当前位置:网站首页>【合辑】点云基础知识及点云催化剂软件功能介绍
【合辑】点云基础知识及点云催化剂软件功能介绍
2022-06-27 05:29:00 【氧艺】
【合辑】点云智能处理
文章出自点云催化剂微信公众号
| 01 | 点云智能分类研究进展与展望 |
| 02 | 点云催化剂,催化你的点云——软件介绍(上) |
| 03 | 点云催化剂,催化你的点云——软件介绍(下) |
| 04 | 基于实体的点云智能处理催化从点云数据到信息的行业应用进程 |
| 05 | 点云空间数据组织——八叉树 |
| 06 | 机载LiDAR数据的多回波信息分析及其在滤波中的应用 |
| 07 | 机载激光雷达点云多实体多层次分类方法 |
| 08 | 利用KD-树剔除机载雷达点云粗差的方法研究 |
| 09 | LAS数据结构介绍 |
| 10 | 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(一) |
| 11 | 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(二) |
| 12 | 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(三) |
| 13 | 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(四) |
| 14 | 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(五) |
| 15 | 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(六) |
| 16 | 机载激光雷达原理与应用科普(一) |
| 17 | 机载激光雷达原理与应用科普(二) |
| 18 | 机载激光雷达原理与应用科普(三) |
| 19 | 机载激光雷达原理与应用科普(四) |
| 20 | 机载激光雷达原理与应用科普(五) |
| 21 | 机载激光雷达原理与应用科普(六) |
| 22 | 机载激光雷达原理与应用科普(七) |
| 23 | 机载激光雷达原理与应用科普(八) |
| 24 | 机载激光雷达原理与应用科普(九) |
| 25 | 机载激光雷达原理与应用科普(十) |
| 26 | 机载激光雷达原理与应用科普(十一) |
| 27 | 机载激光雷达原理与应用科普(十二) |
| 28 | 波形数据特点及其处理 |
| 29 | LiDAR点云数据及其处理 |
| 30 | 机载LiDAR数据的特点 |
| 31 | 机载LiDAR数据的组织形式 |
| 32 | 机载LiDAR技术特点 |
| 33 | 机载LiDAR数据误差源分析 |
| 34 | 激光测距误差对激光脚点定位的影响 |
| 35 | 2020年项目经验分享:20厘米厚的无人机激光雷达点云,能否做大比例尺的河道数字高程模型? |
| 36 | PCA/PCC软件中一键式超高密度的无人机LiDAR点云滤波和精细地形提取 |
| 37 | 机载LiDAR数据系统误差消除 |
| 38 | 机载Lidar数据滤波方法研究 |
| 39 | 滤波难点分析 |
| 40 | 大疆禅思L1及点云特性分析 |
| 41 | 激光雷达的发展 |
点云是目前摄影测量、遥感、计算机视觉等多个领域广泛应用的数据源之一,而信息提取是点云处理、分析和应用的必经环节。为此,学术界已经提出了大量点云信息提取方法。本文从基元类型、提取特征、特征选择与分类器等3个视角概括了点云信息提取的相关研究现状,总结出点云信息提取存在的5个主要问题,点明了点云信息提取的6个主要发展趋势,并着重介绍了“融合多基元的点云信息提取范式”。
点云催化剂是点云数据智能后处理和分析软件套装,包括点云处理和点云可视化两个部分,本文介绍背景及点云催化剂特点。
本文介绍点云催化剂软件所需电脑配置及一键式功能使用说明,最后是案例分析。
04 基于实体的点云智能处理催化从点云数据到信息的行业应用进程
本文重点介绍了点云处理的研究进展,包括:采用多基元(基本处理单元)的点云处理与分析-特征差异显著的点云、精细地形提取(基于对象的滤波方法)、机载点云单木分割、信息提取和三维重建、面向平面精确提取的表面生长方法,并介绍了点云催化剂软件的功能特点及案例分析。
介绍八叉树的基本逻辑和实现代码
本文通过分析机载LiDAR系统获取的激光数据的多回波特性,阐述了多回波信息对地物类型信息的揭示作用,并将多回波特性用于减少参与滤波的激光脚点数量。实验证明,本文提出的滤波方案,可以预先剔除掉大部分的植被激光脚点和部分的建筑物激光脚点,这既减少了参与滤波的数据量,又可以改善滤波算法对建筑物和植被的滤除效果。
点云分类作为机载激光雷达点云目标提取、模型重建等应用的前提,已经得到了广泛研究。目前,这些研究按其分类策略,可以分为三类,即逐点分类、基于分割的点云分类、多实体点云分类。此外,现有研究已经为点云设计了大量分类特征,用以描述点邻域和分割面片属性,进而增加分类过程的可区分度。
粗差剔除是机载LiDAR点云数据后处理中的关键步骤之一,它对后续的滤波操作具有重要的影响。但已有的粗差剔除方法存在需要大量人工干预或者普适性差的缺点。本文在使用高程直方图剔除显著的高位、低位粗差基础上,利用KD-树组织机载LiDAR点云数据,通过判断当前点与其k个最邻近点的平均距离的大小来自适应的识别粗差点。
09 LAS数据结构介绍
机载雷达技术作为一种高精度的三维地物探测手段,其相应的数据格式也在不断发展。美国摄影测量与遥感协会下的LIDAR委员会与2003年发布了标准LIDAR数据格式LAS,本文旨在解析及科普LAS数据格式的内部存储方式。
10 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(一)
在测绘领域,激光雷达(LiDAR)测量技术被誉为是继GPS技术之后的又一次技术革命。基于搭载平台类型,可以细分为星载、机载、地面/地基、车载、背包、船载LiDAR等。其中,机载LiDAR测量技术较为常见,主要用于获取被测量区域的高精度、高分辨率的数字高程模型、数字表面模型、电力巡线、林业资源调查、城市三维模型制作等。目前,机载LiDAR又可以进一步细分为有人机LiDAR、无人机LiDAR,而无人机LiDAR是近几年发展的热点。
11 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(二)
目前对机载LiDAR点云密度的认知也存在下述10个尚有争议、需要重点突出的问题,本文将进行具体分析。
12 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(三)
点云催化剂软件点云可视化效果展示
13 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(四)
稠密的无人机LiDAR点云在测绘、土地利用/地表覆盖、智慧城市、电力巡线、林业资源调查等领域具有广泛的应用,主要体现在能生成更高的分辨率的产品、更精细的目标识别和三维重建效果。
14 稠密的无人机激光雷达点云数据处理与分析方法与工具科普系列(五)
稠密的无人机LiDAR点云面临的问题:数据量大、人才不足、多数机载LiDAR点云数据处理和分析工具与稠密点云的匹配度不高。
激光扫描仪由激光测距单元、光学机械扫描单元以及控制、监测、记录单元等组成。
机载激光雷达(Light Detection AndRanging,LiDAR)集成了全球定位系统(Global Positioning System,GPS)、惯性导航系统(Inertial NavigationSystem,INS)、激光测距系统(Laser Scanning Ranging),能够快速获取地表物体三维坐标信息。作为一种三维空间信息的实时获取手段,在上世纪90年代取得了重大突破,其独特的工作方式和数据处理方法受到国内外专家的广泛关注。
介绍测距发展历程,软硬件发展历程,国内外发展历程。
机载激光雷达的主要应用领域
机载LiDAR的研究热点和难点
机载激光雷达的系统组成
激光扫描仪由激光测距单元、光学机械扫描单元以及控制、监测、记录单元等组成。
机载激光雷达系统对地定位原理及方程
机载激光雷达测量作业生产流程
数据预处理
数据后处理
26 机载激光雷达原理与应用科普(十一)添加链接描述
数据组成
强度信息数据的特点及处理
28 波形数据特点及其处理
波形数据的处理方法:一是阈值法,二是波形分解法,三是反卷积法
点云数据是LiDAR的主要数据,尤其是早期的LiDAR数据处理都是针对点云数据进行的。机载LiDAR激光脚点的分布是按照时间序列进行采样和存储的,其在地面上的分布不是规则的,其空间分布呈现为离散的数据“点云”。这些点中,有些点位于真实地形表面上,有些位于不同的地物上(房屋、管线、烟囱等),还有些落在植被上(数木、灌木、草)等。
30 机载LiDAR数据的特点
机载LiDAR数据的获取具有可以不受地域地形限制、受天气影响较小、数据采集速度快、测量数据精度高、外业作业成本低、数据处理自动化程度高等特点。
一般机载LiDAR数据量很大,如何有效地组织这些数据直接影响到数据处理效率和精度。目前,出现了多种机载LiDAR数据的组织形式,每种数据的组织形式都有其各自的优缺点。
32 机载LiDAR技术特点
LiDAR 系统是一个先进的主动传感系统,它采用激光作为传感的载体。LiDAR 系统本身发射受控制的激光照射地面和地面上的目标,然后接受地面目标的后向散射。LiDAR 系统不同于多光谱扫描系统和航空摄影相机系统,它不依赖太阳光照,所以它是一个全天时日夜可以获得地面数字三维信息的系统。
边栏推荐
- 什么是BFC?有什么用?
- Microservice system design -- distributed transaction service design
- Opencv实现对象跟踪
- RTP 发送PS流工具(已经开源)
- 011 C language basics: C scope rules
- AcWing 第 57 场周赛---BC题挺好
- 论文解读(LG2AR)《Learning Graph Augmentations to Learn Graph Representations》
- DAST black box vulnerability scanner part 6: operation (final)
- three.js第一人称 相机前枪的跟随
- [FPGA] UART serial port_ V1.1
猜你喜欢

双位置继电器DLS-34A DC0.5A 220VDC

jq怎么获取倒数的元素
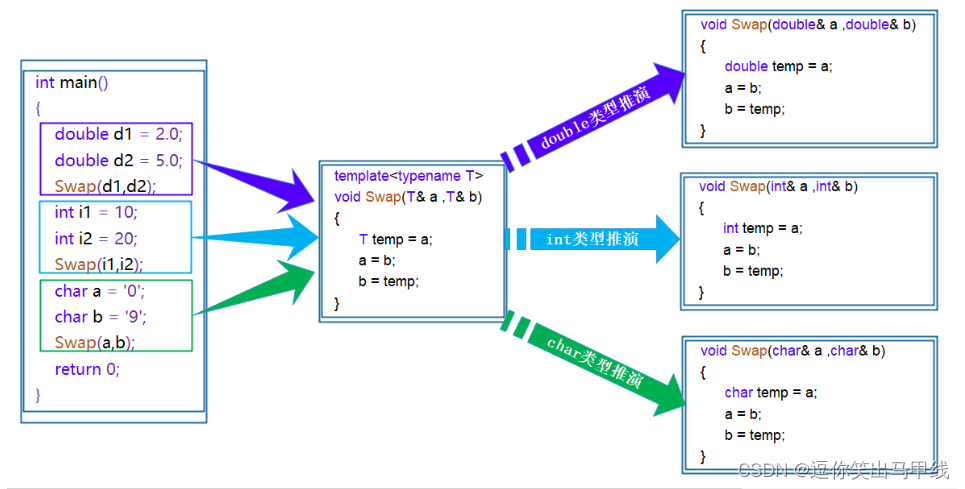
机械转码日记【17】模板,STL简介

重映像(STM32)
![[station B up dr_can learning notes] Kalman filter 3](/img/40/d3ec97be2f29b76a6c049c26ff4998.gif)
[station B up dr_can learning notes] Kalman filter 3

Codeforces Round #802 (Div. 2)

How JQ gets the ID name of an element

Zener diode zener diode sod123 package positive and negative distinction
齐纳二极管 稳压二极管 SOD123封装 正负区分

STM32 reads IO high and low level status
随机推荐
C language implementation timer
Qt使用Valgrind分析内存泄漏
认知篇----2022高考志愿该如何填报
010 C language foundation: C function
Acwing's 57th weekly match -- BC question is very good
How JQ gets the reciprocal elements
Microservice system design -- distributed lock service design
Web3 has not been implemented yet, web5 suddenly appears!
Some articles about component packaging and my experience
面试:Selenium 中有哪几种定位方式?你最常用的是哪一种?
Avoid asteroids
Two position relay hjws-9440
Codeforces Round #802 (Div. 2)
007 basics of C language: C operator
Microservice system design - service fusing and degradation design
022 basics of C language: C memory management and C command line parameters
OpenCV的轮廓检测和阈值处理综合运用
008 C language foundation: C judgment
[station B up dr_can learning notes] Kalman filter 3
Mechanical transcoding journal [17] template, STL introduction