当前位置:网站首页>Opencv Harris corner detection
Opencv Harris corner detection
2022-07-03 10:05:00 【Σίσυφος one thousand and nine hundred】
One 、 Classification of image features
The following images are from B Station Admiral opencv A screenshot of instructor Jia Zhigang's courseware
1、 edge
2、 Corner point ( Point of interest ): If a small change of a certain point in any direction will cause a great change in gray level , Then we call it a corner 
The corner is located at the intersection of the two edges , Represents the point in the direction of the change of the two edges ,, So they are two-dimensional features that can be accurately located , It can even achieve sub-pixel accuracy , And its image gradient has a high change , This change can be used to help detect corners
3、 speckle (blobs)
Two 、 Corner detection algorithm
thought :
Use a fixed window to slide the image in any direction , Compare the two situations before and after sliding , The degree of grayscale change of pixels in the window , If there is sliding in any direction , They all have large gray scale changes , Then we can think of the window as having corners .
In the current field of image processing , Corner detection algorithms can be classified into three categories :
- Corner detection based on gray image : Based on the gradient 、 Template based and template based gradient combination
- Corner detection based on binary image :Harris Corner detection algorithm 、KLT Corner detection algorithm and its application SUSAN Corner detection algorithm
- Corner detection based on contour curve
There are several specific descriptions of corners :
- First derivative ( That is, the gradient of gray ) The pixel corresponding to the local maximum of ;
- The intersection of two or more edges ;
- Points in the image where the change rate of gradient value and gradient direction is very high ;
- The first derivative at the corner is the largest , The second derivative is zero , Indicates the direction in which the edge of an object changes discontinuously .
3、 ... and 、Harris Corner detection principle
From the above, we can know what corner points are , Then let's move the window first , It is described as follows :
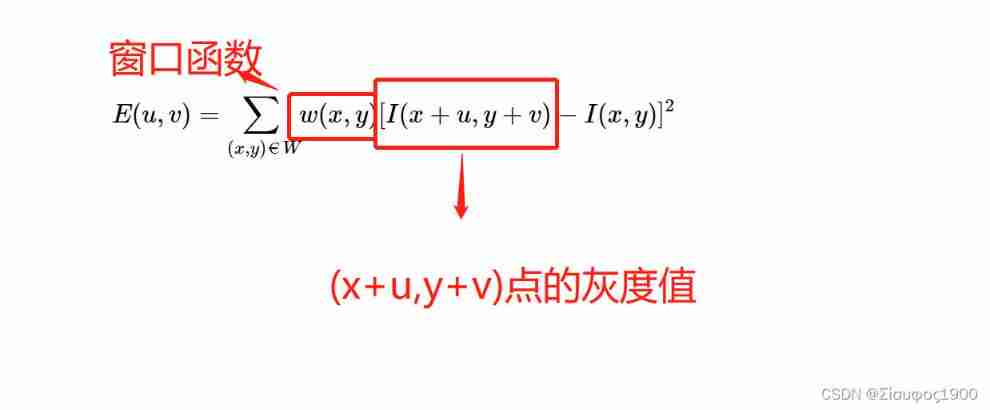
w(x,y) It's a window function , The simplest case is the window W Corresponding to all pixels in w The weight coefficients are 1. But sometimes , We will w(x,y) The function is set to window W Binary positive distribution with the center as the origin . If the window W When the center point is a corner , Before and after moving , This point contributes the most to the gray change ; And leave the window W center ( Corner point ) Far away , The gray changes of these points are almost flat , The weight coefficients of these points , You can set a small value , To show that this point contributes little to the gray change , Then we naturally think of using binary Gaussian function to represent window function .
Then we will review the content of mathematical analysis about Taylor series , Just like any continuous periodic signal can be composed of a set of appropriate sinusoidal curves , Any expression can be approximated infinitely by Taylor formula :

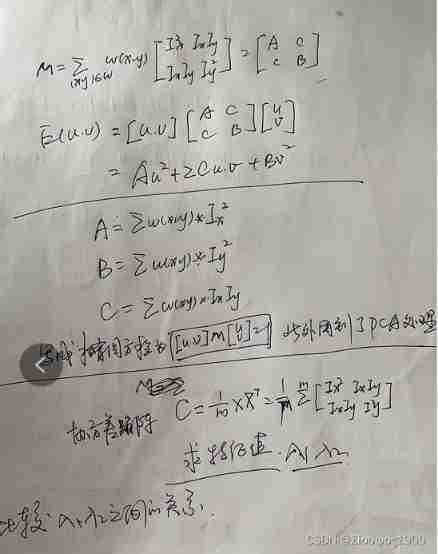
So let's bring Taylor's formula into the above calculation E(u,v) in :

Next is how to solve M This matrix
Are we directly seeking the above E(u,v) Value to judge the corner ?Harris Corner detection does not do this , Instead, you can do this by x The gradient in the direction and y The gradient in the direction is statistically analyzed . Here we use Ix and Iy For the axis , Therefore, the gradient coordinates of each pixel can be expressed as (Ix,Iy). For flat areas , Edge region and corner region are analyzed :

Please pay attention to the following picture
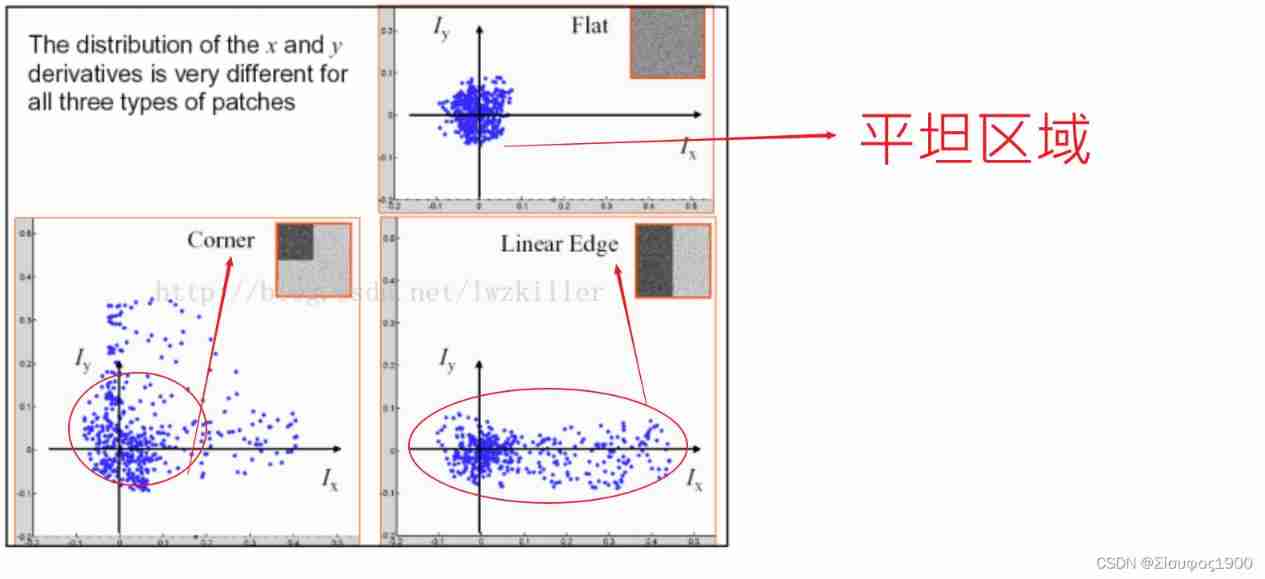
Note the characteristics of these three areas :
- Each pixel on the flat area corresponds to (Ix,Iy) The coordinates are distributed near the origin , It's easy to understand , For pixels in flat areas , Although their gradient directions are different , But its amplitude is not very large , So they all gather near the origin ;
- There is a coordinate axis scattered in the edge area , As for which coordinate the data distribution is scattered, we can't generalize , This depends on the specific position of the edge on the image , If the edge is horizontal or vertical , that Iy Axial direction or Ix The data distribution in the direction is relatively scattered ;
- Corner area x、y The gradient distribution in the direction is relatively scattered .
Can we judge which areas have corners according to these characteristics

Compare the relationship between two eigenvalues : You can't subtract

Conclusion :
Subtraction is problematic , So how do we use λ1λ2 To express the difference can reflect some of the above conclusions ?
Define a new function R 
det(M)=λ1λ2, determinant
trace(M)=λ1+λ2 trace ;
K Is a comparative value , It is a fixed value we give

R Depending on MM The eigenvalues of the ,
For corners |R| It's big ,
Flat areas |R| Very small
Marginal R negative ;
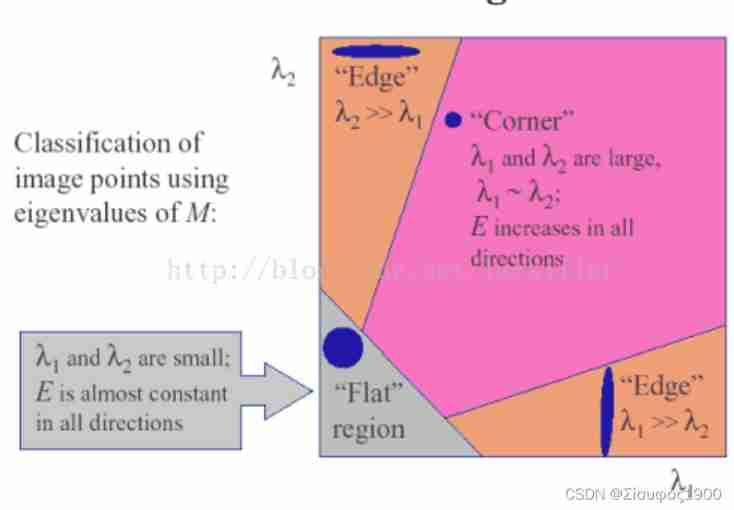
- When the eigenvalues are relatively large , That is, the window contains corners ;
- The eigenvalue is a large one , A smaller one , The window contains edges ;
- The eigenvalues are relatively small , The window is in a flat area ;
Four 、Harris Corner detection steps
1、 Calculate the image x、y Gradient in direction Ix Iy

2、 Calculation Ix* Iy

3、 Use Gaussian function to I2x、I2y、IxIy Gaussian weighting ( take σ=2,ksize=3), The center of calculation is (x,y) The window of WW The corresponding matrix M;

4、 Calculation R
5、 Filtration is greater than t Of R value 
5、 ... and 、 cornerHarris
void cornerHarris(
InputArray src, // It needs to be a single channel 8 Bit or floating point image
OutputArray dst, // Harris Output result of corner detection , The same size and type as the original picture
int block Size, // Represents the size of the neighborhood cornerEigenValsAndVecs() It's said in
int ksize, // Express Sobel() The size of the aperture of the operator
double k, // Calculate k value , Usually take 0.04~0.06;
int borderType = BORDER_DEFAULT // Boundary mode of image pixels . Note that it has a default value BORDER_DEFAULT
)void cv::cornerHarris( InputArray _src,OutputArray _dst, int blockSize, int ksize, double k, int borderType )
{
Mat src = _src.getMat();
_dst.create( src.size(), CV_32F );
Mat dst = _dst.getMat();
cornerEigenValsVecs( src, dst, blockSize, ksize, HARRIS, k, borderType);
}
tatic void
cornerEigenValsVecs( const Mat& src,Mat& eigenv, int block_size,
int aperture_size, intop_type, double k=0.,
intborderType=BORDER_DEFAULT )
{
#ifdef HAVE_TEGRA_OPTIMIZATION
if (tegra::cornerEigenValsVecs(src, eigenv, block_size, aperture_size,op_type, k, borderType))
return;
#endif
int depth = src.depth();
double scale = (double)(1 << ((aperture_size > 0 ?aperture_size : 3) - 1)) * block_size;
if( aperture_size < 0 )
scale *= 2.;
if( depth == CV_8U )
scale *= 255.;
scale = 1./scale;
CV_Assert( src.type() == CV_8UC1 || src.type() == CV_32FC1 );
Mat Dx, Dy;
if( aperture_size > 0 )
{
Sobel( src, Dx, CV_32F, 1, 0, aperture_size, scale, 0, borderType );
Sobel( src, Dy, CV_32F, 0, 1, aperture_size, scale, 0, borderType );
}
else
{
Scharr( src, Dx, CV_32F, 1, 0, scale, 0, borderType );
Scharr( src, Dy, CV_32F, 0, 1, scale, 0, borderType );
}
Size size = src.size();
Mat cov( size, CV_32FC3 );
int i, j;
for( i = 0; i < size.height; i++ )
{
float* cov_data = (float*)(cov.data + i*cov.step);
const float* dxdata = (const float*)(Dx.data + i*Dx.step);
const float* dydata = (const float*)(Dy.data + i*Dy.step);
for( j = 0; j < size.width; j++ )
{
float dx = dxdata[j];
float dy = dydata[j];
cov_data[j*3] = dx*dx;
cov_data[j*3+1] = dx*dy;
cov_data[j*3+2] = dy*dy;
}
}
boxFilter(cov, cov, cov.depth(), Size(block_size, block_size),
Point(-1,-1), false, borderType );
if( op_type == MINEIGENVAL )
calcMinEigenVal( cov, eigenv );
else if( op_type == HARRIS )
calcHarris( cov, eigenv, k );
else if( op_type == EIGENVALSVECS )
calcEigenValsVecs( cov, eigenv );
}
}
6、 ... and 、 Code demonstration

#if 1 // harris Corner detection
const char* INPUT_TITLE = " Original picture ";
const char* OUT_TITLE = " The original image shows corners ";
const char* OUT_TITLE2 = " Grayscale image shows corners ";
Mat src, src1, gray;
int g_nThresh = 30; // Current threshold
int g_nMaxThresh = 175;
void callbackCornerHarris(int, void*)
{
Mat dstImage; // Goal map
Mat normImage; // Normalized graph
Mat scaledImage; // The graph of eight bit unsigned shaping after linear transformation
// Set to zero the two pictures currently to be displayed , That is, clear their values the last time this function was called
dstImage = Mat::zeros(src.size(), CV_32FC1);
src1 = src.clone();
// Corner detection
cornerHarris(gray, dstImage, 2, 3, 0.04, BORDER_DEFAULT);
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
// The normalized graph is linearly transformed into 8 Bit unsigned shaping
convertScaleAbs(normImage, scaledImage);
// What will be detected , And the corner points that meet the threshold conditions are drawn
for (int i = 0; i < normImage.rows; i++)
{
for (int j = 0; j < normImage.cols; j++)
{
if ((int)normImage.at<float>(i, j) > g_nThresh + 80)
{
circle(src1, Point(j, i), 5, Scalar(10, 10, 255), 2, 8, 0);
circle(scaledImage, Point(j, i), 5, Scalar(0, 10, 255), 2, 8, 0);
}
}
}
imshow(OUT_TITLE, src1);
imshow(OUT_TITLE2, scaledImage);
}
int main()
{
src = imread("C:\\Users\\19473\\Desktop\\opencv_images\\corners.png");
if (!src.data)
{
printf("could not load image....\n");
}
imshow(INPUT_TITLE, src);
src.copyTo(src1);
cvtColor(src1, gray, COLOR_BGR2GRAY);
namedWindow(OUT_TITLE, WINDOW_AUTOSIZE);
createTrackbar(" threshold :", OUT_TITLE, &g_nThresh, g_nMaxThresh, callbackCornerHarris);
callbackCornerHarris(0, NULL);
waitKey(0);
return 0;
}
#endif
边栏推荐
- Synchronization control between tasks
- 我想各位朋友都应该知道学习的基本规律就是:从易到难
- 对于新入行的同学,如果你完全没有接触单片机,建议51单片机入门
- 干单片机这一行的时候根本没想过这么多,只想着先挣钱养活自己
- 新系列单片机还延续了STM32产品家族的低电压和节能两大优势
- 使用密钥对的形式连接阿里云服务器
- 单片机现在可谓是铺天盖地,种类繁多,让开发者们应接不暇
- Opencv notes 20 PCA
- STM32 interrupt switch
- My openwrt learning notes (V): choice of openwrt development hardware platform - mt7688
猜你喜欢
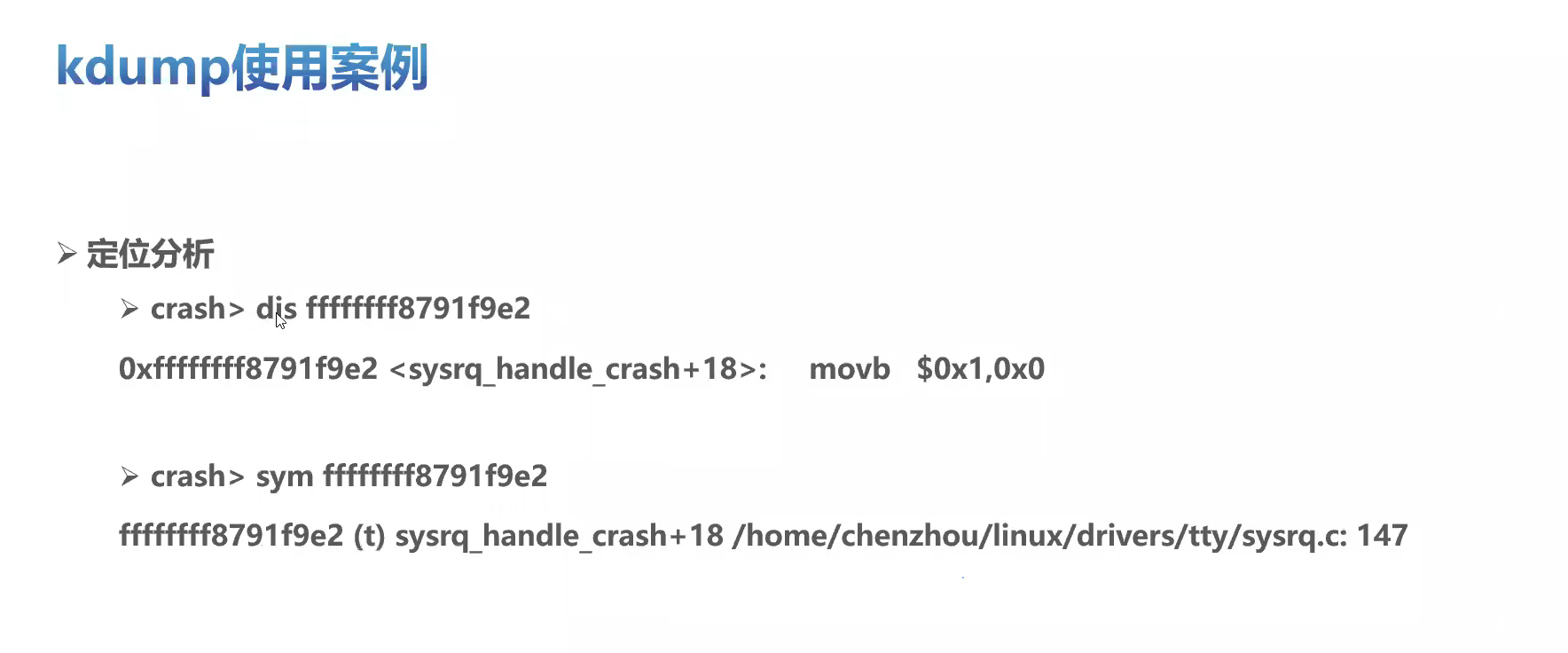
openEuler kernel 技術分享 - 第1期 - kdump 基本原理、使用及案例介紹
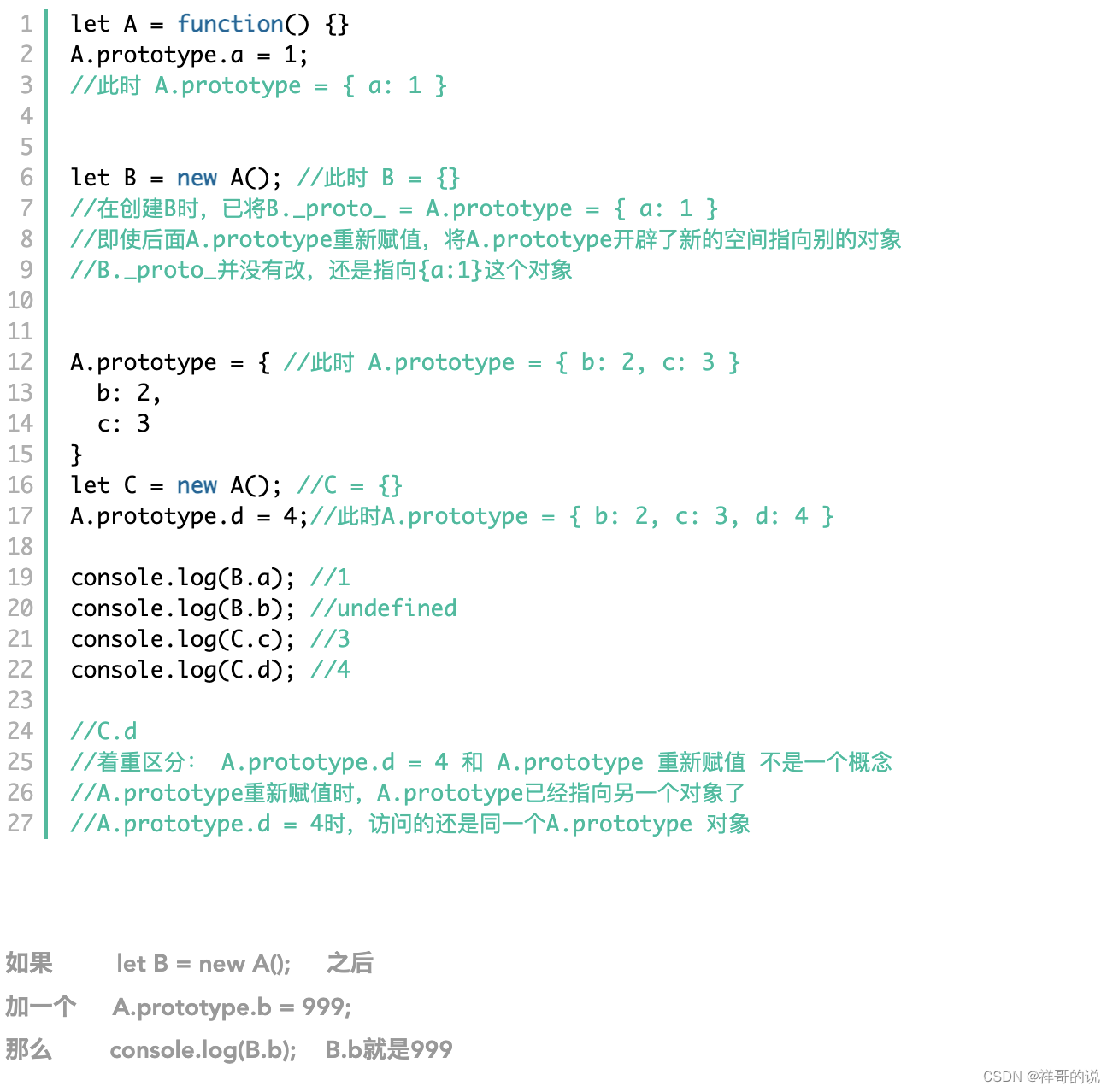
JS基础-原型原型链和宏任务/微任务/事件机制

Opencv note 21 frequency domain filtering
Vgg16 migration learning source code
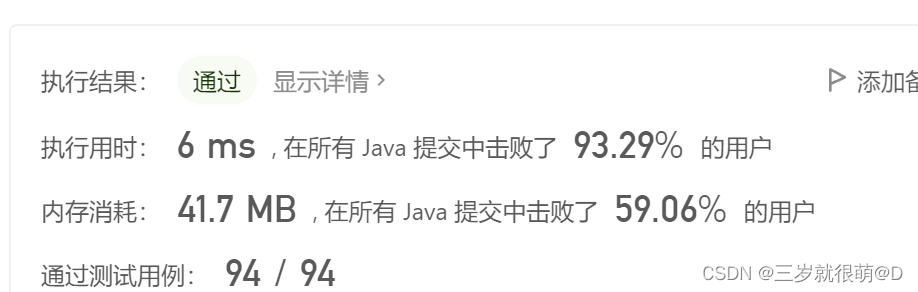
LeetCode - 1670 设计前中后队列(设计 - 两个双端队列)

手机都算是单片机的一种,只不过它用的硬件不是51的芯片

学习开发没有捷径,也几乎不存在带路会学的快一些的情况

Retinaface: single stage dense face localization in the wild

2021-10-27
SCM is now overwhelming, a wide variety, so that developers are overwhelmed
随机推荐
Screen display of charging pile design -- led driver ta6932
Timer and counter of 51 single chip microcomputer
我想各位朋友都应该知道学习的基本规律就是:从易到难
My 4G smart charging pile gateway design and development related articles
4G module initialization of charge point design
Installation and removal of MySQL under Windows
Seven sorting of ten thousand words by hand (code + dynamic diagram demonstration)
Circular queue related design and implementation reference 1
2.Elment Ui 日期选择器 格式化问题
Notes on C language learning of migrant workers majoring in electronic information engineering
RESNET code details
[combinatorics] Introduction to Combinatorics (combinatorial idea 3: upper and lower bound approximation | upper and lower bound approximation example Remsey number)
YOLO_ V1 summary
Mobile phones are a kind of MCU, but the hardware it uses is not 51 chip
Windows下MySQL的安装和删除
Problems encountered when MySQL saves CSV files
嵌入式本来就很坑,相对于互联网来说那个坑多得简直是难走
要選擇那種語言為單片機編寫程序呢
For new students, if you have no contact with single-chip microcomputer, it is recommended to get started with 51 single-chip microcomputer
Opencv notes 17 template matching