当前位置:网站首页>图像识别-数据采集
图像识别-数据采集
2022-07-02 06:34:00 【懵懂的梦花火】
1 图像采集说明
算力、模型和数据是人工智能的三个要素。当一个算法模型设计好后,就需要大量标注好的数据去训练机器,从而使得机器更加“智能”,得以在实际应用场景中施展拳脚。若希望算法进一步提升性能,则需要更多精细化的数据加以训练,不断迭代。可以说,AI的发展,数据是基础,也是关键。
1.1图像质量
根据从目标图像中提取的自然特征来检测图像目标,然后将其与实时摄像机图像中的特征进行比较。尽管评级较低的目标图形通常可以很好地检测和跟踪。为了获得最佳效果,要尽可能的使用以下图像: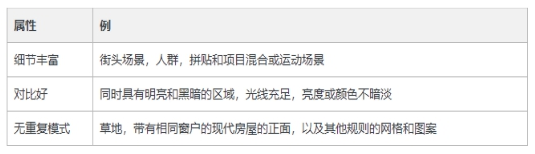
表1-1 优质图像属性表
1.2 相机自动对焦
如果目标在相机视图中没有很好地聚焦,则相机图像结果可能会模糊并且目标细节可能难以检测。结果,检测和跟踪性能可能受到负面影响。
建议使用适当的“相机对焦模式”以确保最佳的相机对焦条件。
请尝试连续自动对焦模式(FOCUS_MODE_CONTINUOUS_AUTO),因为它可以让您的设备随着视图的变化自动调整焦点。
1.3 图像采集的维度
首先要考虑到实际的应用场景,在实际的应用场景下来考虑。如:转辙机考核场景的拍摄角度,考官与转辙机的相对位置和视线夹角需在一定的合理范围内(角度30°~ 60°,距离60cm ~ 150cm)。从仿生学的角度思考问题。
图像像素:图像像素越大,保存的图片信息越多。但过大的图像会给模型训练和数据带来很多问题,如:增加模型的训练成本、提高图像采集和部署的硬件成本、降低检测和识别的实时性等。暂时使用480p、720P和1080P的图像进行验证。
以下是采集图像时应该考虑的维度或因素: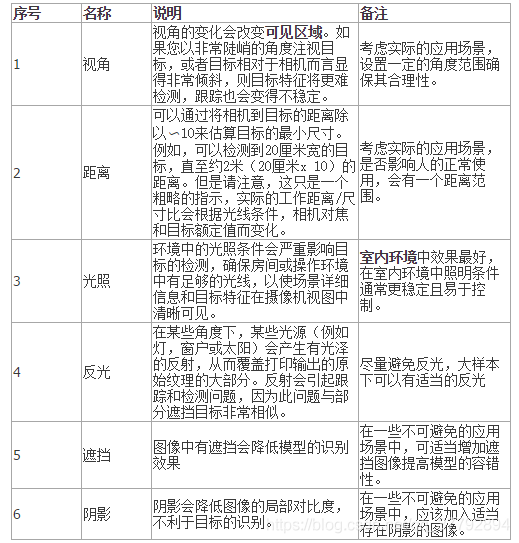
表1-2图像采集维度说明表
2 图像采集案例
从仿生学的角度思考问题,以人的视角来采集图片,以人的认知来识别物体。
2.1 图像采集
采集什么样的数据,就意味着我们的模型有可能学到什么特征。我们喂给模型的数据就是我们需要检测目标的场景
2.1 角度变化原则的原则
从仿生学的角度思考问题,以人的视角来采集图片。图片采集的角度要贴合实际需求,并结合相应的场景做出调整。
一般的图像采集要求为:多角度,全方位的采集图片。如图2所示,以人的视角来考量采集图像时摄像机的角度、距离,以及摄像机本身的高度。这里距离转辙机距离设定为(0.8到1.5M)。图3摄像头的高度范围(1.5~1.8M)摄像头的倾斜角度随距离和高度进行调整,保证转折机始终在图像的中心位置。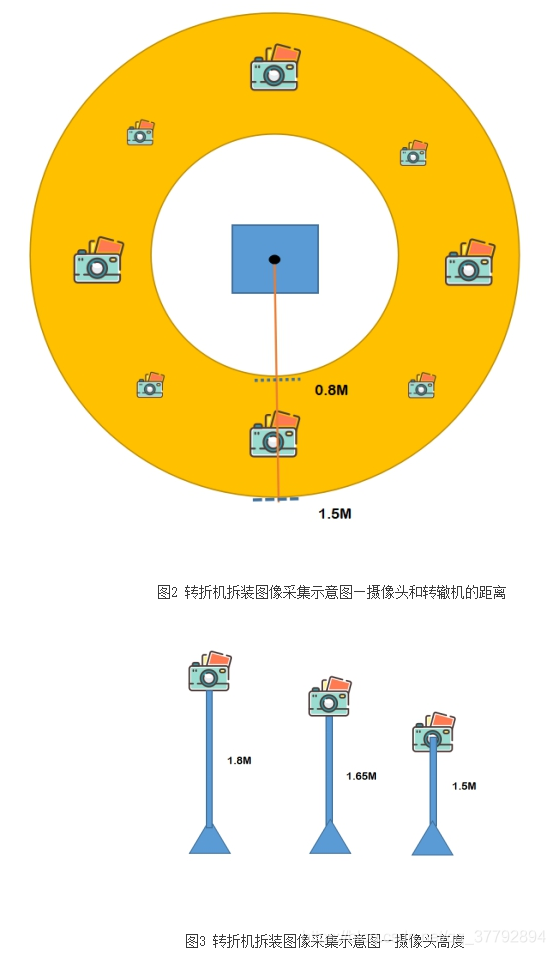
2.2 转折机图像采集

识别道岔转折机的各个部件,需要识别的部件图:
相机高度与距离尝试,相机角度对准转折机的中间位置
数据集迭代过程表
小数据集的情况下,想要达到比较好的识别效果,需要根据使用场景,对数据集进行不断修正。标记好的数据,再使用前最好多检查几遍。
项目需求不同,对样本要求也会不同,合理的根据项目需求,采集合适的数据,标定出合适的样本。过度的追求泛化效果,会造成不必要的浪费。
边栏推荐
- 西瓜书--第六章.支持向量机(SVM)
- 数构(C语言--代码有注释)——第二章、线性表(更新版)
- Typora安装包分享
- In depth analysis of how the JVM executes Hello World
- Matplotlib swordsman - a stylist who can draw without tools and code
- hystrix 实现请求合并
- Solutions to Chinese garbled code in CMD window
- Demand delineation executive summary
- 记录下对游戏主机配置的个人理解与心得
- Difference between redis serialization genericjackson2jsonredisserializer and jackson2jsonredisserializer
猜你喜欢

概念到方法,绝了《统计学习方法》——第三章、k近邻法

Creation and jump of activity
![[staff] time sign and note duration (full note | half note | quarter note | eighth note | sixteenth note | thirty second note)](/img/bf/2b0b9c640bdad2c55293f905a22055.jpg)
[staff] time sign and note duration (full note | half note | quarter note | eighth note | sixteenth note | thirty second note)

概率还不会的快看过来《统计学习方法》——第四章、朴素贝叶斯法

Enterprise level SaaS CRM implementation
Break the cocoon | one article explains what is the real cloud primordial

In depth analysis of how the JVM executes Hello World

Insight into cloud native | microservices and microservice architecture

数构(C语言)——第四章、矩阵的压缩存储(下)
Microservice practice | fuse hytrix initial experience
随机推荐
Microservice practice | load balancing component and source code analysis
微服务实战|声明式服务调用OpenFeign实践
记录下对游戏主机配置的个人理解与心得
hystrix 实现请求合并
Oracle modifies tablespace names and data files
自定义Redis连接池
Operation and application of stack and queue
Discussion on improving development quality and reducing test bug rate
Solutions to Chinese garbled code in CMD window
双非本科生进大厂,而我还在底层默默地爬树(上)
Failed to configure a DataSource: ‘url‘ attribute is not specified and no embedd
Chrome用户脚本管理器-Tampermonkey 油猴
C语言之分草莓
攻防世界-Web进阶区-unserialize3
分布式锁的这三种实现方式,如何在效率和正确性之间选择?
JDBC回顾
VIM operation command Encyclopedia
Matplotlib swordsman line - first acquaintance with Matplotlib
AMQ 4043 solution for errors when using IBM MQ remote connection
View the port of the application published by was