当前位置:网站首页>阿特拉斯atlas扭矩枪 USB通讯教程基于MTCOM
阿特拉斯atlas扭矩枪 USB通讯教程基于MTCOM
2022-07-03 15:08:00 【11eleven】
做自动化行业的童鞋怎么都绕不开扭力枪这个工具,然后就涉及到扭力枪的数据收集的工作,一般是收集扭力和角度的值,扭力枪业界有开放protocol 协议,基于WEBSCOKET进行应答数据收集。今天给大家介绍的是atalas的USB通讯,基于MTCOM DLL的函数指令通讯。
MTCOM是atlas官方的DLL函数库提供一些关于控制器数据收集的函数指令,一般来说我们只收集扭矩角度,这里有个注意的地方就是拧紧工站后程序需要再短时间内使用读取函数进行读取,否则就读取不到了,也就是说读取的动作需要再拧紧工作前开启,读取结束后关闭,采用轮询的方式进行读取。先从控制器上找到SN码,然后进行初始化连接 打开设备,最后按需轮询数据。代码如下,SDKDLL下载路径 MTCOM DLL
直接看代码
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Runtime.InteropServices;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using TestTool.Utility;
namespace TestTool.ToolForm
{
public partial class Atlas400Form : Form
{
#region 初始化库
/*
* MT_Init
* 这个函数初始化MTCom DLL,必须在MTCom的任何其他函数之前调用•使用API
*/
[DllImport("MTCom.dll", EntryPoint = "MT_Init")]
public static extern bool MT_Init();
/*
* MT_GetVersion
* 此函数用于检索MTCom DLL的版本号。如果函数调用成功,则版本将包含以null结尾的版本号字符串。
*/
[DllImport("MTCom.dll", EntryPoint = "MT_GetDllVersion")]
public static extern bool MT_GetDllVersion([MarshalAs(UnmanagedType.LPStr)] StringBuilder version);
/*
* MT_GetDeviceList
* 该函数用于检索当前连接的微环器件的序列号。如果函数调用成功,oDevices将包含一个分号分隔的序列号列表,oDeviceCount将包含连接的设备的数量
*/
[DllImport("MTCom.dll", EntryPoint = "MT_GetDeviceList")]
public static extern bool MT_GetDeviceList([MarshalAs(UnmanagedType.LPStr)] StringBuilder devices, out int deviceCount);
/*
* MT_GetDeviceInfo
* 此函数用于检索具有给定序列号的设备的信息。如果函数calll成功,oDevicestatus将保持连接状态,oDevicetype将保持连接的设备类型。两个参数的有效值列表请参考以下表格
*/
public enum DeviceStatusEnum : int { MT_DEVICE_NOT_FOUND = 0, MT_DEVICE_PRESENT, MT_DEVICE_CONNECTED, MT_DEVICE_READY }
public enum DeviceTypeEnum : int { MT_DEVICE_UNKNOWN = 0, MT_DEVICE_MICROTEST_MC, MT_DEVICE_MICROTORQUE_G4, MT_DEVICE_ACTA_MT4, MT_DEVICE_MTF400_BASIC, MT_DEVICE_MTF400_ADVANCED }
[DllImport("MTCom.dll", EntryPoint = "MT_GetDeviceInfo")]
public static extern bool MT_GetDeviceInfo([MarshalAs(UnmanagedType.LPStr)] string serial, [MarshalAs(UnmanagedType.I4)] out DeviceStatusEnum deviceStatus, [MarshalAs(UnmanagedType.I4)] out DeviceTypeEnum deviceType);
/*
* MT_Open
* 该函数打开到具有给定序列号的设备的连接,并返回打开的设备的句柄。如果它不能打开到设备的连接,它将返回无效的句柄值。预留作日后使用,并应设为0)保留
*/
public readonly static IntPtr INVALID_HANDLE_VALUE = new IntPtr(-1);
[DllImport("MTCom.dll", EntryPoint = "MT_Open")]
public static extern IntPtr MT_Open([MarshalAs(UnmanagedType.LPStr)] string serial, int reserved);
/*
* MT_Close
* 此函数关闭到设备的开放连接,它不返回任何内容。
*/
[DllImport("MTCom.dll", EntryPoint = "MT_Close")]
public static extern IntPtr MT_Close(ref IntPtr client);
/*
*MT_Clear
* 此函数清除指定通道上以前接收的所有数据集。如果使用通道号13或14调用,它可用于清除设备的摘要数据和摘要序列号。
*/
[DllImport("MTCom.dll", EntryPoint = "MT_Clear")]
public static extern bool MT_Clear(IntPtr client, int channel);
/*
*MT_WriteSet
* 此函数将数据集写入设备。该应用程序可以选择建立整个数据集,包括控制字符,通道号和校验和,并传递给MT WriteSet或它可以选择的命令,让MTCom建设的dat
*/
[DllImport("MTCom.dll", EntryPoint = "MT_WriteSet")]
public static extern bool MT_WriteSet(IntPtr client, int channel, [MarshalAs(UnmanagedType.LPArray)] byte[] dataset, int noBytes);
/*
*MT_ReadSet
* 这个函数从设备读取数据集。如果发生实际错误,该函数将仅指示失败(返回FALSE)。如果它超时等待数据集,它将返回TRUE并将oBytesRead设置为零。
*/
[DllImport("MTCom.dll", EntryPoint = "MT_ReadSet")]
public static extern bool MT_ReadSet(IntPtr client, int channel, [MarshalAs(UnmanagedType.LPArray)][Out] byte[] buffer, [MarshalAs(UnmanagedType.I4)] out int noBytes, int timeOut);
/*
* MT_GetSummary
* 这个函数检索MTCom接收到的最后一个汇总(最后一个联合的结果)。当一个关节完成时,微扭矩设备在通道13和14上自动发送汇总协议数据。由于此函数仅返回MTCom接收到的最后一个摘要,因此依赖于此函数检索摘要数据的应用程序应该跟踪序列号,以确保检索到的摘要是正确的。参见下一章中的示例。作为oSummary传递的字节数组的大小必须等于或大于1kb
*/
[DllImport("MTCom.dll", EntryPoint = "MT_GetSummary")]
public static extern bool MT_GetSummary(IntPtr client, [MarshalAs(UnmanagedType.LPArray)][Out] byte[] summary, [MarshalAs(UnmanagedType.I4)] out int noBytes, [MarshalAs(UnmanagedType.I4)] out int sequenceNo);
/*
* MT_GetNoTraceChannels
* 该函数用于获得微力矩装置的最大跟踪通道数。
*/
[DllImport(@"MTCom.dll", EntryPoint = "MT_GetNoTraceChannels")]
public static extern bool MT_GetNoTraceChannels(IntPtr client, [MarshalAs(UnmanagedType.I4)] out int noTraceChannels);
/*
* MT_GetTraceInfo
* 这个函数用于获取关于MTCom中最后一个被缓冲的关节的跟踪信息。我将检索跟踪中的点数、采样率(以采样/秒为单位)和扭矩单元
*/
public enum UnitEnum : int { MTU_mNm = 0, MTU_cNm, MTU_Nm, MTU_mN, MTU_N, MTU_kN, MTU_inlbf, MTU_lbf, MTU_inozf, MTU_gcm, MTU_kgm, MTU_ftlbf, MTU_ozf, MTU_kgf, MTU_gf, MTU_INVALID = -1, }
[DllImport("MTCom.dll", EntryPoint = "MT_GetTraceInfo")]
public static extern bool MT_GetTraceInfo(IntPtr client, int traceChannel, [MarshalAs(UnmanagedType.I4)] out int noPoints, [MarshalAs(UnmanagedType.I4)] out int sampleRate, [MarshalAs(UnmanagedType.I4)] out int torqueUnit);
/*
* MT_GetTracePoints
* 此函数检索MTCom中当前已缓存的跟踪的实际跟踪点。应该首先调用MT GetTraceInfo来获得可用的点数。根据传递给它的参数,可以使用该函数来检索整个跟踪或部分跟踪。变量traceChannel表示MTCom应该为哪个通道检索跟踪数据。通常这是通道0(在G4中是驱动器,在acme - mt4中是第一个传感器)。作为TracePoints传递的MT跟踪点结构数组应该能够保存在变量maxPoints中传递的点的数量。整数起始点指示MTCom应在何处开始复制跟踪数据的跟踪点。
*/
[DllImport("MTCom.dll", EntryPoint = "MT_GetTracePoints")]
public static extern bool MT_GetTracePoints(IntPtr client, int traceChannel, [MarshalAs(UnmanagedType.LPArray)][Out] TracePointStruct[] points, int startPoint, int maxPoints, [MarshalAs(UnmanagedType.I4)] out int noPoints);
[StructLayout(LayoutKind.Sequential, Pack = 1, Size = 16)]
public struct TracePointStruct
{
[MarshalAs(UnmanagedType.R8)]
public double torque;
[MarshalAs(UnmanagedType.R8)]
public double angle;
}
/*
* MT_GetOutput
* 它返回设备内部输出的状态。检索到的值是位掩码,根据查询的设备类型不同,其意义也不同。
*/
[DllImport("MTCom.dll", EntryPoint = "MT_GetOutput")]
public static extern bool MT_GetOutput(IntPtr client, [MarshalAs(UnmanagedType.I4)] out int output);
/*
* MT_GetLastError
* 这个函数返回最后一个失败函数的错误代码。它可以在任何MTCom API 1之后调用
*/
public enum ErrorCodeEnum : int
{
MT_OK = 0,
MT_ERR_INVALID_VERSION = -1,
MT_ERR_INVALID_PARAMETER = -2,
MT_ERR_INVALID_DATA = -3,
MT_ERR_INVALID_CHECKSUM = -4,
MT_ERR_CONNECTION_ERROR = -5,
MT_ERR_INVALID_MESSAGE_ID = -6,
MT_ERR_MUTEX_TIMEOUT = -7,
MT_ERR_PIPE_READ_FAILED = -8,
MT_ERR_PIPE_WRITE_FAILED = -9,
MT_ERR_USB_READ_FAILED = -10,
MT_ERR_USB_WRITE_FAILED = -11,
}
[DllImport("MTCom.dll", EntryPoint = "MT_GetLastError")]
public static extern ErrorCodeEnum MT_GetLastError();
#endregion
public Atlas400Form()
{
InitializeComponent();
this.Load += Atlas400Form_Load;
}
private void ShowLog(string str) {
logLines.Insert(0,DateTime.Now.ToString("yyyy-MM-dd HHmmss")+" "+str);
this.Invoke(new Action(() =>
{
TxtLog.Lines = logLines.ToArray();
}));
}
List<string> logLines = new List<string>();
private void Atlas400Form_Load(object sender, EventArgs e)
{
bool initMt = MT_Init();
ShowLog($"初始化COM {initMt}");
if (initMt)
{
}
}
IntPtr client;
private void BtnOpen_Click(object sender, EventArgs e)
{
if (TxtSn.Text.Trim() == "")
{
ShowLog("设备SN不能为空");
return;
}
string serialNo = TxtSn.Text.Trim();
client = MT_Open(serialNo, 0);
if (client != INVALID_HANDLE_VALUE)
{
ShowLog("设备连接成功!");
// byte[] request = System.Text.Encoding.ASCII.GetBytes("IV");
// bool success = MT_WriteSet(client, 5, request, request.Length);
//MT_Close(ref client);
}
else {
ShowLog("设备连接失败!");
}
}
private void BtnRead_Click(object sender, EventArgs e)
{
bool success = MT_GetTraceInfo(client, 13, out int noNopoints, out int sampleRate, out int torqueUnit);
if (success)
{
byte[] reply = new byte[4096];
Task.Run(async () => {
while (true)
{
success = MT_ReadSet(client, 13, reply, out int noBytes, 1000);
if (noBytes > 0)
{
ShowLog($"Reply: {System.Text.Encoding.ASCII.GetString(reply, 0, noBytes)}");
break;
}
else
{
ShowLog($"读取失败,超时");
// Timed out.
}
await Task.Delay(1000);
}
});
//TracePointStruct[] points = new TracePointStruct[noNopoints];
// MT_GetTracePoints(client, TxtChannel.Value.ToInt(), points, 0, points.Length - 1, out int nopoints);
}
else
{
ShowLog($"Operation failed w/err: { MT_GetLastError()}.");
}
}
private void BtnChannel_Click(object sender, EventArgs e)
{
MT_GetNoTraceChannels(client, out int num);
ShowLog($"通道:{num}");
}
}
}
边栏推荐
- "Seven weapons" in the "treasure chest" of machine learning: Zhou Zhihua leads the publication of the new book "machine learning theory guide"
- Global and Chinese markets for indoor HDTV antennas 2022-2028: Research Report on technology, participants, trends, market size and share
- 5-1 blocking / non blocking, synchronous / asynchronous
- What is one hot encoding? In pytoch, there are two ways to turn label into one hot coding
- What is embedding (encoding an object into a low dimensional dense vector), NN in pytorch Principle and application of embedding
- Global and Chinese market of Bus HVAC systems 2022-2028: Research Report on technology, participants, trends, market size and share
- Chapter 14 class part 1
- ASTC texture compression (adaptive scalable texture compression)
- MySQL reports an error: [error] mysqld: file '/ mysql-bin. 010228‘ not found (Errcode: 2 “No such file or directory“)
- [opengl] advanced chapter of texture - principle of flowmap
猜你喜欢
![[ue4] cascading shadow CSM](/img/83/f4dfda3bd5ba0172676c450ba7693b.jpg)
[ue4] cascading shadow CSM

Besides lying flat, what else can a 27 year old do in life?

【Transform】【实践】使用Pytorch的torch.nn.MultiheadAttention来实现self-attention
![[graphics] adaptive shadow map](/img/93/a6a3c7716331368c90c2c86da11f55.jpg)
[graphics] adaptive shadow map

Yolov5系列(一)——网络可视化工具netron
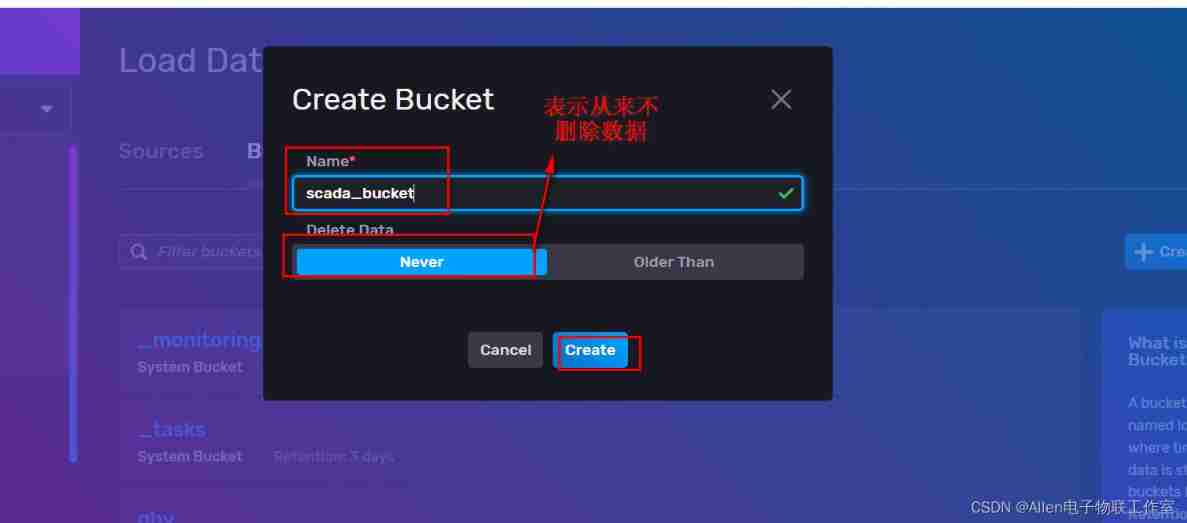
Incluxdb2 buckets create database

Open under vs2019 UI file QT designer flash back problem
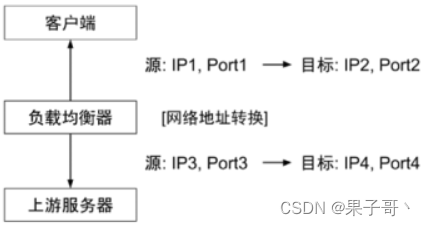
Centos7 deployment sentry redis (with architecture diagram, clear and easy to understand)

远程服务器后台挂起 nohup
【云原生训练营】模块八 Kubernetes 生命周期管理和服务发现
随机推荐
复合类型(自定义类型)
[wechat applet] wxss template style
redis单线程问题强制梳理门外汉扫盲
C string format (decimal point retention / decimal conversion, etc.)
Yolov5进阶之八 高低版本格式转换问题
[transform] [NLP] first proposed transformer. The 2017 paper "attention is all you need" by Google brain team
406. Reconstruct the queue according to height
[Yu Yue education] scientific computing and MATLAB language reference materials of Central South University
Apache ant extension tutorial
Yolov5 advanced 8 format conversion between high and low versions
4-20-4-23 concurrent server, TCP state transition;
高并发下之redis锁优化实战
Kubernetes带你从头到尾捋一遍
第04章_逻辑架构
[graphics] efficient target deformation animation based on OpenGL es 3.0
Open under vs2019 UI file QT designer flash back problem
Byte practice surface longitude
Global and Chinese market of iron free motors 2022-2028: Research Report on technology, participants, trends, market size and share
What is machine reading comprehension? What are the applications? Finally someone made it clear
[probably the most complete in Chinese] pushgateway entry notes