当前位置:网站首页>Classification and discussion of plane grab detection methods based on learning
Classification and discussion of plane grab detection methods based on learning
2022-07-03 05:16:00 【Qianyu QY】
The task of plane grab detection is , Input perceptual data , Output crawl configuration . So far , There are mainly two kinds of learning based plane grab detection methods :
(1) A one-stage end-to-end learning approach .
(2) Two stage learning method .
1、 One stage learning
In this kind of method , Directly learn the mapping function from input data to crawl configuration , Neural networks . The input is usually RGB Image or depth image , Output is Crawl the set of configurations , Then select the optimal crawl configuration according to the confidence . Currently based on Rectangle grabbing indicates The main method is , Such as
(1)Fully Convolutional Grasp Detection Network with Oriented Anchor Box
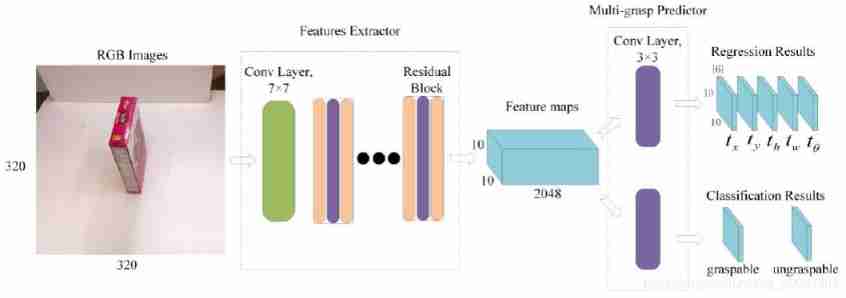
(2)Real-world Multi-object, Multi-grasp Detection

(3)Densely Supervised Grasp Detector (DSGD)

2、 Two stage learning
It includes two stages : Grab configuration sampling , Crawl configuration evaluation . In the first stage, multiple crawl configurations are sampled , The second stage evaluates the quality of each candidate crawl , Then choose the best grab . At present, the best is Dex-Net 4.0:
(1)Dex-Net 4.0: Learning ambidextrous robot grasping policies

3、 Discuss
One stage learning Of GroundTruth It is all the feasible grab configurations on the object , Annotation grab configuration can be manually annotated 、 Robot actual trial and error annotation or automatic generation of virtual environment , There are several problems :
(1) There is no unified standard for manual annotation , There is an error .
(2) Robot tagging is too time-consuming ,2016 year ICRA Of Supersizing Self-supervision: Learning to Grasp from 50K Tries and 700 Robot Hours It took a lot of time , The final result is unsatisfactory .
(3) No matter which annotation method , It is impossible to mark all the feasible grasping methods of the object in detail , It means , Neural networks do not have the best learning target.
(4) Multi object stacking scenes are difficult to label , As a result, the current plane grab data sets are almost all single objects (cornell、Jacquard etc. , Now there should be a synthetic multi-object scene data set , Not paying much attention ), Make the learning network in bin-picking Poor performance in the task .
Two stage learning Of GroundTruth Is the quality of the grab sample , namely 0 or 1. Datasets can automatically generate datasets in a virtual environment , Study of the target And the best , But synthetic image Dex-Net4.0 That kind of millions of samples is not what ordinary laboratories can do . For all that , It can be seen that the two-stage learning method is better than the one-stage learning method , More worthy of study . The next research direction is how to perform crawl detection for small data sets .
边栏推荐
- 微服务常见面试题
- 1095 cars on campus (30 points)
- Shuttle + alluxio accelerated memory shuffle take-off
- Coordinatorlayout appbarrayout recyclerview item exposure buried point misalignment analysis
- Detailed explanation of the output end (head) of yolov5 | CSDN creation punch in
- [develop wechat applet local storage with uni app]
- Disassembly and installation of Lenovo r7000 graphics card
- Unity tool Luban learning notes 1
- Promise
- Go practice -- use JWT (JSON web token) in golang
猜你喜欢
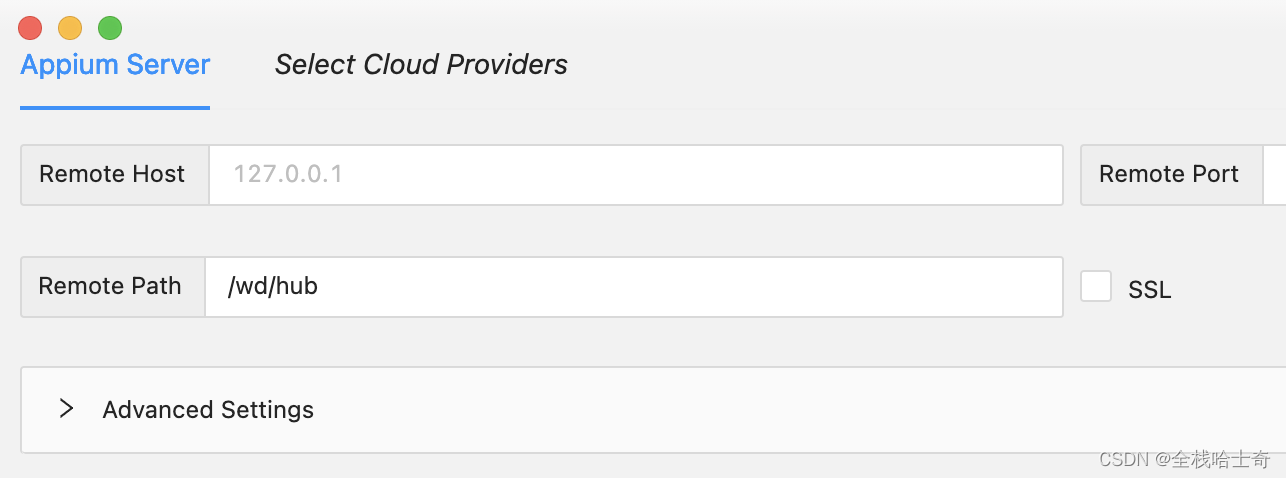
appium1.22. Appium inspector after X version needs to be installed separately
![[basic grammar] Snake game written in C language](/img/cb/83631ef3ccd7047ca42d33dc49bf90.jpg)
[basic grammar] Snake game written in C language

Gbase8s unique index and non unique index

SSM framework integration

Intégration profonde et alignement des séquences de protéines Google
Technical analysis of qianyuantong multi card aggregation router

Compile and decompile GCC common instructions
Appium 1.22. L'Inspecteur appium après la version X doit être installé séparément

Without 50W bride price, my girlfriend was forcibly dragged away. What should I do

RT thread flow notes I startup, schedule, thread
随机推荐
Yolov5 model construction source code details | CSDN creation punch in
动态规划——相关概念,(数塔问题)
Detailed explanation of yolov5 training own data set
在PyCharm中配置使用Anaconda环境
[set theory] relationship properties (symmetry | symmetry examples | symmetry related theorems | antisymmetry | antisymmetry examples | antisymmetry theorems)
Handler understands the record
Online VR model display - 3D visual display solution
Web APIs exclusivity
穀歌 | 蛋白序列的深度嵌入和比對
2022-02-12 daily clock in: problem fine brush
How to connect the network: Chapter 1 CSDN creation punch in
1106 lowest price in supply chain (25 points)
联想R7000显卡的拆卸与安装
Go language interface learning notes
leetcode435. Non overlapping interval
Introduction to redis and explanation of data types
appium1.22.x 版本後的 appium inspector 需單獨安裝
The consumption of Internet of things users is only 76 cents, and the price has become the biggest obstacle to the promotion of 5g industrial interconnection
Pessimistic lock and optimistic lock of multithreading
[set theory] relation properties (transitivity | transitivity examples | transitivity related theorems)