* TIM1_CH4_TRIG_COM Init */
hdma_tim1_ch4_trig_com.Instance = DMA2_Stream4;
hdma_tim1_ch4_trig_com.Init.Channel = DMA_CHANNEL_6;
hdma_tim1_ch4_trig_com.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_tim1_ch4_trig_com.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim1_ch4_trig_com.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim1_ch4_trig_com.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_tim1_ch4_trig_com.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_tim1_ch4_trig_com.Init.Mode = DMA_CIRCULAR;
hdma_tim1_ch4_trig_com.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_tim1_ch4_trig_com.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim1_ch4_trig_com) != HAL_OK)
{
Error_Handler();
}
/* Several peripheral DMA handle pointers point to the same DMA handle. Be aware that there is only one stream to perform all the requested DMAs. */
__HAL_LINKDMA(tim_baseHandle,hdma[TIM_DMA_ID_CC4],hdma_tim1_ch4_trig_com);
__HAL_LINKDMA(tim_baseHandle,hdma[TIM_DMA_ID_TRIGGER],hdma_tim1_ch4_trig_com);
__HAL_LINKDMA(tim_baseHandle,hdma[TIM_DMA_ID_COMMUTATION],hdma_tim1_ch4_trig_com);
/* USER CODE BEGIN TIM1_MspInit 1 */
/* USER CODE END TIM1_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
if(timHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspPostInit 0 */
/* USER CODE END TIM1_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM1 GPIO Configuration PA8 ------> TIM1_CH1 PA11 ------> TIM1_CH4 */
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM1_MspPostInit 1 */
/* USER CODE END TIM1_MspPostInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspDeInit 0 */
/* USER CODE END TIM1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM1_CLK_DISABLE();
/* TIM1 DMA DeInit */
HAL_DMA_DeInit(tim_baseHandle->hdma[TIM_DMA_ID_CC1]);
HAL_DMA_DeInit(tim_baseHandle->hdma[TIM_DMA_ID_CC4]);
HAL_DMA_DeInit(tim_baseHandle->hdma[TIM_DMA_ID_TRIGGER]);
HAL_DMA_DeInit(tim_baseHandle->hdma[TIM_DMA_ID_COMMUTATION]);
/* USER CODE BEGIN TIM1_MspDeInit 1 */
/* USER CODE END TIM1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM1)
{
//_LED_TURN;
//printf("HAL_TIM_PeriodElapsedCallback\r\n");
}
}
static void TIM1_CH1_DMA2_TransferComplete_Callback(DMA_HandleTypeDef *hdma)
{
//printf("TIM1_CH1_DMA2_TransferComplete_Callback\r\n");
//_LED_TURN;
}
static void TIM1_CH4_DMA2_TransferComplete_Callback(DMA_HandleTypeDef *hdma)
{
//printf("TIM1_CH4_DMA2_TransferComplete_Callback\r\n");
//_LED_TURN;
}
uint32_t gpiosta[2] = {
0xFFFF0000,0x0000FFFF};
void TIM1_DMA2_Init(void)
{
HAL_NVIC_DisableIRQ(TIM1_UP_TIM10_IRQn);
HAL_NVIC_DisableIRQ(DMA2_Stream5_IRQn);
HAL_NVIC_DisableIRQ(DMA2_Stream1_IRQn);// Disable interrupting updates
#if 0//TIM1_UP Of DMA
htim1.hdma[TIM_DMA_ID_UPDATE]->XferCpltCallback = TIM1_CH1_DMA2_TransferComplete_Callback;
HAL_DMA_Start_IT(&hdma_tim1_up,(uint32_t)(&gpiosta[0]), (uint32_t)(&(GPIOC->BSRR)),2);//(uint32_t)(&(GPIOC->BSRR))
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_UPDATE);
#else//TIM1_CH1 + TIM1_CH4 Of DMA
htim1.hdma[TIM_DMA_ID_CC1]->XferCpltCallback = TIM1_CH1_DMA2_TransferComplete_Callback;
HAL_DMA_Start_IT(&hdma_tim1_ch1,(uint32_t)(&gpiosta[0]), (uint32_t)(&(GPIOB->BSRR)),2);
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_CC1);
htim1.hdma[TIM_DMA_ID_CC4]->XferCpltCallback = TIM1_CH4_DMA2_TransferComplete_Callback;// Transfer complete callback function
HAL_DMA_Start_IT(&hdma_tim1_ch4_trig_com,(uint32_t)(&gpiosta[0]), (uint32_t)(&(GPIOC->BSRR)),2);// take gpiosta Data moved to GPIOC->BSRR
__HAL_TIM_ENABLE_DMA(&htim1, TIM_DMA_CC4);// Enable timer update DMA request
#endif
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
About DMA The peripheral address used must meet DMA Transmission restrictions for : Compared with DMA1 Can't visit AHB1 Peripheral , That is, for example, not DMA1 Move GPIOC\GPIOB And other peripheral data transmission 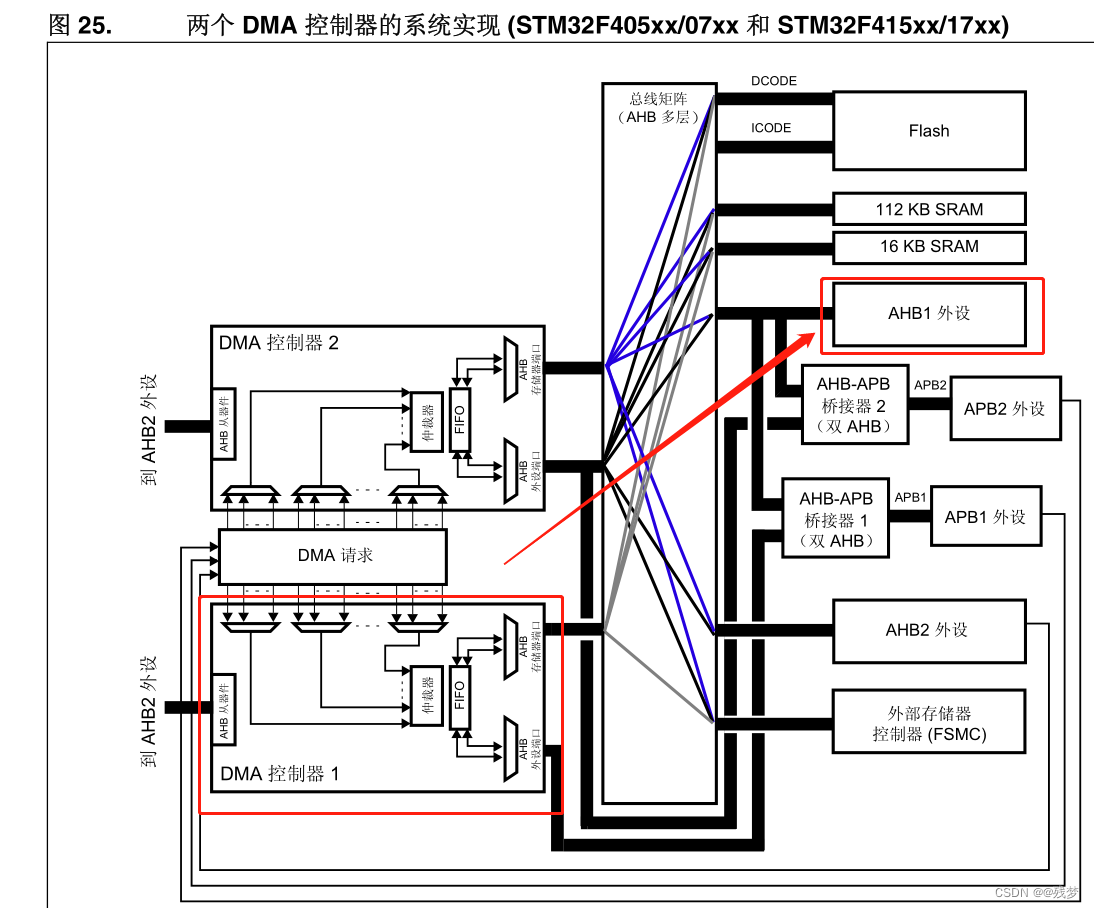

边栏推荐
- Ten thousand volumes are known to all, and one page of a book is always relevant. TVP reading club will take you through the reading puzzle!
- win10 磁盘管理 压缩卷 无法启动问题
- Mysql database learning
- The underlying principle of go map (storage and capacity expansion)
- VMware installation win10 reports an error: operating system not found
- Use of typescript classes
- 10 minute quick start UI automation ----- puppeter
- Introduction to Luogu 3 [circular structure] problem list solution
- Video cover image setting, put cover images into multiple videos in the simplest way
- June book news | 9 new books are listed, with a strong lineup and eyes closed!
猜你喜欢
![[bus interface] Axi interface](/img/ee/95ade7811ec2c37fb67a77f0b6ae2a.jpg)







随机推荐
Mathematical problems (number theory) trial division to judge prime numbers, decompose prime factors, and screen prime numbers
Pytest learning ----- pytest Interface Association framework encapsulation of interface automation testing
初学爬虫-笔趣阁爬虫
Markdown编辑语法
C# 基于MQTTNet的服务端与客户端通信案例
Beginner crawler - biqu Pavilion crawler
Embedded-c language-9-makefile/ structure / Consortium
js面试收藏试题1
Mathematical knowledge (Euler function)
What are the rules and trading hours of agricultural futures contracts? How much is the handling fee deposit?
geotrust ov多域名ssl證書一年兩千一百元包含幾個域名?
Super detailed pycharm tutorial
Leetcode- insert and sort the linked list
Mouse events in JS
6月书讯 | 9本新书上市,阵容强大,闭眼入!
Markdown edit syntax
LeetCode-对链表进行插入排序
Tawang food industry insight | current situation, consumption data and trend analysis of domestic infant complementary food market
正大美欧4的主账户关注什么数据?
Change deepin to Alibaba image source